無(wú)人滑行艇橫搖運(yùn)動(dòng)模式實(shí)驗(yàn)分析
2014-03-09 05:54:30楊旺林徐海通楊松林
艦船科學(xué)技術(shù) 2014年4期
楊旺林,徐海通,楊松林,張 勝
(江蘇科技大學(xué)船舶與海洋工程學(xué)院,江蘇鎮(zhèn)江 212003)
無(wú)人滑行艇橫搖運(yùn)動(dòng)模式實(shí)驗(yàn)分析
楊旺林,徐海通,楊松林,張 勝
(江蘇科技大學(xué)船舶與海洋工程學(xué)院,江蘇鎮(zhèn)江 212003)
以1艘無(wú)人滑行艇為模型,在船模不同吃水和傾斜角度的情況下進(jìn)行橫搖衰減試驗(yàn),得到一系列橫搖角速度變化曲線。分別建立線性、非線性橫搖衰減運(yùn)動(dòng)模式系統(tǒng)辨識(shí)的數(shù)學(xué)模型,以系統(tǒng)辨識(shí)原理為基礎(chǔ),確立目標(biāo)函數(shù)。改編基于Visual Basic 6.0的遺傳算法系統(tǒng)辨識(shí)程序,通過(guò)2種系統(tǒng)對(duì)無(wú)人滑行艇橫搖的試驗(yàn)數(shù)據(jù)分別進(jìn)行辨識(shí),驗(yàn)證所改編程序的可行性。選取典型的小角度和大角度的辨識(shí)結(jié)果,對(duì)2種數(shù)學(xué)模型下的辨識(shí)結(jié)果進(jìn)行比較。得出對(duì)于無(wú)人滑行艇,非線性數(shù)學(xué)模型的辨識(shí)結(jié)果較好的結(jié)論。
無(wú)人滑行艇;橫搖運(yùn)動(dòng)模式;船模試驗(yàn);系統(tǒng)辨識(shí)
0 引言
滑行艇在高速航行時(shí),僅部分艇底接觸水面,其重量大部分靠水動(dòng)力作用產(chǎn)生的升力支承。當(dāng)滑行艇處于滑行狀態(tài)時(shí),吃水遠(yuǎn)小于靜浮狀態(tài),遇到?jīng)皾龝r(shí)會(huì)發(fā)生嚴(yán)重的顛簸,有時(shí)還會(huì)出現(xiàn)在2個(gè)波峰間飛躍的現(xiàn)象[1]。