基于非線性穩(wěn)定逆技術的水下滑翔機前饋控制器設計
2014-03-09 06:11:36劉雁集
艦船科學技術 2014年4期
孫 啟,馬 捷,楊 海,劉雁集
(1.上海交通大學海洋工程國家重點實驗室,上海 200240;2.中國船舶重工集團公司第七○一研究所,上海 201102)
基于非線性穩(wěn)定逆技術的水下滑翔機前饋控制器設計
孫 啟1,馬 捷1,楊 海2,劉雁集1
(1.上海交通大學海洋工程國家重點實驗室,上海 200240;2.中國船舶重工集團公司第七○一研究所,上海 201102)
針對具有非最小相不穩(wěn)定內部動態(tài)的水下滑翔機運動控制問題,采用基于穩(wěn)定逆技術的設計方法設計了前饋控制器。水下滑翔機在有限時間內的穩(wěn)態(tài)間轉換過程,被視作兩點邊值問題。將一種新型前饋控制器設計方法拓展,應用于非線性多輸入多輸出水下滑翔機系統(tǒng);利用兩點邊值條件,為前饋控制器設計了期望輸出軌跡。仿真結果表明,在設計的前饋控制器作用下,滑翔機內部動態(tài)的解,不僅是有界的,而且是因果的;通過選定合適的轉換時間,可以滿足滑翔機系統(tǒng)的輸入輸出限制,降低對控制輸入激勵的需求。
水下滑翔機;非線性穩(wěn)定逆技術;前饋控制;運動控制
0 引言
作為將浮標和水下機器人技術結合而成的新型水下機器人,水下滑翔機由自身的凈浮力和機翼產生的水動力進行驅動,通過間歇性改變自身凈浮力的大小和重心的位置,實現(xiàn)鋸齒狀的航行運動。水下滑翔機的凈浮力和重心位置改變是間歇的,具有能耗小、噪聲低的特點。它適用于長期、大范圍的軍事探測和海洋環(huán)境監(jiān)測。
