大型跟蹤測量雷達(dá)的衛(wèi)星標(biāo)定方法研究
2014-03-15 02:53:41張海成楊江平王晗中
雷達(dá)科學(xué)與技術(shù) 2014年5期
張海成,楊江平,王晗中
(1.空軍預(yù)警學(xué)院研究生管理大隊,湖北武漢430019;2.空軍預(yù)警學(xué)院陸基預(yù)警監(jiān)視裝備系,湖北武漢430019)
0 引言
雷達(dá)標(biāo)定是測量雷達(dá)保證測量精度的一項(xiàng)重要技術(shù)和手段。目前脈沖測量雷達(dá)廣泛采用的標(biāo)定方法主要有常規(guī)標(biāo)定、恒星標(biāo)定和衛(wèi)星標(biāo)定三種。常規(guī)標(biāo)定一般使用標(biāo)定塔、方位標(biāo)、標(biāo)校球[1]等設(shè)備,其優(yōu)點(diǎn)是穩(wěn)定性好,但是需建立標(biāo)校塔,因此移動性差,且全程人工干預(yù)較多,對雷達(dá)周圍環(huán)境要求較多;恒星標(biāo)定以恒星天體為基準(zhǔn)目標(biāo),通過微光電視等光學(xué)設(shè)備獲取測量數(shù)據(jù)解算雷達(dá)誤差,其優(yōu)點(diǎn)是標(biāo)定過程人工干預(yù)少,但是受天氣因素和空中遮擋影響大,且需支持的設(shè)備多。衛(wèi)星標(biāo)定方法由于設(shè)備要求簡單、標(biāo)定內(nèi)容全面、自動化程度較高,已成為大型跟蹤測量雷達(dá)主要的標(biāo)校手段。衛(wèi)星標(biāo)定是以運(yùn)行于空間近地軌道的人造地球衛(wèi)星為基準(zhǔn)目標(biāo),通過獲取衛(wèi)星精密軌道數(shù)據(jù)標(biāo)定雷達(dá)系統(tǒng)誤差,是目前較為先進(jìn)的雷達(dá)標(biāo)定技術(shù)。
常規(guī)標(biāo)定和恒星標(biāo)定的方法已廣泛應(yīng)用于我國航天測控網(wǎng)的脈沖測量雷達(dá)系統(tǒng),技術(shù)上比較成熟,而衛(wèi)星標(biāo)定技術(shù)在國內(nèi)的應(yīng)用還處于起步階段。美國、俄羅斯等國已經(jīng)廣泛采用衛(wèi)星標(biāo)定方法標(biāo)定其大型測量雷達(dá)、導(dǎo)彈預(yù)警雷達(dá)以及空間目標(biāo)監(jiān)視系統(tǒng)等[2-4],隨著我國脈沖測量雷達(dá)遠(yuǎn)程跟蹤、精密測量性能的不斷提高,衛(wèi)星標(biāo)定方法的深入研究以及工程需求也日益迫切,開展雷達(dá)衛(wèi)星標(biāo)定方法的研究,具有很重要的現(xiàn)實(shí)意義以及工程價值。