目前,對(duì)滑行艇的運(yùn)動(dòng)預(yù)報(bào)多集中在阻力和升力方面[2-4]。對(duì)于滑行艇水動(dòng)力分析的方法主要有實(shí)驗(yàn)分析和數(shù)值模擬2種[5]。
橫搖是船舶在波浪中最容易發(fā)生的運(yùn)動(dòng)形式,而且在各種搖蕩運(yùn)動(dòng)中幅值最大。因此對(duì)于滑行艇橫搖運(yùn)動(dòng)的預(yù)報(bào)同樣很重要。模型試驗(yàn)是預(yù)報(bào)橫搖運(yùn)動(dòng)的有效方法。而基于優(yōu)化的系統(tǒng)辨識(shí)方法在三體船模、五體船模及復(fù)合型船模橫搖運(yùn)動(dòng)[6-9]實(shí)驗(yàn)分析中均得到較為理想的應(yīng)用。
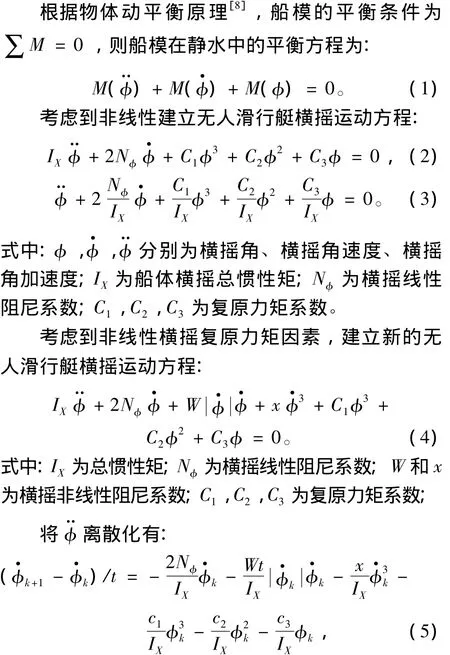
本文對(duì)無(wú)人滑行艇模型橫搖運(yùn)動(dòng)模式的實(shí)驗(yàn)分析,根據(jù)橫搖中動(dòng)平衡原理,建立線性和非線性2種橫搖衰減運(yùn)動(dòng)模式的數(shù)學(xué)模型,分別確定相關(guān)設(shè)計(jì)變量及目標(biāo)函數(shù),改編基于Visual Basic 6.0遺傳算法系統(tǒng)辨識(shí)程序。通過(guò)2種系統(tǒng)對(duì)無(wú)人滑行艇橫搖的試驗(yàn)數(shù)據(jù)分別進(jìn)行辨識(shí)。根據(jù)實(shí)驗(yàn)曲線和辨識(shí)曲線的較好擬合情況、較小的辨識(shí)相對(duì)誤差,驗(yàn)證所改編程序的可行性。根據(jù)所選小角度及大角度情況下,非線性數(shù)學(xué)模型辨識(shí)結(jié)果較好,得出非線性數(shù)學(xué)模型更適合于分析滑行艇靜水橫搖衰減運(yùn)動(dòng)的結(jié)論。