1989年,Henry Stommel提出了利用一種能夠在水下滑翔運動的浮標進行海洋環(huán)境研究的設想[1]。2001年以來,在美國海軍研究局 (ONR)的資助下,先后出現(xiàn)了 Slocum Electric/thermal Glider,Spray,Seaglider[2-4],并均已應用于實際的海洋科考中。2006年,美國以滑翔機為支撐平臺,建立了持久性的濱海海底監(jiān)測網絡。2007年,美國Bedford MA公司利用碳纖維設計耐壓殼,使Deepglider能夠下潛6 000 m。
對于水下滑翔機的運動控制,在滑翔機垂直動力學模型和控制分析方面,美國普林斯頓大學的 Leonard[5-6]基于航空滑翔機的原理建立了水下滑翔機動力學模型,給出了水動力在小攻角滑翔時的近似表達式,并基于實驗滑翔機ROGUE的線性化模型,借助線性二次最優(yōu)控制 (LQR)方法,設計了滑翔機在垂直面不同俯仰角間的切換控制算法。Graver[7]系統(tǒng)分析了滑翔機的結構和水下運動特性,并提出了滑塊加速度控制模式。Nina等[8]用PID控制算法設計了前饋/反饋控制器,并做了仿真分析。葛暉等[9]基于廣義的 d'Alembert方程推導出變質心控制的水下滑翔機動力學方程,并進行垂直面的彈道仿真。王延輝[10]利用吉布斯–阿佩爾方程建立水下滑翔機的動力學模型,分析偏心質量塊和平移質量塊的共同作用對滑翔機運動的影響,并分析滑翔機三維空間運動和垂直剖面運動的特性。
滑翔機的切換控制是在到達指定深度后由下潛(上浮)狀態(tài)切換到上浮 (下潛)狀態(tài)。Kraus等[11]將最優(yōu)控制引入到滑翔機的潛浮切換運動過程中,以浮力變化率和攻角變化作為最優(yōu)控制的目標,將滑翔機的速度、攻角、浮力3個變化量作為狀態(tài)量,基于哈密爾頓函數(shù)建立離散的切換控制模型,將潛浮切換運動轉換為兩點邊值問題,設計基于逆系統(tǒng)的前饋控制器。
