基于交通特征的空域建模方法及扇區(qū)仿真分析
2014-03-21 02:14:22陳陽舟張德夫宋卓希
交通運輸工程與信息學(xué)報 2014年2期
畢 虹 陳陽舟 張德夫 宋卓希
0 引 言
空域動態(tài)扇區(qū)劃分的目的是在保證管制安全和飛行安全的基礎(chǔ)上,均衡分配各扇區(qū)管制員的工作負荷,使其工作負荷在合理的閾值之內(nèi)。要達到動態(tài)扇區(qū)劃分的目標(biāo),關(guān)鍵是對空中交通情況的準(zhǔn)確分析。針對不同的空中交通情況采用與之相適應(yīng)的扇區(qū)劃分,保證管制的安全和效率。空中交通情況通常可以反映在交通特征上,交通特征包括空域靜態(tài)結(jié)構(gòu)特征和空域動態(tài)交通特征。空域靜態(tài)結(jié)構(gòu)特征包括扇區(qū)劃分、航路分布、關(guān)鍵點數(shù)量(機場、航路點、交叉點)、地形、導(dǎo)航輔助設(shè)備等等。空域動態(tài)交通特征隨時間變化而變化,包括空域內(nèi)航空器數(shù)量、航空器混合情況、天氣、航空器間間隔、航空器速度和交通流量限制等。
空域模型作為扇區(qū)優(yōu)化劃分方法的基礎(chǔ),直接影響扇區(qū)劃分結(jié)果。目前,扇區(qū)劃分研究中提出了不同的建模方法。按照空域模型的建立過程中空域特征信息的利用情況,可以將空域模型分為表1中所示的三類。
文獻[1]、[2]采用正六邊形離散空域。文獻[1]中指出了在確定網(wǎng)格大小時應(yīng)考慮的相關(guān)因素。采用網(wǎng)格模型雖然建模簡便,但是,模型不能反映空域交通的信息,只是作為統(tǒng)計管制員工作負荷和扇區(qū)劃分的基本單元,難以滿足扇區(qū)劃分安全性的要求。同時,基于網(wǎng)格模型生成的扇區(qū)邊界呈鋸齒狀,在劃分后需要進行邊界平滑的處理[2]。文獻[3]基于Voronoi圖模型劃分扇區(qū)。先利用優(yōu)化算法優(yōu)化中心點位置,然后利用Voronoi圖算法直接生成扇區(qū)邊界。通過這種方法生成的扇區(qū)邊界可能和航路(或關(guān)鍵點)重合,不能保證滿足扇區(qū)約束條件。
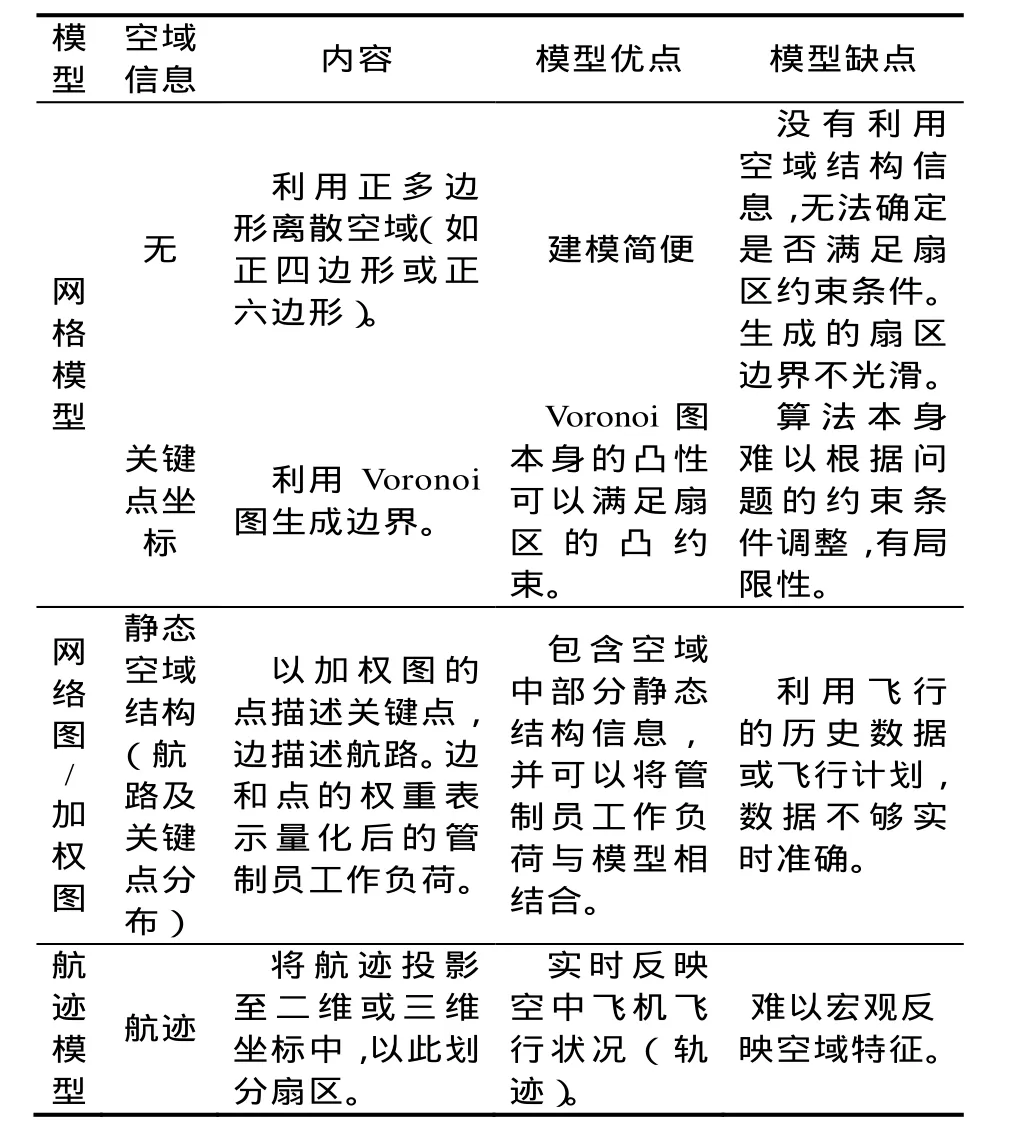
表1 空域模型Tab.1 Airspace model
基于加權(quán)圖模型的研究通常在建立加權(quán)圖模型時采用關(guān)鍵點合并[4]或關(guān)鍵點周圍添加保護區(qū)[5]等方法,保證了劃分后的扇區(qū)滿足扇區(qū)約束條件。由于空中交通是實時變化的復(fù)雜系統(tǒng),空域結(jié)構(gòu)難以反映空域中復(fù)雜的交通情況和不同時刻的交通特征。
航跡模型采用飛機飛行的軌跡作為建模信息[6],軌跡包括飛行的起始終止位置及其對應(yīng)的時間信息。這類研究雖然可以體現(xiàn)某段時間內(nèi)的空域交通實時變化情況,但是,舍棄空域中如關(guān)鍵點位置等這些固定不變的特征,難以判斷約束條件是否得到滿足。
綜合分析現(xiàn)有的空域模型,發(fā)現(xiàn)其均存在不足之處[7]。普遍問題在于空中交通信息利用的不夠充分,
尤其是空域的動態(tài)交通特征信息不全。本文提出一種新的空域建模方法,首先利用空域靜態(tài)結(jié)構(gòu)特征建立空域復(fù)雜網(wǎng)絡(luò)模型,然后,基于空域復(fù)雜性評估空域某段時間內(nèi)的動態(tài)交通特征,并建立空域加權(quán)復(fù)雜網(wǎng)絡(luò)模型。以關(guān)鍵點及其周圍航路作為聚類對象,應(yīng)用基于空域加權(quán)復(fù)雜網(wǎng)絡(luò)的 K-Means聚類算法,將空域分為若干區(qū)域,每個區(qū)域中包含的關(guān)鍵點及其周圍航路具有相似的交通特征,而不同區(qū)域之間的交通特征差異較大,如圖1所示。