本文結(jié)合某雷達(dá)試驗(yàn)系統(tǒng)的工作模式及特點(diǎn),提出了適用于該雷達(dá)的衛(wèi)星標(biāo)定方法和模型,并對標(biāo)定結(jié)果進(jìn)行了仿真。
1 標(biāo)定方法及誤差模型
雷達(dá)測量誤差主要包括隨機(jī)誤差和系統(tǒng)誤差兩部分,隨機(jī)誤差通過平滑濾波可以得到抑制,系統(tǒng)誤差則需要進(jìn)行修正[5-6]。結(jié)合該雷達(dá)的工作模式和結(jié)構(gòu)特點(diǎn),經(jīng)過綜合分析,適用該雷達(dá)系統(tǒng)的誤差項(xiàng)主要有零值誤差、天線軸系誤差和電波折射誤差,由此建立誤差模型如下:
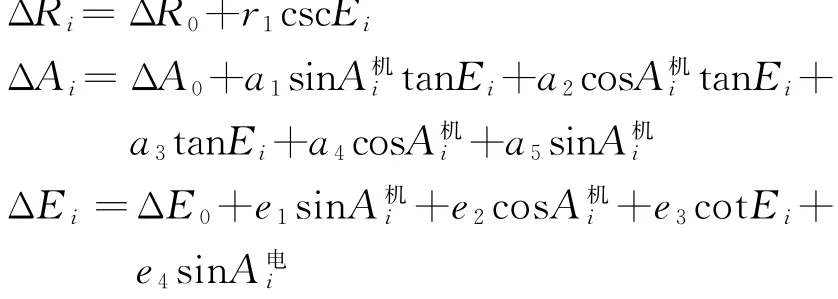
其中,ΔR i,ΔA i,ΔE i分別為衛(wèi)星的距離、方位和俯仰系統(tǒng)誤差量;ΔR0,ΔA0,ΔE0分別為距離、方位和俯仰零值;r1,e3分別為距離和俯仰角的電波折射修正殘余系數(shù);a4,a5為方位碼盤不均勻系數(shù);a1,e1,a2和e2分別為大盤不水平系數(shù);a3為俯仰電掃描的不鉛錘性引起的兩軸不正交誤差系數(shù);e4為方位電掃描的不水平性引起的兩軸不正交誤差系數(shù);A機(jī)i為測量時刻對應(yīng)的機(jī)械軸方位角;A電i為測量時刻對應(yīng)的電掃描方位角;i為觀測到的量測點(diǎn)編號。
該模型中,距離誤差包含距離零值誤差(ΔR0)和大氣折射引入的誤差(r1cscE i)。方位誤差包含方位零值誤差(ΔA0)、大盤不水平引入的誤差(a1sinA機(jī)itanE i+a2cosA機(jī)1tanE i)、俯仰電掃不鉛錘引入的兩軸不正交誤差(a3tanE i)以及方位碼盤不均勻(偏心)誤差(a4cosA機(jī)i+a5sinA機(jī)i)。俯仰誤差包含仰角零值誤差(ΔE0)、大盤不水平引入的誤差(e1sinA機(jī)i+e2cosA機(jī)i)、方位電掃不水平引入的兩軸不正交誤差(e4sinA電i)以及大氣折射引入的誤差(e3cotE i)。
衛(wèi)星標(biāo)定過程為:
(1)開始衛(wèi)星標(biāo)校后,首先獲取SLR星歷數(shù)據(jù)。星歷給出衛(wèi)星固定時間間隔的地心地固坐標(biāo)(ECEF坐標(biāo)),通過坐標(biāo)轉(zhuǎn)換可換算為以雷達(dá)陣地為原點(diǎn)的雷達(dá)站心坐標(biāo)(ENU坐標(biāo))。
(2)根據(jù)星歷計算在指定日期內(nèi)雷達(dá)可探測到的標(biāo)校衛(wèi)星,獲取可觀測衛(wèi)星的起始時間、結(jié)束時間、軌跡信息。并按照計算結(jié)果安排雷達(dá)觀測時間、指向。