逆系統(tǒng)方法是比較直觀實用的非線性方法,廣泛應用于工業(yè)機器人控制、過程控制及航天飛行器控制等一些領域[12-13]。
系統(tǒng)Σ的逆系統(tǒng)Π,是指以系統(tǒng)Σ的期望輸出y*(t)作為系統(tǒng)Π的輸入來產生原系統(tǒng)Σ的控制輸入u*(t),以驅動原系統(tǒng),使原系統(tǒng)的輸出y(t)與預設期望輸出y*(t)一致,即y(t)=y*(t)。
本文基于水下滑翔機的非線性動力學模型,分析其逆系統(tǒng)的動態(tài)特性,利用適用于非最小相非線性系統(tǒng)的穩(wěn)定逆技術對逆系統(tǒng)的期望輸入軌跡進行設計,使系統(tǒng)的狀態(tài)軌跡和控制輸入的解是有界和因果的,并對比分析不同轉換時間對期望輸出軌跡的影響,選擇合適的轉換時間。
1 水下滑翔機數(shù)學模型
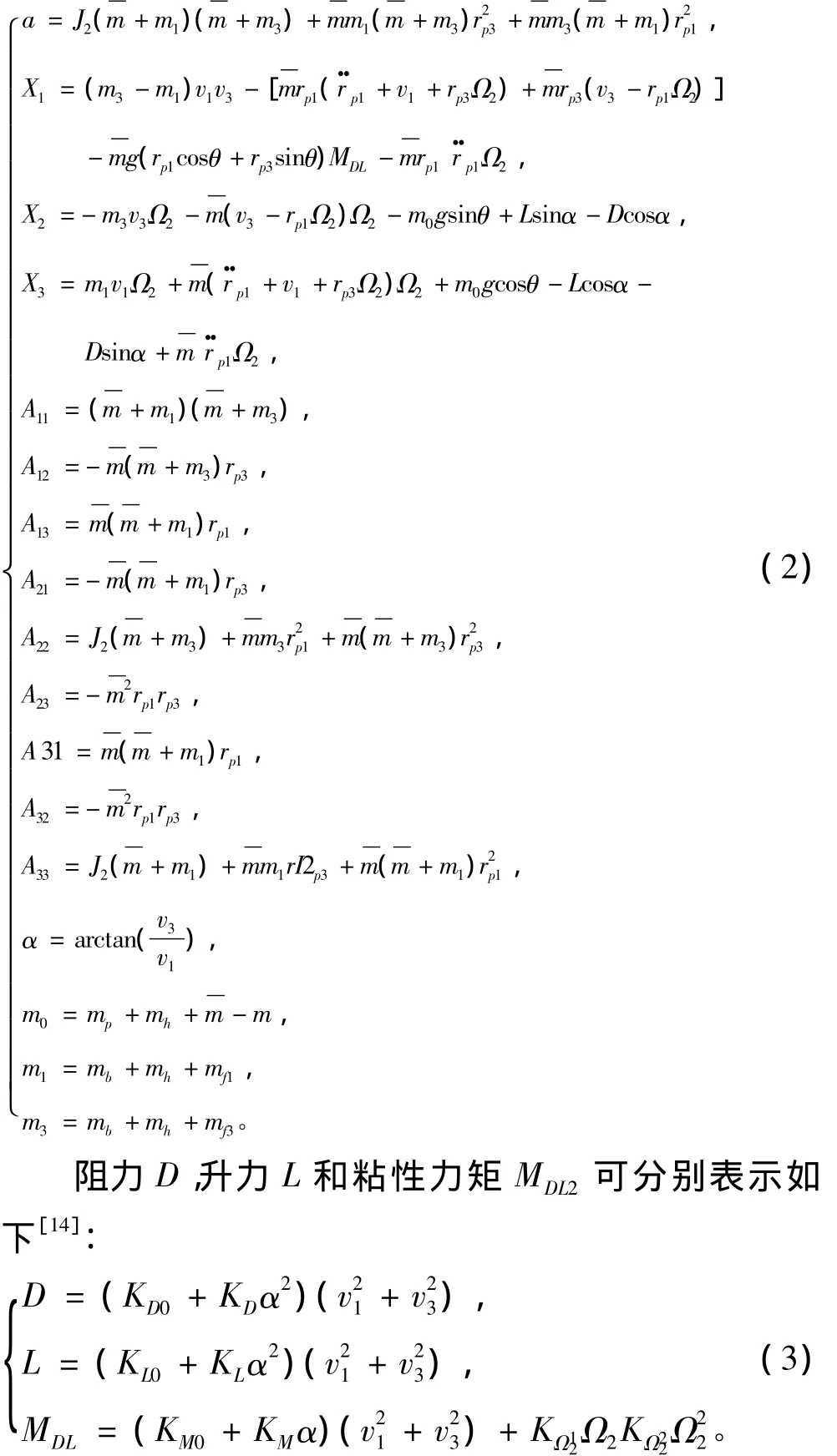
針對水下滑翔機垂直面內的潛浮切換運動,現(xiàn)將滑翔機質量分為均勻分布的滑翔機機殼質量mh,可變的浮力調節(jié)質量mb,位移可移動的定質量塊三部分。建立如圖1所示的動坐標系O'(e1,e2)和慣性坐標系O(i,k)。

圖1 滑翔機動坐標系和靜坐標系Fig.1 Underwater glider inertial frame and body frame
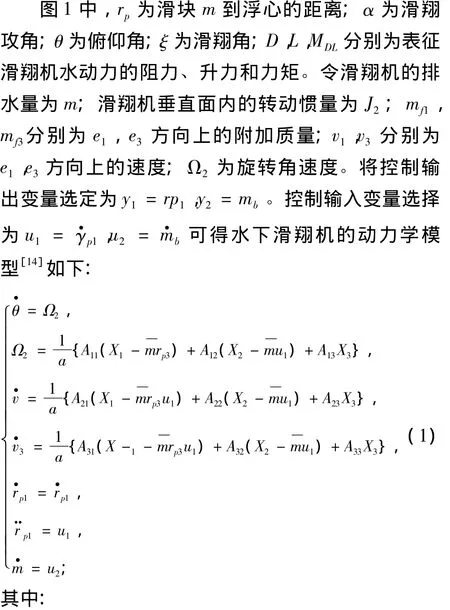
由式(1)可見,水下滑翔機的動力學模型是一個多變量、非線性、耦合的系統(tǒng)。它是一個7階的系統(tǒng),具有5個獨立的輸出變量而只有2個獨立的輸入變量,因此該系統(tǒng)還欠驅動。
2 基于穩(wěn)定逆技術的前饋控制器設計
2.1 水下滑翔機逆系統(tǒng)