1 無(wú)人滑行艇實(shí)驗(yàn)?zāi)P图皩?shí)驗(yàn)內(nèi)容
1.1 實(shí)驗(yàn)?zāi)P?/h3>
本次實(shí)驗(yàn)選用江蘇科技大學(xué)船模室的1艘無(wú)人滑行艇模型,其主尺度見(jiàn)表1,橫剖面見(jiàn)圖1。
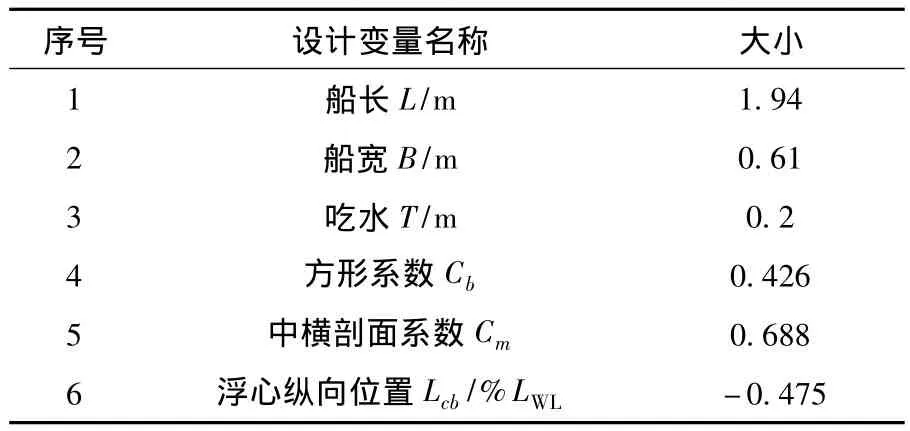
表1 無(wú)人滑行艇模型尺度參數(shù)Tab.1 Unmanned planing boatmodel scale parameter
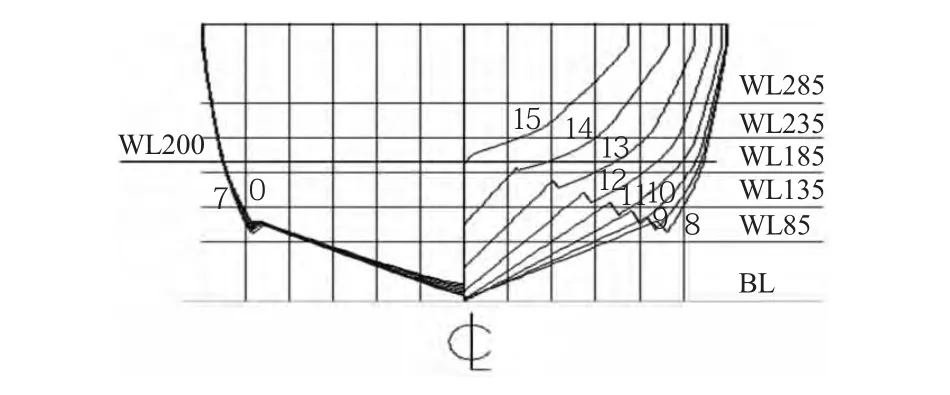
圖1 無(wú)人滑行艇模型橫剖面圖Fig.1 The Cross-sectional view of the Unmanned planing boatmodel
1.2 實(shí)驗(yàn)內(nèi)容
試驗(yàn)在江蘇科技大學(xué)波浪水池中進(jìn)行。其步驟如下:
1)將船模放置于水池中遠(yuǎn)離池壁,使船模處于正浮狀態(tài),待船模穩(wěn)定后讀取船模的初始角度;
2)給船模施加外力,使船模向一側(cè)傾斜角度φ(5°,10°,15°,20°),釋放外力的同時(shí)利用 Mti- G軟件開(kāi)始采集數(shù)據(jù),船模自由橫搖直到再次穩(wěn)定后停止采集數(shù)據(jù)。讀取Mti-G軟件讀取的橫搖角度數(shù)據(jù);
3)變化船模排水量 (0.029 56m3,0.049 56m3),重復(fù)步驟1和步驟2;
MTi-G是1個(gè)集成GPS信號(hào)的微型慣性測(cè)量系統(tǒng)。通過(guò)內(nèi)部微處理器的處理,輸出姿態(tài)和航向信息。通過(guò)實(shí)時(shí)卡爾曼濾波提供準(zhǔn)確的位置和速度信息。
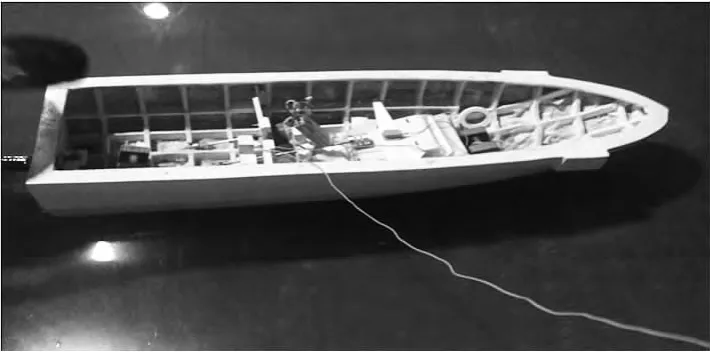
圖2 無(wú)人滑行艇橫搖自由衰減實(shí)驗(yàn)Fig.2 The hydrostatic experiment of roll