(3)雷達(dá)獲取足夠的衛(wèi)星量測數(shù)據(jù)后,首先對數(shù)據(jù)進(jìn)行預(yù)處理,剔除異常值并進(jìn)行中心平滑及電波修正。
(4)根據(jù)雷達(dá)量測數(shù)據(jù),利用拉格朗日插值法計算對應(yīng)時間的衛(wèi)星真值。
(5)按照誤差模型進(jìn)行誤差系數(shù)解算。
(6)雷達(dá)獲取新的標(biāo)校衛(wèi)星量測數(shù)據(jù),并用解算結(jié)果對測量值進(jìn)行修正,再與真值比照。若誤差滿足要求則結(jié)束衛(wèi)星標(biāo)定;反之,重新進(jìn)行衛(wèi)星標(biāo)定。
其標(biāo)定過程如圖1所示。
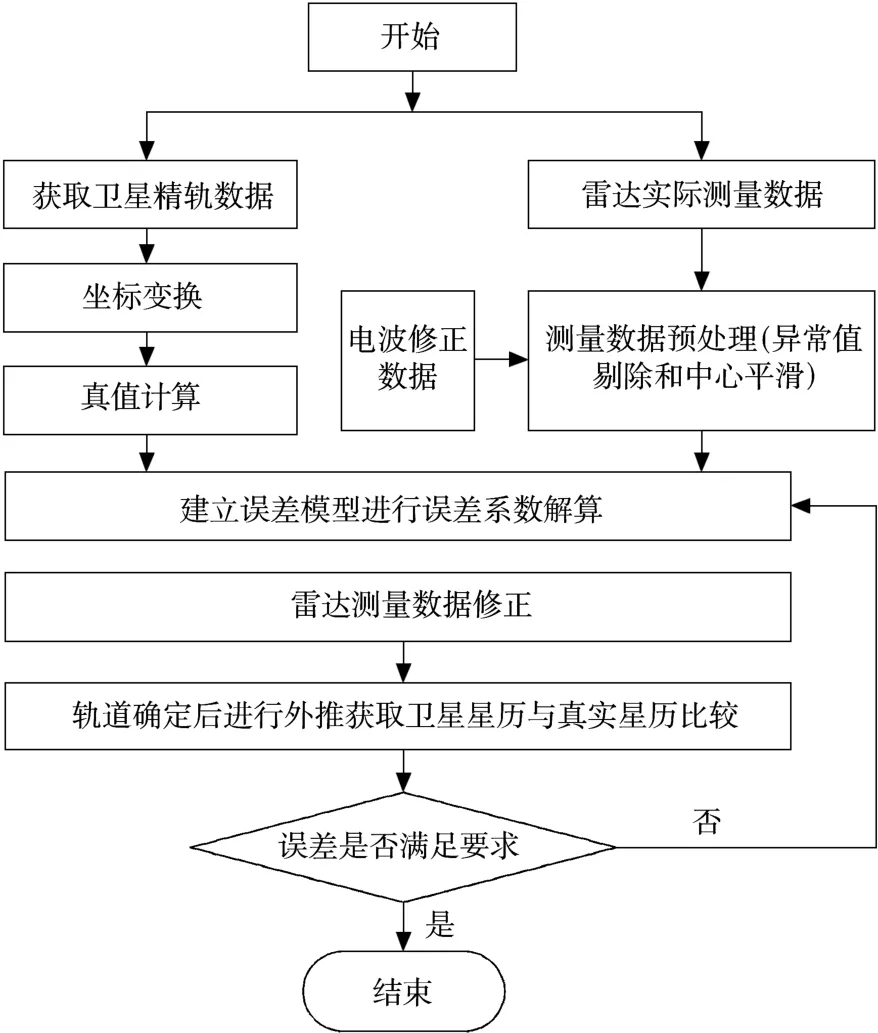
圖1 衛(wèi)星標(biāo)定過程
2 效果仿真
2.1 衛(wèi)星選擇
衛(wèi)星標(biāo)定時,雷達(dá)運(yùn)行于對應(yīng)的工作模式捕獲并跟蹤測量衛(wèi)星目標(biāo),獲取測量數(shù)據(jù);同時,獲取該衛(wèi)星對應(yīng)于雷達(dá)測量弧段的精密軌道數(shù)據(jù),將雷達(dá)測量數(shù)據(jù)與衛(wèi)星精軌數(shù)據(jù)進(jìn)行對比,利用最優(yōu)化算法解算雷達(dá)誤差系數(shù),達(dá)到校準(zhǔn)設(shè)備的目的。
選擇衛(wèi)星目標(biāo)需要重點(diǎn)從動態(tài)范圍和定軌精度兩方面考慮。標(biāo)定雷達(dá)設(shè)備的基準(zhǔn)數(shù)據(jù)和精軌數(shù)據(jù)精度應(yīng)至少優(yōu)于設(shè)備精度的1/3~1/5。從衛(wèi)星標(biāo)校條件和軸系標(biāo)定要求看,衛(wèi)星軌跡需要通過雷達(dá)周圍的四個象限(不必要求是同一顆衛(wèi)星軌跡)。因此,綜合考慮,我們選取的目標(biāo)衛(wèi)星從國際激光測距衛(wèi)星(SLR)中選取。
根據(jù)上述要求及雷達(dá)的精度指標(biāo)要求和所提供的SLR衛(wèi)星星歷,本文選取了主要的三顆目標(biāo)衛(wèi)星,采用STK軟件得到了衛(wèi)星的真實(shí)軌跡,采用最小二乘法解算雷達(dá)誤差模型系數(shù)。
2.2 結(jié)果分析
使用上節(jié)給出的模型和方法進(jìn)行求解,根據(jù)雷達(dá)參數(shù),設(shè)置不同場景條件下實(shí)際衛(wèi)星軌跡參數(shù),其中衛(wèi)星1編號為22824,軌道高度為815 km,軌道平面傾角為98.6°;衛(wèi)星2編號為27 944,軌道高度為691 km,軌道平面傾角為97.8°;衛(wèi)星3編號為27391,軌道高度為450 km,軌道平面傾角為89°。