圖1 基于交通特征的空域建模流程Fig.1 Modeling process of the airspace based on the traffic features
在實際的空域管理中,應(yīng)盡可能減少扇區(qū)劃分導(dǎo)致的扇區(qū)邊界變化,這樣便于管制員工作交接和對管制空域工作的熟悉。目前,多數(shù)研究都基于點和線(加權(quán)圖模型、航跡模型)或者很小的格子(網(wǎng)格模型)劃分扇區(qū),均可能導(dǎo)致不同時段的扇區(qū)邊界變化過大。如果基于區(qū)域改變扇區(qū)結(jié)構(gòu),不同時間段內(nèi)的扇區(qū)邊界在空間上具有一定的連續(xù)性。本文提出的建模方法將空域按照交通特點分為若干區(qū)域,扇區(qū)的劃分和合并將在這些區(qū)域間進行。這在一定程度上保證扇區(qū)劃分結(jié)構(gòu)和人員配備的連續(xù)性,劃分后的新扇區(qū)滿足方便管制移交和扇區(qū)空域相對集中的要求。除此之外,由于管制員工作負荷中的協(xié)作負荷的大小與扇區(qū)劃分直接相關(guān)的,本文通過聚類將部分交通繁忙的航路包含在聚類后的區(qū)域中,避免扇區(qū)邊界穿過這些航路,減少扇區(qū)邊界的協(xié)作負荷,從而減少整個空域范圍內(nèi)的管制員工作負荷,達到增加空域容量的目的。
1 基于空域交通特征建立空域模型
由于空中交通特征的概念比較抽象,并且涉及復(fù)雜多變的空域動態(tài)特征,在研究中借助空域復(fù)雜性的概念,辨識出與空中交通特征相關(guān)的空域交通復(fù)雜性因素。基于眾多的空域交通復(fù)雜性因素,采用主成分分析法,選取其中的五個主要因素,并將這五個主要因素簡化為兩個反映空域交通特征的指標(biāo)。然后,基于空域交通特征指標(biāo)建立了空域的加權(quán)復(fù)雜網(wǎng)絡(luò)模型。最后,在該空域模型的基礎(chǔ)上將空域聚類,形成空域凸胞模型。
1.1 基于空域復(fù)雜性提取空中交通特征的主要指標(biāo)
航路、管制扇區(qū)、航空器、飛行員、通信設(shè)備及管制員管制過程的相互作用構(gòu)成了動態(tài)空中交通系統(tǒng)。這些因素在不同時刻、不同交通模式下相互影響,構(gòu)成了空中交通的復(fù)雜性[17]。空域復(fù)雜性概念最初的提出是為了研究管制員工作負荷。基于空域復(fù)雜性的工作負荷評估試圖從使管制員產(chǎn)生工作負荷的根本原因——交通特征及其變化情況著手,建立各種復(fù)雜的空域管制因素與工作負荷之間的統(tǒng)計學(xué)關(guān)系。所以,空域復(fù)雜性在某種程度上形容了空域交通特征的各項因素及其復(fù)雜變化。
空域復(fù)雜性研究中最根本的問題是對復(fù)雜性因素的完整系統(tǒng)辨識,目前已歸納出數(shù)十種與空域復(fù)雜性相關(guān)的因素[8]。如交通密度、爬升/下降的航空器數(shù)、高度變化量、航空器速度方差、航行角度方差、交通混合情況、風(fēng)、路徑最近點分布、匯聚角度、航空器意圖認知水平等。對這些空域復(fù)雜性因素進行分析,通過主成分分析選出能代表空域 85% 特征的五個指標(biāo):(1)航空器平均通過時間;(2)總的沖突數(shù)量;(3)航空器平均速度;(4)航空器數(shù)量;(5)爬升的航空器比例。定義了兩個主成分,分別為“密度因子”(主成分一)和“飛行態(tài)勢因子”(主成分二)。通過主成分分析法可知兩個空域交通特征指標(biāo)的得分函數(shù)如下:
密度因子=0.247平均通過時間 + 0.348總沖突次數(shù) - 0.383平均速度 - 0.011爬升航空器比例 + 0.413航空器數(shù)量
飛行態(tài)勢因子=-0.685平均通過時間-0.024總沖突次數(shù)+0.141平均速度+0.465爬升航空器比例-0.153航空器數(shù)量
1.2 基于加權(quán)復(fù)雜網(wǎng)絡(luò)特征的 K-Means聚類算法的空域建模
空域交通系統(tǒng)符合復(fù)雜網(wǎng)絡(luò)的特點[9],將其視為復(fù)雜網(wǎng)絡(luò),不同的空域有不同的節(jié)點分布特點和密集程度,研究空域的范圍及其交通特征也直接影響復(fù)雜網(wǎng)絡(luò)的規(guī)模。加權(quán)復(fù)雜網(wǎng)絡(luò)能夠比較完整地表達復(fù)雜網(wǎng)絡(luò)的結(jié)構(gòu),且可以結(jié)合空域的動態(tài)特征和靜態(tài)特征。本節(jié)將基于加權(quán)復(fù)雜網(wǎng)絡(luò)的聚類方法論述空域凸胞模型的建立方法。
1.2.1 基于加權(quán)復(fù)雜網(wǎng)絡(luò)特征的K- means 聚類算法
本文中的聚類算法利用了加權(quán)復(fù)雜網(wǎng)絡(luò)中節(jié)點加權(quán)度、加權(quán)聚集系數(shù)等概念。節(jié)點的加權(quán)度反映了該節(jié)點與其它節(jié)點的連接強度。節(jié)點的加權(quán)聚集系數(shù)體現(xiàn)了此節(jié)點局部范圍內(nèi)的相互連接密度和強度。由節(jié)點的加權(quán)度和加權(quán)聚集系數(shù)得到加權(quán)網(wǎng)絡(luò)的綜合特征值,則基于加權(quán)復(fù)雜網(wǎng)絡(luò)特征的K- means 聚類算法(WCNFC)步驟如下[10]:
Step1 根據(jù)原始數(shù)據(jù)集計算相似度, 得到相似度矩陣。
Step2 根據(jù)相似度矩陣建立加權(quán)復(fù)雜網(wǎng)絡(luò)。首先以數(shù)據(jù)為節(jié)點, 相似度作為數(shù)據(jù)之間連邊的權(quán)值表示數(shù)據(jù)之間的連接強度。
Step3 計算各個節(jié)點的加權(quán)復(fù)雜網(wǎng)絡(luò)綜合特征值。
Step4 對各節(jié)點的加權(quán)復(fù)雜網(wǎng)絡(luò)綜合特征值進行排序, 形成由大到小的隊列。
Step5 從隊列中依次選取K個加權(quán)網(wǎng)絡(luò)綜合特征值高, 且與已被選作初始聚類中心的節(jié)點之間沒有連邊的節(jié)點作為初始聚類中心。
Step6 以所選的 K個節(jié)點作為初始聚類中心,采用 K-means 算法,根據(jù)相似度矩陣對數(shù)據(jù)集進行劃分迭代,形成聚類。
1.2.2 建立空域凸胞模型
首先,基于靜態(tài)空域結(jié)構(gòu)建立空域復(fù)雜網(wǎng)絡(luò)模型。具體方法如下:將關(guān)鍵點作為網(wǎng)絡(luò)節(jié)點,如果關(guān)鍵點(航路點、航路交叉點和機場)之間有飛機飛行(或航路連接),則認為對應(yīng)的兩個節(jié)點間存在聯(lián)系,以邊相連。圖2為基于北京管制區(qū)靜態(tài)空域結(jié)構(gòu)建立的空域復(fù)雜網(wǎng)絡(luò)模型(圖中所示的航路為北京管制區(qū)主要航路,包含80%以上的交通信息)。