水下滑翔機是通過滑動質量塊和改變浮力來進行運動控制,為便于規(guī)劃其變化軌跡,選擇滑塊的位置和可變質量作為控制對象,即控制輸出變量:
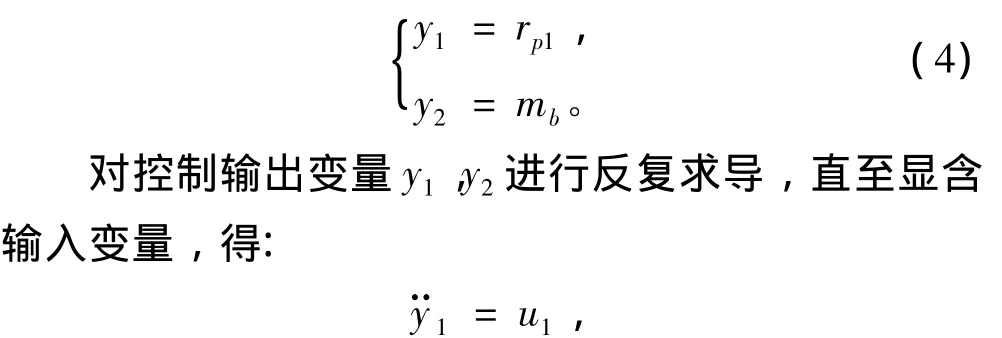
2.2 兩點邊值問題
在有限時間間隔t∈[0,T]內,水下滑翔機平衡狀態(tài)之間的轉換意味著,方程(7)的解必須滿足以下邊界條件:
期望輸出軌跡和預設軌跡均滿足式(8)中的邊界條件,因此,變異函數(shù) y~(t,p)也要滿足以下邊界條件:
3 仿真研究
為了驗證本文所設計的非線性前饋與反饋控制器在處理非最小相系統(tǒng)方面的有效性,以水下滑翔機由25°下潛運動向25°上浮運動的轉換過程為例。仿真試驗中水下滑翔機運動參數(shù)如表1所示。
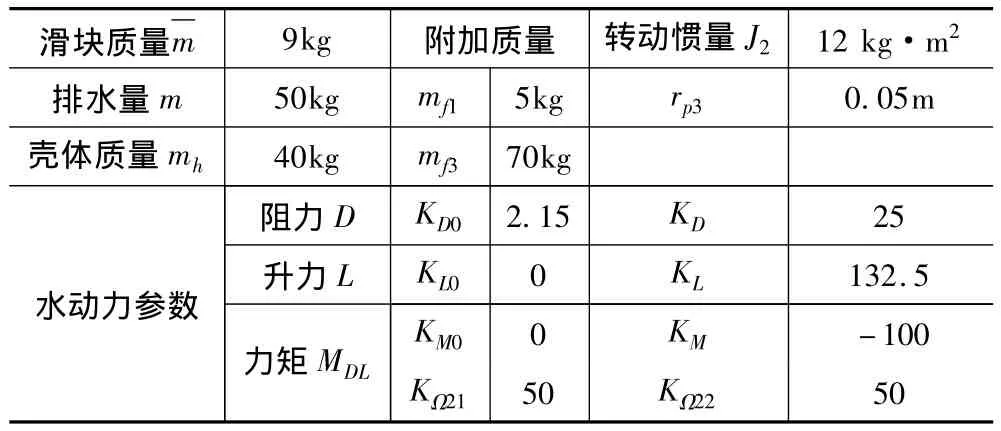
表1 滑翔機參數(shù)Tab.1 Underwater glider simulation parameter values
以上這些數(shù)據(jù)的選取和確定參照Slocum Electric Glider[2],由于所設計水下滑翔機的外形和 Slocum Electric Glider相似,考慮到本文是對前饋控制器的期望輸出軌跡進行設計,驗證在所起設計的期望輸出軌跡的驅動下,滑翔機逆系統(tǒng)的內部動態(tài)穩(wěn)定和有界,參數(shù)值誤差對本文結果的影響可以忽略。
圖2~圖7是轉換時間T分別為30 s,45 s,60 s時逆系統(tǒng)內部狀態(tài)變量的軌跡、期望輸出軌跡以及前饋控制輸出軌跡。不同轉換時間下自由參數(shù)p=[p11p12;p21p22]值選取如下[16]。
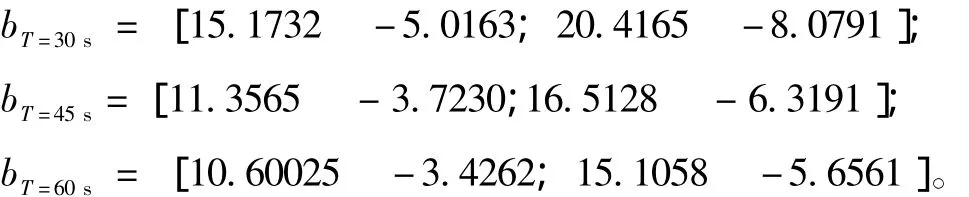