圖3 MTi-G微型AHRS慣性測(cè)量系統(tǒng)Fig.3 Mti-GMicro AHRSSystem
2 無(wú)人滑行艇橫搖運(yùn)動(dòng)辨識(shí)模型及辨識(shí)方法
基于以上數(shù)學(xué)模型,改編基于Visual Basic 6.0的遺傳算法系統(tǒng)辨識(shí)程序。遺傳參數(shù)的設(shè)定采用實(shí)數(shù)編碼,每個(gè)基因長(zhǎng)度為20,初始種群數(shù)為300,迭代次數(shù)為4 000,交叉率為0.8,變異率為0.10。
3 實(shí)驗(yàn)結(jié)果分析
3.1 分析方案
以線性、非線性數(shù)學(xué)模型的辨識(shí)系統(tǒng),分別對(duì)初始傾角為5°,10°,15°,20°時(shí)所采集數(shù)據(jù)進(jìn)行系統(tǒng)辨識(shí),獲得辨識(shí)數(shù)據(jù)。將所獲辨識(shí)數(shù)據(jù)分別與相應(yīng)實(shí)驗(yàn)數(shù)據(jù)擬合。
1)選取初始傾角5°,20°,分別作為小角度和大角度橫傾的代表。
2)在初始傾角為5°時(shí),對(duì)比2個(gè)數(shù)學(xué)模型即線性、非線性的辨識(shí)、擬合結(jié)果,以擬合曲線和相對(duì)誤差為對(duì)比標(biāo)準(zhǔn)。
3)在初始傾角為20°時(shí),對(duì)比2個(gè)數(shù)學(xué)模型即線性、非線性的辨識(shí)、擬合結(jié)果,以擬合曲線和相對(duì)誤差為對(duì)比標(biāo)準(zhǔn)。
4)分析以上對(duì)比得出結(jié)論。
5)對(duì)結(jié)論作初步理論說(shuō)明。
3.2 分析過(guò)程
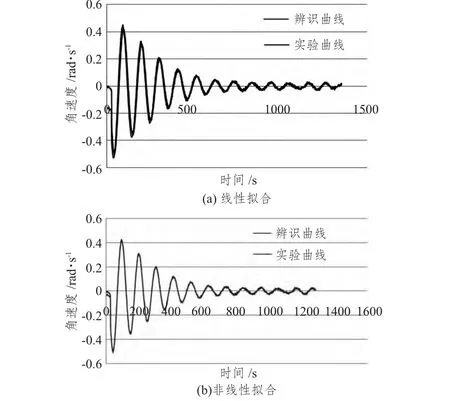