圖2 北京管制區(qū)網(wǎng)絡(luò)Fig.2 Network of Beijing management district
結(jié)合 1.1節(jié)中復(fù)雜性主要指標(biāo)的主成分分析結(jié)果,采用向量空間法將每個關(guān)鍵點周圍的交通特征表示成復(fù)雜性因子向量。因此,對于第i個關(guān)鍵點,有復(fù)雜性向量 di=(t1i, t2i)。其中, t1i表示主成分一在關(guān)鍵點i區(qū)域的值, t2i表示主成分二在關(guān)鍵點i區(qū)域的值。計算相關(guān)聯(lián)節(jié)點之間的相似度,以相似度作為網(wǎng)絡(luò)邊的權(quán)值,建立加權(quán)復(fù)雜網(wǎng)絡(luò),采用WCNFC算法對關(guān)鍵點進行聚類,得到空域的凸胞模型。
由于空域內(nèi)交通分布的不確定性,聚類結(jié)果可能不滿足扇區(qū)連通性約束。故改進算法,在復(fù)雜性因子向量中增加關(guān)鍵點的位置信息,即 di=(t1i, t2i, xi, yi),其中, xi和 yi表示關(guān)鍵點i的坐標(biāo)。這樣可以在一定程度上保證聚類后凸胞內(nèi)關(guān)鍵點的連通性。對于聚類后仍不滿足連通性的類,直接按照連通性分為新的若干類,得到最終的空域凸胞模型(圖3)。由于K-means聚類算法自有的特性,聚類結(jié)果在幾何上具有凸性。為了滿足扇區(qū)最小距離約束和最短時間約束,凸胞的邊界和關(guān)鍵點之間的距離大于最小安全距離。
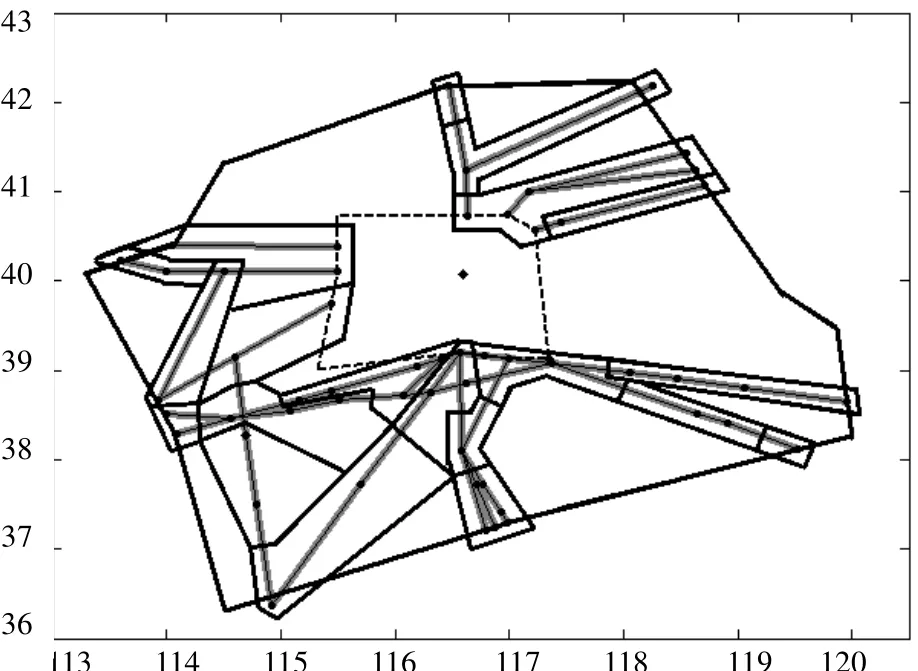
圖3 凸胞模型Fig.3 The conver hull model
2 基于空域凸胞模型的扇區(qū)劃分有效性分析
本文以北京管制區(qū)的實際交通數(shù)據(jù)作為算法應(yīng)用對象,采用文獻[11]中的基于遺傳算法的扇區(qū)劃分方法對北京管制區(qū)進行扇區(qū)劃分。以管制區(qū)內(nèi)航班歷史飛行計劃為主要數(shù)據(jù)來源,用2012年某天(天氣晴朗)的實際交通數(shù)據(jù)對航班歷史飛行計劃進行必要的修正,得到空域的動態(tài)交通數(shù)據(jù)。結(jié)合空域靜態(tài)結(jié)構(gòu),可以得到關(guān)鍵點位置數(shù)據(jù)庫、航路網(wǎng)絡(luò)拓撲結(jié)構(gòu)數(shù)據(jù)庫、航班航跡數(shù)據(jù)庫、航段飛行動作數(shù)據(jù)庫等,這些數(shù)據(jù)庫將作為扇區(qū)劃分算法的數(shù)據(jù)基礎(chǔ)。
2.1 空域建模方法有效性分析
北京管制區(qū)的交通高峰期為13:00至17:00。圖4反映了北京管制區(qū)的交通流量在高峰期的平均分布情況,航跡的密集程度與航段的交通繁忙情況成正比。對比圖2可以看出,通過聚類算法生成的凸胞內(nèi)包含一部分交通繁忙的航段。
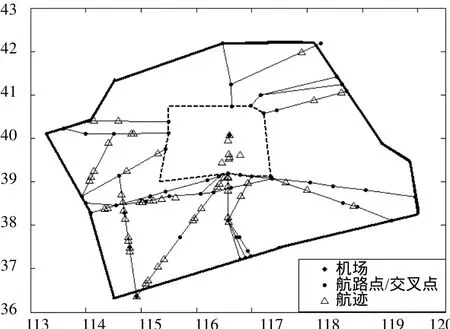
圖4 北京管制區(qū)交通高峰期交通分布示意Fig.4 Traffic distribution in the traffic peak of Beijing traffic management district
由于加權(quán)圖模型在扇區(qū)劃分研究中的應(yīng)用最為普遍,本文將基于相同的扇區(qū)優(yōu)化劃分算法,分別基于凸胞模型和加權(quán)圖模型對北京管制區(qū)進行扇區(qū)劃分。圖5展示了不同的兩個時間段內(nèi)基于兩種空域模型的扇區(qū)劃分結(jié)果(每個時段的北京管制區(qū)均具有相同的扇區(qū)數(shù))。表2為不同時段扇區(qū)劃分所對應(yīng)的管制員工作負荷。