這3組數(shù)據(jù)代表了轉換時間分別為T=30 s,T=45 s,T=60 s時,利用Matlab函數(shù)bvp4c計算的自由參數(shù)值。
圖2和圖3是水下滑翔機逆系統(tǒng)在預設期望輸出軌跡的驅動下內部動態(tài)的變化曲線。結果表明,內部動態(tài)的解均有界。圖2中俯仰角θ的變化曲線還表明,系統(tǒng)成功實現(xiàn)了由穩(wěn)定下潛狀態(tài)到穩(wěn)定上浮狀態(tài)的切換。
由圖中各變量曲線變化的趨勢看,不同內部動態(tài)曲線在同轉換時間下的走勢相同,雖然變化的幅度和時間長度有所差異,分別是:隨著轉換時間的增加,俯仰角θ的變化越來越緩慢,v1的峰值也隨之增加,v3的峰值變化很小,但波形很相似,且均依賴于初始狀態(tài)和目標狀態(tài)值。這進一步表明,內部動態(tài)的解是因果的。
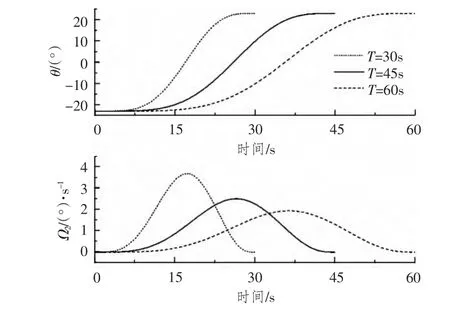
圖2 不同轉換時間下俯仰角及角速度變化軌跡Fig.2 Trajectories of the pitch angle and the angular velocity under different transition times
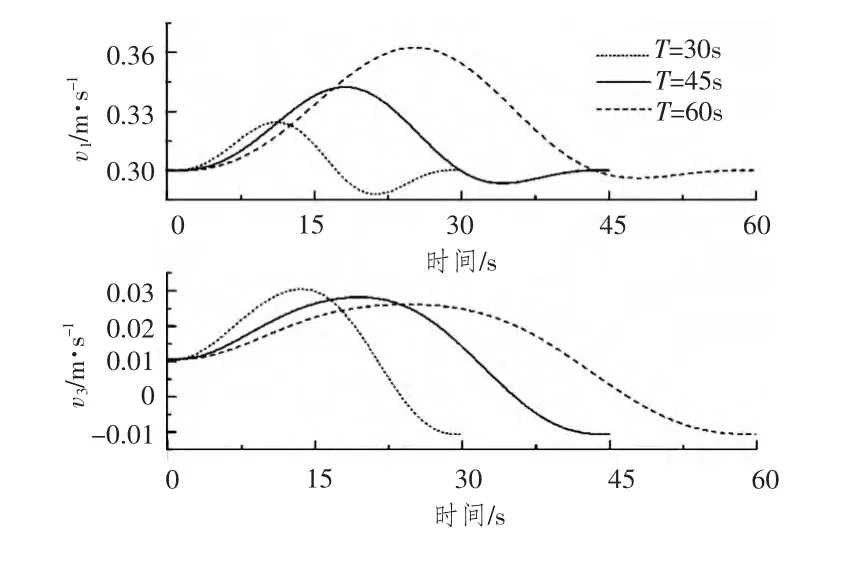
圖3 不同轉換時間下平移速度變化軌跡Fig.3 Trajectories of the translational velocity under different transition times
另外,還能看出圖3中速度v3的變化并非直接從0.01 m/s減小到0再到-0.01 m/s,而是1個先加速再減速的過程。
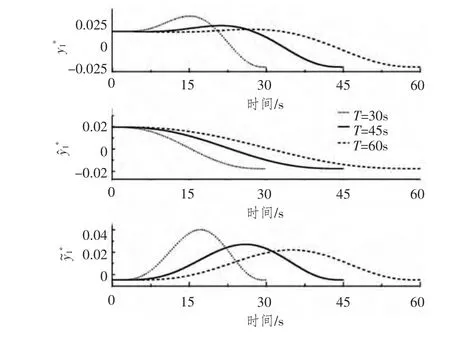