解算結(jié)果如表1所示。

表1 雷達(dá)標(biāo)定系數(shù)求解結(jié)果
由上表對比結(jié)果可以看出,利用衛(wèi)星標(biāo)校方法解算的標(biāo)定系數(shù),其解算結(jié)果能夠保證一致性。
通過對三顆衛(wèi)星目標(biāo)進(jìn)行標(biāo)定前后的誤差對比計算,得到了相似的結(jié)果。其中,衛(wèi)星1的距離、方位角、俯仰角誤差在標(biāo)定前后誤差對比如圖2所示。
由圖2中的仿真試驗(yàn)結(jié)果可以看出,該雷達(dá)的主要系統(tǒng)誤差項(xiàng)通過衛(wèi)星標(biāo)定的方法基本消除了,標(biāo)定結(jié)果是穩(wěn)定收斂的,證實(shí)了該雷達(dá)采用衛(wèi)星標(biāo)定方法進(jìn)行系統(tǒng)誤差修正的正確性和合理性。
3 結(jié)束語
本文的研究表明,利用先進(jìn)的衛(wèi)星標(biāo)定方法對大型跟蹤測量雷達(dá)進(jìn)行系統(tǒng)誤差的標(biāo)定是合理有效并且完全可行的,標(biāo)定過程與雷達(dá)的正常工作程序相同,且標(biāo)定過程人工干預(yù)少,自動化程度高,受天氣和場地影響小,比常規(guī)的標(biāo)定方法方便、快捷,又能克服其他標(biāo)定方法存在的缺點(diǎn),是大型跟蹤測量雷達(dá)誤差標(biāo)定時采用的行之有效的方法,具有廣闊的工程應(yīng)用前景。
[1]文玲,高沅銘,常宇亮.基于標(biāo)校球的瞬態(tài)極化雷達(dá)校準(zhǔn)方法[J].雷達(dá)科學(xué)與技術(shù),2012,10(6):580-584.
[2]黃家貴,楊瀟.脈沖測量雷達(dá)衛(wèi)星標(biāo)校的實(shí)現(xiàn)[J].系統(tǒng)工程與電子技術(shù),2007,29(10):1600-1602.
[3]金勝,鄧穎麗,朱天林.脈沖測量雷達(dá)衛(wèi)星標(biāo)定方法研究[J].飛行器測控學(xué)報,2005,24(4):66-70.
[4]袁勇,李革,馬鵬斌,等.雷達(dá)的衛(wèi)星標(biāo)定技術(shù)方法[J].陜西科技大學(xué)學(xué)報,2008,26(4):109-113.
[5]劉利生.外側(cè)數(shù)據(jù)事后處理[M].北京:國防工業(yè)出版社,2000.
[6]費(fèi)業(yè)泰.誤差理論與數(shù)據(jù)處理(第6版)[M].北京:機(jī)械工業(yè)出版社,2010.
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