圖5 扇區(qū)劃分結(jié)果Fig.5 Sectorization results

表2 管制員工作負荷Tab.2 Work loads of the management staff
以高峰期(13:00—19:00)為例,圖5a中的協(xié)作負荷小于圖5b中的協(xié)作負荷,這使得總負荷減少了15.7%。并且,圖5a中扇區(qū)的劃分在空間上有一定的連續(xù)性,較圖5b的變動小。這樣利于管制員工作的交接和對管制空域的熟悉,在一定程度上保證扇區(qū)結(jié)構(gòu)的穩(wěn)定性。
2.2 基于凸胞模型扇區(qū)優(yōu)化方法的有效性分析
本文將通過扇區(qū)的安全性、工作負荷的均衡性等幾個方面分析扇區(qū)劃分結(jié)果。在扇區(qū)劃分滿足扇區(qū)約束條件的基礎(chǔ)上,用以下幾個指標(biāo)量化性能評價標(biāo)準(zhǔn):
(1)扇區(qū)數(shù)目 扇區(qū)數(shù)目應(yīng)與空域交通情況的變化相適應(yīng),盡可能少的扇區(qū)數(shù)目有利于減少管制成本。
(2)停留時間 航班在扇區(qū)內(nèi)有較長的停留時間,不僅有利于管制安全,還將減少穿越扇區(qū)邊界的次數(shù),提高飛行效率。
(3)扇區(qū)內(nèi)的航班數(shù) 扇區(qū)內(nèi)包含較多的航班有利于增加扇區(qū)空域的使用率。但是,由于扇區(qū)內(nèi)的管制員工作負荷與其所管制的航班數(shù)直接相關(guān),考慮到管制安全,各扇區(qū)包含的航班數(shù)不應(yīng)超過管制的安全上限M。通常認為管制員所承受的管制負荷應(yīng)小于其最大所能承受工作負荷的80%。假設(shè)每個扇區(qū)的管制員最多可同時管制10架飛機,則本文中M取8。
為了基于扇區(qū)數(shù)目評價扇區(qū)劃分的安全性和均衡性,我們借助統(tǒng)計分析中概率和數(shù)學(xué)期望的概念,引入每分鐘扇區(qū)內(nèi)包含k架飛機的概率P(k)、平均飛機數(shù)k和扇區(qū)安全概率C,具體定義如下:

式中,T表示扇區(qū)劃分周期內(nèi)的累計分鐘數(shù); Nsector表示該周期內(nèi)的扇區(qū)數(shù)目; k = 1 ,2,…, n 表示任意采樣時刻某個扇區(qū)內(nèi)包含的飛機數(shù);n表示每分鐘各扇區(qū)中包含最多的飛機數(shù); Nairplane表示在整個周期內(nèi)各扇區(qū)包含k架飛機數(shù)的次數(shù);則

其中,k反映了扇區(qū)內(nèi)飛機數(shù)目的平均值;C表示扇區(qū)劃分周期內(nèi)安全管制時間的百分比,理想值為100%,即整個扇區(qū)劃分周期內(nèi)每個扇區(qū)所包含的飛機數(shù)都小于管制安全的上限M。
2.2.1 交通高峰期扇區(qū)劃分算法有效性分析
扇區(qū)劃分的主要目標(biāo)是各扇區(qū)管制員工作負荷均衡。若以10分鐘為統(tǒng)計周期,分別計算北京管制區(qū)交通高峰期(13:00—19:00)每個周期內(nèi)各扇區(qū)的平均飛機數(shù),得到該時間段內(nèi)平均飛機數(shù)的變化情況:每個扇區(qū)的平均飛機數(shù)大致圍繞5波動,曲線基本包絡(luò)在4.5—5.5的范圍內(nèi)。這說明劃分的扇區(qū)負荷基本均衡,在高峰期內(nèi)各扇區(qū)的飛機數(shù)目基本保持在小范圍內(nèi)波動,交通量比較穩(wěn)定。