圖4 不同轉換時間下輸出變量rp1軌跡Fig.4 Trajectories of the outputs of rp1 under different transition times
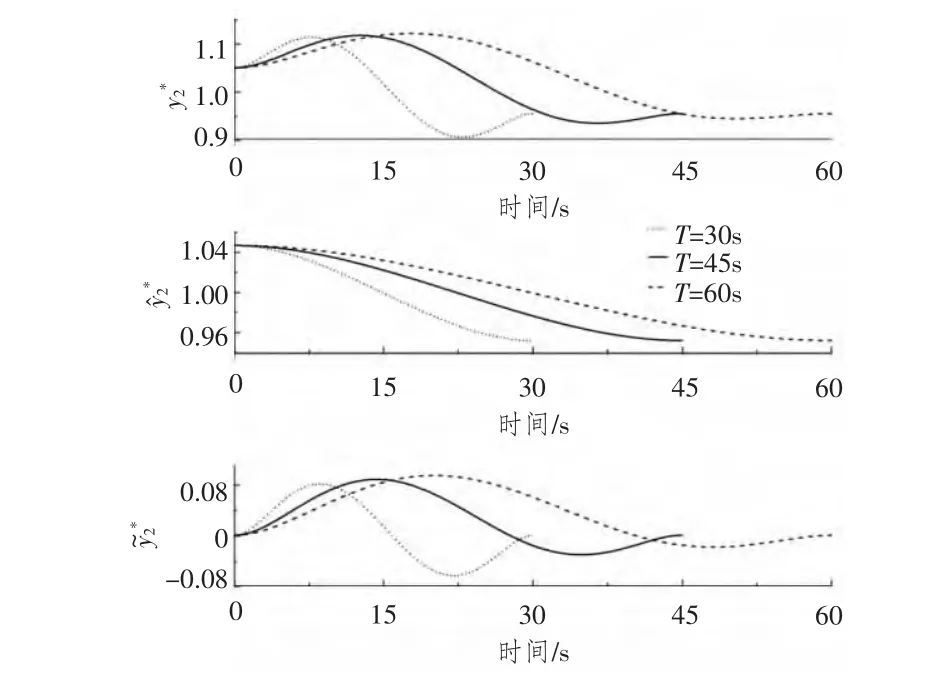
圖5 不同轉換時間下輸出變量mb軌跡Fig.5 Trajectories of the outputs of mb under different transition times
圖6還表明,期望輸出軌跡雖然在不同的轉換時間下變化趨勢相同,但其超出邊界值的程度不同,這在滑塊位移rp1上體現(xiàn)得最為明顯。這對滑塊的位移和浮力系統(tǒng)調節(jié)機構的選擇具有指導意義。
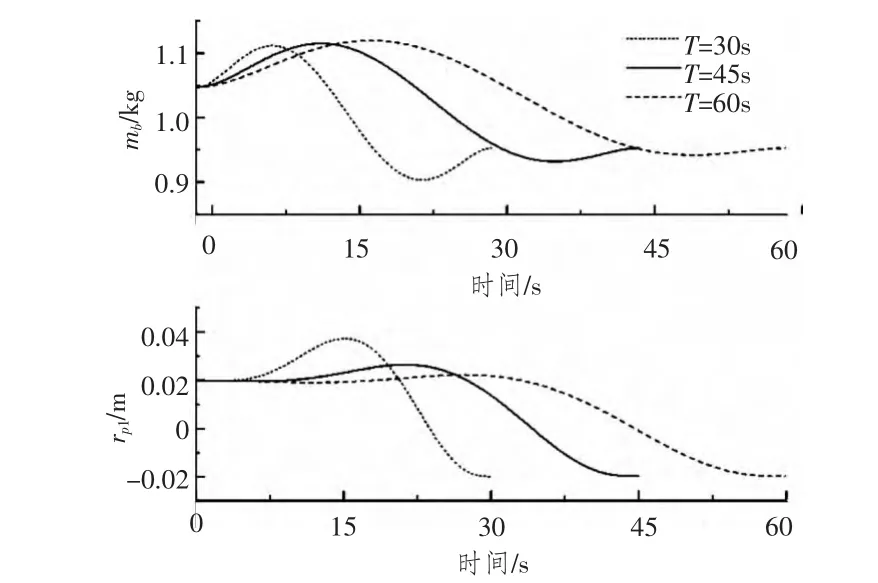
圖6 不同轉換時間下輸出變量軌跡Fig.6 Trajectories of the outputs under different transition times
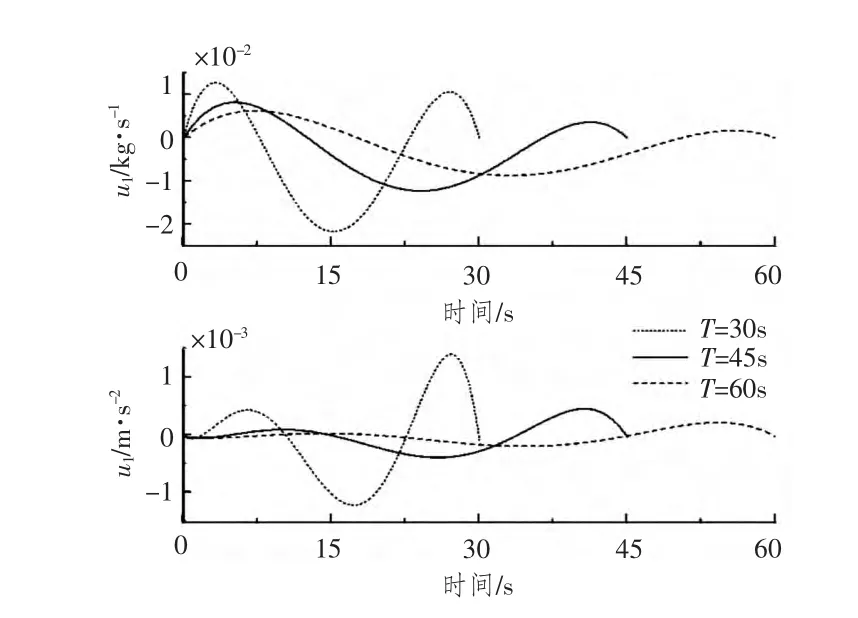
圖7 不同轉換時間下控制輸入軌跡Fig.7 Trajectories of the control inputs under different transition times
圖7更為直接地表明了逆系統(tǒng)求得的滑翔機系統(tǒng)控制輸入激勵u*=[]T在不同轉換時間下的變化趨勢。當轉換時間由30 s變?yōu)?0 s時,轉換時間加倍,而2個控制輸入激勵峰值分別降為原來峰值的16.7%和49.3%。實際中,滑翔機潛浮 (浮潛)切換控制能量消耗約占總的能量需求的50%~70%,選擇合理的轉換時間,可以降低系統(tǒng)的控制輸入激勵。由于水下滑翔機自身攜帶的動力有限,節(jié)省能量就可以增加滑翔機的有效航程。