圖4 5°自由橫搖衰減時(shí)對(duì)角速度曲線Fig.4 Roll angular velocity decay correspond to angular velocity at5°
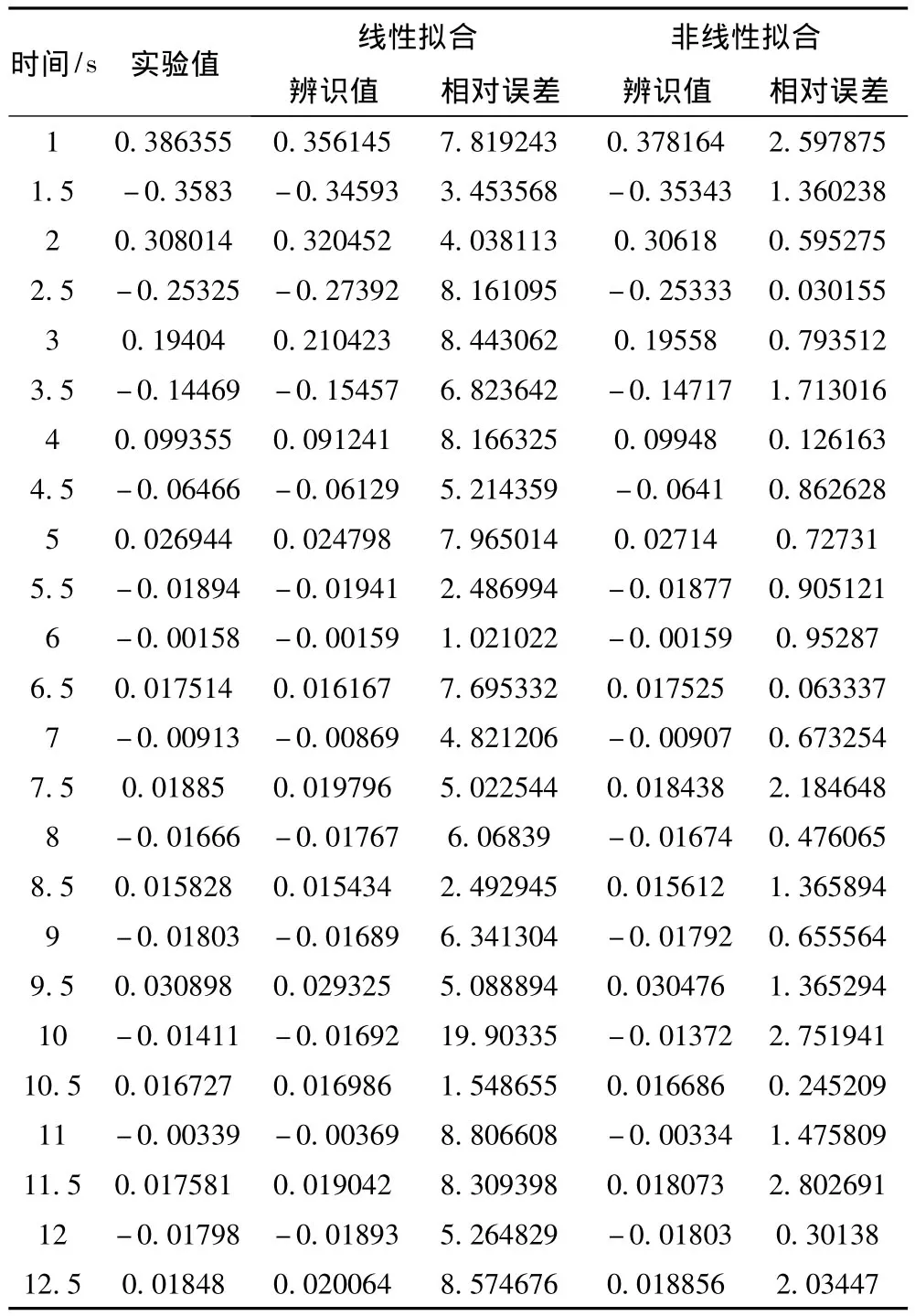
表2 5°自由橫搖衰減時(shí)線性、非線性誤差對(duì)比Tab.2 The error comparison of the linear and nolinear fitting curves of roll angular velocity decay correspond to angular velocity at20°
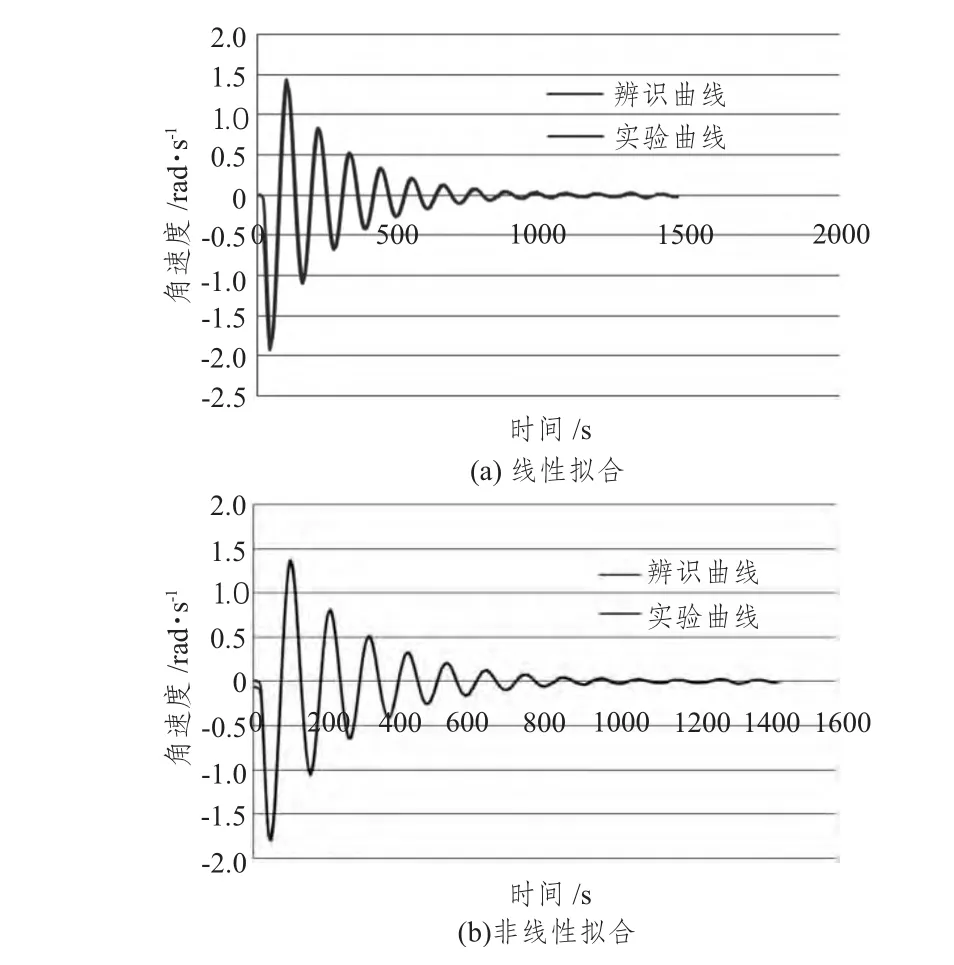
圖5 20°自由橫搖衰減時(shí)對(duì)角速度曲線Fig.5 Roll angular velocity decay correspond to angular velocity at20°
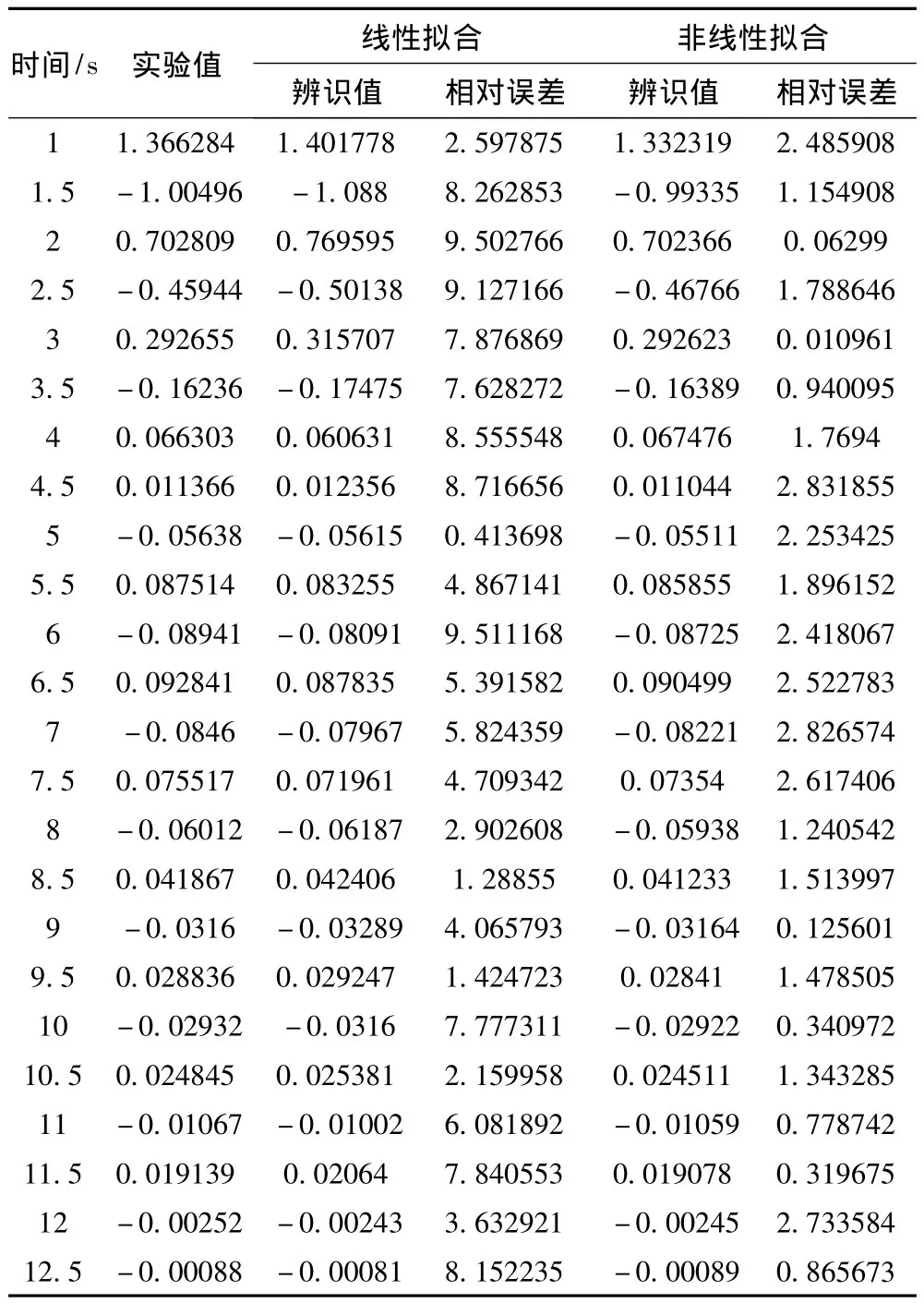
表3 20°自由橫搖衰減時(shí)線性、非線性誤差對(duì)比Tab.3 The error comparison of the linear and nolinear fitting curves of roll angular velocity decay correspond to angular velocity at20°
當(dāng)初始傾角為5°時(shí),即小角度;初始傾角為20°時(shí),即大角度。對(duì)無(wú)人滑行艇模型自由衰減運(yùn)動(dòng)的角速度曲線進(jìn)行研究,比較線性、非線性數(shù)學(xué)模型下的辨識(shí)曲線擬合情況,可明顯看到:非線性數(shù)學(xué)模型下的辨識(shí)曲線擬合較好,與實(shí)驗(yàn)曲線幾乎重合。隨機(jī)抽取某段時(shí)間內(nèi)的實(shí)驗(yàn)值和辨識(shí)值求得其相對(duì)誤差,線性與非線性情況下相比:線性的相對(duì)誤差較大,在10%以?xún)?nèi);而非線性的相對(duì)誤差很小,均在3%以?xún)?nèi)。