高峰期內(nèi)北京管制區(qū)各扇區(qū)的平均停留時間和最短停留時間如圖6所示。每個扇區(qū)的平均停留時間基本都在十分鐘以上,最短停留時間保證在5 min左右,則北京管制區(qū)的平均停留時間為17.013 min,最短停留時間為 3 min。扇區(qū)劃分可保證管制員有足夠的時間管制進入扇區(qū)的飛機。

圖6 停留時間Fig.6 Stay time
取一分鐘為采樣時間,圖7表示了在高峰期內(nèi)每個扇區(qū)內(nèi)曾出現(xiàn)過的最大飛機數(shù)。扇區(qū)2和扇區(qū)6曾出現(xiàn)過 9架飛機,超越管制安全上限的時間分別為3 min和7 min。在高峰期內(nèi),T = 2 40,Nsector= 6 ,N =8,P( k)的概率分布曲線如圖8所示。在該時間段內(nèi),每個采樣時刻每個扇區(qū)平均包含5架飛機(k= 4 .982)。C= 9 9.51%,表示超過99%以上的時間,各扇區(qū)內(nèi)包含的飛機數(shù)滿足安全要求,劃分的扇區(qū)可以保證管制的安全性。
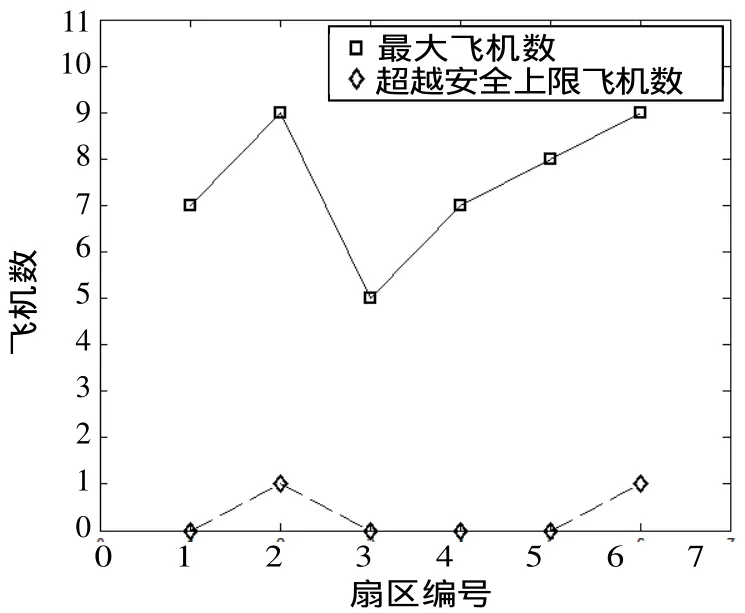
圖7 扇區(qū)內(nèi)最大的飛機數(shù)Fig.7 The biggest plane number in the sector
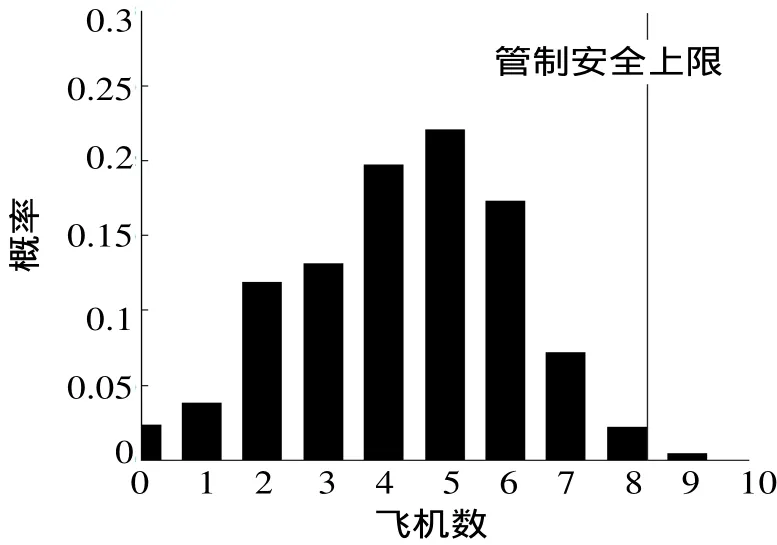
圖8 飛機數(shù)的概率分布(劃分扇區(qū))Fig.8 Probability distribution in the divided sectors
圖9 為北京管制區(qū)當(dāng)前的扇區(qū)劃分結(jié)構(gòu)。基于相同的交通數(shù)據(jù)計算當(dāng)前扇區(qū)劃分高峰期的 P ( k)的概率分布曲線(圖10),其中 T = 2 40,Nsector=2,N = 1 4。平均飛機數(shù)k= 3 .58和扇區(qū)安全概率 C = 9 8.27%。劃分后的扇區(qū)明顯在安全性上高于當(dāng)前的扇區(qū),并且扇區(qū)的利用率更高更均衡。

圖9 北京管制區(qū)當(dāng)前扇區(qū)劃分Fig.9 Current sectorization of Beijing management district
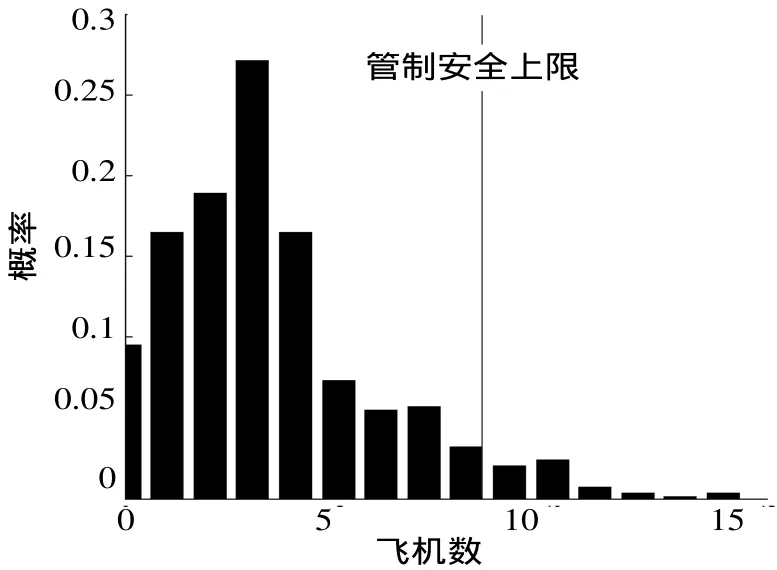
圖10 飛機數(shù)的概率分布(當(dāng)前扇區(qū))Fig.10 Plane probabitity distribution in the current sectors
2.2.2 全天扇區(qū)劃分有效性分析
空域扇區(qū)動態(tài)劃分目的是根據(jù)管制區(qū)內(nèi)交通情況的變化情況,確定不同的扇區(qū)劃分結(jié)構(gòu),在確保管制安全的基礎(chǔ)上,優(yōu)化配置管制資源,增加空域容量。圖11為基于北京管制區(qū)全天交通流量的扇區(qū)數(shù)目變化情況。在保證扇區(qū)內(nèi)的管制負荷在安全閾值之內(nèi)的前提下,扇區(qū)數(shù)目隨著交通流量的變化而變化,符合交通的變化趨勢。
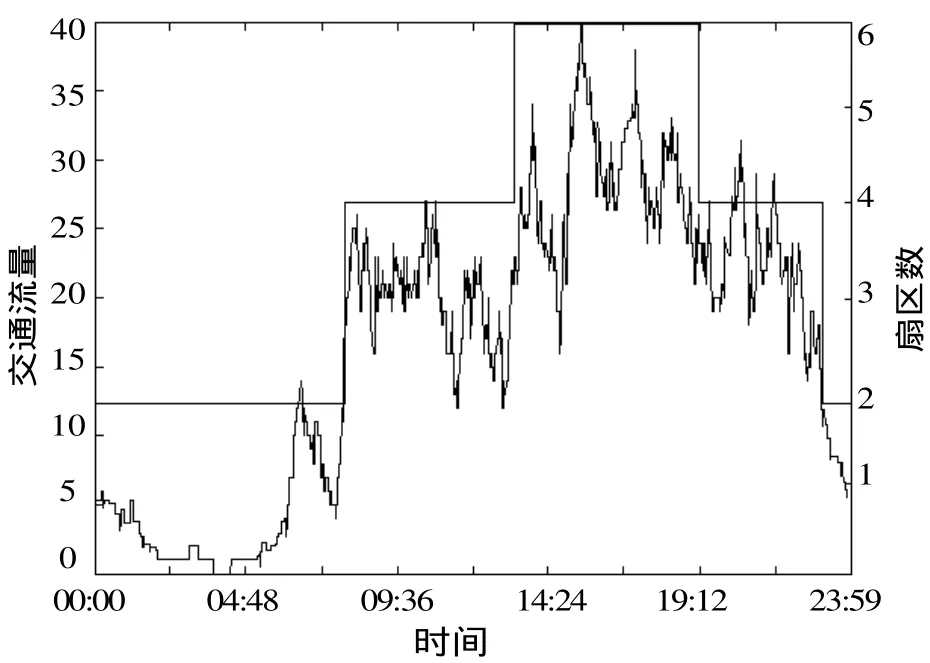
圖11 北京管制區(qū)交通流量及扇區(qū)數(shù)目變化曲線Fig.11 Curve between the traffic flow and the sector number change within Beijing traffic management district