通過調整轉換時間來改變控制輸入激勵峰值容易實現(xiàn)。因此,以上結果看作為實際應用的參考,同時考慮到在復雜的海洋環(huán)境中,滑翔機系統(tǒng)應當能在較短時間內完成潛浮 (浮潛)狀態(tài)切換控制,選擇40~50 s作為系統(tǒng)轉換時間比較合理。
4 結語
本文建立了描述水下滑翔機潛浮 (浮潛)切換運動的動力學模型,將水下滑翔機兩穩(wěn)態(tài)點之間的轉換視作兩點邊值問題,基于新的非線性系統(tǒng)前饋控制設計方法,對前饋控制器的期望輸出軌跡進行設計。
針對水下滑翔機運動模型逆系統(tǒng)為非最小相非線性多輸入多輸出系統(tǒng),將期望輸出軌跡分成預設輸出軌跡和含有自由參數(shù)的變異輸出軌跡,預設輸出軌跡實現(xiàn)系統(tǒng)從初始狀態(tài)到目標狀態(tài)的切換,變異輸出軌跡通過增加自由參數(shù)來實現(xiàn)系統(tǒng)狀態(tài)解是有界和因果的。
結果表明:在設計期望輸出軌跡作用下,滑翔機逆系統(tǒng)成功實現(xiàn)從初始狀態(tài)到目標狀態(tài)的轉換,控制輸出和內部動態(tài)變量均是有界和因果的;切換過程轉換時間直接影響切換轉換性能,轉換時間的增加削弱變異軌跡的影響,表現(xiàn)為俯仰角轉換速度變慢,控制輸入激勵的峰值降低和期望控制輸入變量超出邊界的值降低,合理的選擇切換控制的轉換時間為40~50 s,能減低系統(tǒng)能耗,這意味著增大水下滑翔機有效航程。同時,設計期望輸出軌跡的曲線變化也為進一步進行重心和浮力調節(jié)機構的設計提供了依據(jù)。
[1]STOMMELH.The slocum mission[J].Oceanography,1989,2(1):22-25.