對(duì)于線性、非線性數(shù)學(xué)模型所得不同結(jié)果,初步分析認(rèn)為:對(duì)于無(wú)人滑行艇,沿首尾、型深方向曲率變化較常規(guī)型船大,且舭部防濺條突出于船體,因此漩渦阻尼等非線性阻尼較大,所以在建立數(shù)學(xué)模型對(duì)無(wú)人滑行艇的橫搖自由衰減運(yùn)動(dòng)進(jìn)行辨識(shí)時(shí),必須考慮非線性阻尼,建立非線性數(shù)學(xué)模型,此點(diǎn)在發(fā)生大角度橫搖時(shí)尤為必要。
4 結(jié)語(yǔ)
本文通過(guò)無(wú)人滑行艇橫搖自由衰減運(yùn)動(dòng)實(shí)驗(yàn),獲得8組不同初始橫搖角度和吃水的橫搖角速度變化曲線。基于Visual Basic 6.0的遺傳算法系統(tǒng)辨識(shí)程序,進(jìn)行改編,以線性、非線性橫搖衰減運(yùn)動(dòng)數(shù)學(xué)模型為變量,分別對(duì)所得到角速度變化曲線進(jìn)行擬合。選取小角度5°為代表,大角度20°為代表,分別對(duì)比并分析2種數(shù)學(xué)模型下的辨識(shí)擬合曲線和相對(duì)誤差,得出以下結(jié)論:
1)無(wú)人滑行艇靜水橫搖存在非線性阻尼;
2)對(duì)于無(wú)人滑行艇靜水橫搖衰減運(yùn)動(dòng)的辨識(shí)分析,非線性數(shù)學(xué)模型比線性數(shù)學(xué)模型好;
3)基于非線性數(shù)學(xué)模型改變的辨識(shí)程序適用于對(duì)無(wú)人滑行艇靜水橫搖衰減的分析。
[1]許蘊(yùn)蕾.高速無(wú)人滑行艇的縱向運(yùn)動(dòng)分析與仿真研究[J].船舶,2011,22(1):21 -25.
XU Yun-lei.Longitudinalmotion analysis and simulation for high-speed planing crafts[J].SHIP&BOAT,2011,22(1):21-25.
[2]SU Yu-min,ZHAO Jin-xin,CHEN Qing-tong,et al.Numerical simulation of the planing vessel in regular waves[J].Journal of Ship Mechanics,2013(6):583 -591.
[3]張喬斌,尹成彬,吳開(kāi)峰.無(wú)人滑行艇阻力近似計(jì)算方法對(duì)比研究[J].中國(guó)艦船研究,2012,7(3):25 -29.
ZHANG Qiao-bin, YIN Cheng-bin, WU Kai-feng.Comparison between ЦАГИ method and SIT method for resistance prediction of planing crafts[J].Chinese Journal of Ship Research,2012,7(3):25 -29.
[4]HASSAN G,MAHMOUD G.A combined method for the hydrodynamic charaterristics of planning crafts[J].Ocean Engineering,2008(35):310 -322.
[5]REZA Y,ROUZBEH S,MOSTATA S.Hydrodynamic analysis techniques for high-speed planning hulls[J].Applied Ocean Research,2013(42):105 -113.
[6]LIHui-lei,ZHU Feng,YANG Song-lin.Primary Analysis on Rolling Motion of Trimaran[C].Procedings of 2011Asia -Pacific Youth Conference on Communication(2011APYCC),Hangzhou,2011.