基于本文中的扇區(qū)劃分方法對北京管制區(qū)的不同時間段進行扇區(qū)劃分。以 30 min為周期,計算每個周期內(nèi)的平均飛機數(shù)k,圖 12為劃分扇區(qū)全天的平均飛機數(shù)變化曲線。在空域較為繁忙的時間段,扇區(qū)的平均飛機數(shù)圍繞5波動,說明劃分后的扇區(qū)負荷較為均衡,且扇區(qū)數(shù)目的變化與交通流量的變化相符,優(yōu)化了扇區(qū)管制人員的資源優(yōu)化配置。全天安全概率 C = 9 9.63%,超過99%以上的時間管制區(qū)內(nèi)各扇區(qū)出現(xiàn)的最大飛機數(shù)不大于安全管制上限。作為對比,圖13描述了在當(dāng)前扇區(qū)劃分下全天的平均飛機數(shù)變化曲線,全天的扇區(qū)飛機平均數(shù)波動明顯(即使在扇區(qū)數(shù)目相同的高峰期內(nèi),也比同時間段劃分后的扇區(qū)平均飛機數(shù)曲線波動明顯)。由于扇區(qū)數(shù)目固定,雖然可以保證更多時間內(nèi)管制的安全性,但是,在交通流量較少的情況下,每個扇區(qū)內(nèi)管制員的管制負荷過小,浪費了管制資源。
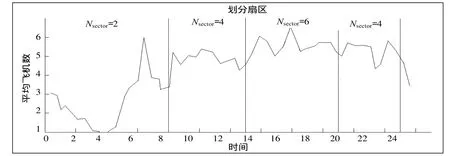
圖12 平均飛機數(shù)變化曲線(劃分扇區(qū))Fig.12 Change curve of the mean plane number in the divided sectors
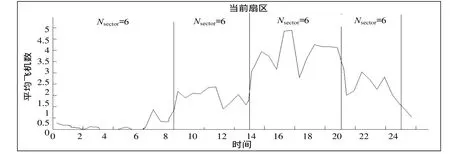
圖13 平均飛機數(shù)變化曲線(當(dāng)前扇區(qū))Fig.13 Change curve of the mean plane number in the current sectors
3 結(jié)束語
本文利用空域復(fù)雜性評估空域交通的特征,并通過密度和飛行態(tài)勢兩個指標(biāo)綜合量化交通特征。在此基礎(chǔ)上基于加權(quán)復(fù)雜網(wǎng)絡(luò)特征的K- means 聚類算法建立空域凸胞模型,將具有相似交通特征的空域區(qū)域聚為一類。基于該模型得到的扇區(qū)劃分不僅在一定程度上保證了扇區(qū)切換后扇區(qū)結(jié)構(gòu)在空間上的連續(xù)性,還減少了由于扇區(qū)劃分而產(chǎn)生的管制員交接負荷,提高了管制效率。本文中將提出的方法應(yīng)用于實際的空域(北京管制區(qū))中,與當(dāng)前的扇區(qū)結(jié)構(gòu)從扇區(qū)劃分的安全性和負荷均衡性等方面進行了分析對比,仿真結(jié)果證明了算法的有效性。
[1] Yousefi A., Donohue G. Temporal and spatial distribution of airspace complexity for air traffic controller workload-based sectorization[C]. Chicago:AIAA 4th Aviation Technology, Integration and Operations (ATIO) Forum, USA, AIAA Paper 2004-6455.
[2] Drew M., Analysis of an optimal sector design method[C]. The 27thDigital Avionics Systems Conference, 2008, IEEE/AIAA, St. Paul., USA,3.B.4-1-3.B.4-1-10.
[3] Xue M. Airspace sector redesign based on diagrams[J]. J. Aerospace Computing, Information,and Communication, 2009, (6): 624-634.