[2]WEBB D C,SIMONETTI P J,JONES C P.SLOCUM:An underwater glider propelled by environmental energy[J].Oceanic Engineering,IEEE Journal of,2001,26(4):447-452.
[3]SHERMAN J,et al.The autonomous underwater glider[J].Oceanic Engineering,IEEE Journal of,2001,26(4):437-446.
[4]ERIKSEN C C,et al.Seaglider:A long-range autonomous underwater vehicle for oceanographic research[J].IEEE Journal of Oceanic Engineering,2001,26(4):424 -436.
[5]GRAVER J G,LEONARD N E.Underwater glider dynamics and control[C].12th International Symposium on Unmanned Untethered Submersible Technology,2001.
[6]LEONARD N E,GRAVER J G.Model-based feedback control of autonomous underwater gliders[J].IEEE Journal of Oceanic Engineering,2001,26(4):633 -645.
[7]GRAVER JG.Underwater gliders:dynamics,control and design,2005 Citeseer.
[8]MAHMOUDIAN N,WOOLSEY C.Underwater glider motion control[C].Proceeding of the 47th IEEEConference,2008.
[9]葛暉,徐德民,周秦英.基于變質心控制的低速水下航行器動力學建模[J].機械科學與技術,2007(3):327-331.
[10]王延輝,水下滑翔器動力學行為與魯棒控制策略研究[D].天津:天津大學,2007.
[11]KRAUSR,CLIFF E,WOOLSEY C,et al.Optimal control of an undersea glider in a symmetric pull-up[C].International Symposium on Mathematical Theory of Networks and Systems(MTNS),Blacksburg,VA.2008.
[12]DEVASIA S,CHEN D,PADEN B.Nonlinear inversionbased output tracking[J].IEEE Transactions on,Automatic Control,1996,41(7):930 -942.
[13]GRAICHEN K,HAGENMEYER V,ZEITZ M,A new approach to inversion-based feedforward control design for nonlinear systems[J].Automatica,2005,41(12):2033-2041.
[14]BHATTA P,LEONARD N E.Stabilization and coordination of underwater gliders[C].Proceedings of the 41st IEEE Conference,2002.
[15]PIAZZIA,VISIOLIA.Optimal noncausal set-point regulation of scalar systems[J].Automatica,2001,37(1):121 -127.
[16]YANG H,MA J.Nonlinear feedforward and feedback control design for autonomous underwater glider[J].Journal of Shanghai Jiaotong University(Science),2011,16(1):11 -16.
Nonlinear feed-forward control design for autonomous underwater glider based on stable-inversion technique
SUN Qi1,MA Jie1,YANG Hai2,LIU Yan-ji1
(1.Shanghai Jiaotong University,State key laboratovy of Ocean Engineering,Shanghai200240,China;2.The 701 Research Institute of CSIC,Shanghai201102,China)
In order to solve the underwater glidermotion control problem with unstable nonminimum phase dynamic,a feed-forward controller was designed based on nonlinear stable-inversion technique.The presented approach treats the considered finite-time transition as a two-point boundary value problem and yields causal feed-forward trajectory,which are constant outside the transition interval.The simulation results validate thata causal and bounded solution were obtained for the internal dynamics,furthermore,the inputs and outputs could be satisfied through changing transition time.
underwater glider;nonlinear stable inversion;feed-forward control;motion control
U674.83TP242.6
A
1672-7649(2014)04-0087-06
10.3404/j.issn.1672-7649.2014.04.017
2012-11-21;
2012-12-26
國家自然科學基金資助項目(50979058)
孫啟(1988-),男,碩士研究生,主要研究方向為船舶舵機控制及水下熱滑翔機運動控制。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17