[7]王勇,楊松林,范凱.五體船橫搖運(yùn)動(dòng)模式分析方法研究[C].2008年船舶水動(dòng)力學(xué)學(xué)術(shù)會(huì)議暨中國(guó)船舶學(xué)術(shù)界進(jìn)入ITTC 30周年紀(jì)念會(huì),杭州,2008.
WANG Yong,YANG Song - lin,F(xiàn)AN Kai.Research on the analysismethod of rolling motion of pentamaran[C].Ship Hydrodynamics in 2008 Academic Conference of Chinese Academia into ITTC30 Anniversary Commemoration of the Ship,Hangzhou,2008.
[8]崔健,文逸彥,楊松林.一種新型復(fù)合三體無(wú)人沖翼艇的初步研究[C].第十六屆中國(guó)國(guó)際船艇及其技術(shù)設(shè)備展覽會(huì)暨高性能船學(xué)術(shù)報(bào)告會(huì),上海,2011.
CUI Jian,WEN Yi- yan,YANG Song - lin.Preliminary research on a new tipe of compoun unmanned trisomy dram wing[C].The 16th China International Boat and its Technology and Equipment Exhibition and High -performance Ship academic Report,Shanghai,2011.
[9]馬天宇,崔健,楊松林.三體船操縱與橫搖耦合運(yùn)動(dòng)試驗(yàn)與分析[J].艦船科學(xué)技術(shù),2012,34(11):24 -26,36.
MA Tian - yu,CUI Jian,YANG Song - lin.Maneuvering and rolling coupled motion test and analysis of the trimaran model[J].Ship Science and Technology,2012,34(11):24-26,36.
[10]趙連恩,謝永和.高性能船舶原理與設(shè)計(jì)[M].北京:國(guó)防工業(yè)出版社,2009.
ZHAO Lian - en,XIE Yong - he.High performance principle and the design of the ship[M].Beijing:National Defence Industry Press,2009.
Experimental analysis of rollmotion mode of unmanned p laning boat
YANGWang-lin,XU Hai-tong,YANG Song-lin,ZHANG Sheng
(School of Naval Architecture and Ocean Engineering,Jiangsu University of Science and Technology,Zhenjiang 212003,China)
In this paper,the author took an unmanned planting boat as a model and conducted a series of roll decay test on condition that the ship model was in different drafts and tilt angle.Finally,The author got a series of roll angular velocity curve and established respectively mathematicalmodel of linear and nonlinear roll decaymotion mode system identification.Based on the principle of system identification,the author established the objective function.Then the author adapted the genetic algorithm of system identification program based on Visual Basic 6.0,and through the two kinds of systems,the author identified respectively the test data of the rollmotion of the unmanned planting boatand confirmed the feasibility of the adapted program.selecting the identification result of typical small angle and large angle and comparing the identification result of the two mathematical models,the author drew a conclusion that for the unmanned planting boat,the identification result of nonlinearmathematicalmodel is better.
unmanned planting boat;rollmotion mode;ship model test;system identification
U674.942
A
1672-7649(2014)04-0027-04
10.3404/j.issn.1672-7649.2014.04.005
2013-07-22;
2013-08-13
楊旺林(1988-),男,碩士研究生,研究方向?yàn)榇芭c海洋工程結(jié)構(gòu)物設(shè)計(jì)制造。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
- 艦船科學(xué)技術(shù)的其它文章
- 基于非線性穩(wěn)定逆技術(shù)的水下滑翔機(jī)前饋控制器設(shè)計(jì)
- 基于國(guó)軍標(biāo)對(duì)腹板開(kāi)孔強(qiáng)橫梁加強(qiáng)方式的討論
- Siemens PLM Software船舶業(yè)產(chǎn)品生命周期管理解決方案
- 美國(guó)國(guó)防合同管理體制及應(yīng)用案例
- 美國(guó)海軍基于戰(zhàn)術(shù)雷達(dá)的災(zāi)害性天氣探測(cè)及顯示系統(tǒng)
- 基于魯棒Kalman濾波的獵掃雷作戰(zhàn)過(guò)程建模及效果評(píng)估