[4] Trandac H., Baptiste P., and Duong V. Optimized sectorization of airspace with constraints[C]. The 5th USA/Europe Air Traffice Management Research and Development Seminar. 2003,
[5] Li J. h., Wang T., Savai M. and Hwang I.Graph-based algorithm for dynamic airspace configuration[J]. Guidance, Control, and Dynamics,2010, 33(4): 1082-1095.
[6] Basu A., Mitchell J., and Sabhnani G. Geometric algorithms for optimal airspace design and air traffic controller workload balancing[J]. ACM Journal of Experimental Algorithmics, 2009, 14(2.3): 1-28.
[7] Tang J. J., Alam S., Lokan C., and Abbass H. A. A multi-objective approach for dynamic airspace sectorization using agent based and geometric models[J]. Transportation Research Part C: Emerging Technologies, 2012, 21(1): 89 - 121.
[8] Idris H., Delahaye D. Distributed trajectory flexibility preservation for traffic complexity mitigation traffic mitigation[C]. California: 8th USA/Europe ATM R&D Seminar, Napa, USA, 2009.
[9] Stefan G., Mihaela U. Complex networks as control paradigm for complex systems[C]. 2007 IEEE International Conference on Systems, Man, and Cybernetics. Canada Montreal, QC, 2007, 4069-4074.
[10] 趙 鵬, 耿煥同, 蔡慶生, 王清毅. 一種基于加權(quán)復(fù)雜網(wǎng)絡(luò)特征的K-means聚類算法[J]. 計算機技術(shù)與發(fā)展, 2007, 17(9): 35-40.
[11] Bi, H., Chen, Y.Z., Zhang D.F., Song Z. X.Optimization of airspace sectorization based on weighted graph and hybrid encoding genetic algorithm[C]. Beijing: The 12th COTA International Conference of Transportation Professionals. 2012,China: 1891-1902.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03