基于CodeSys 風電機組變槳距控制策略研究
2014-03-02 07:42:54陸國君王贇
風能 2014年4期
陸國君,王贇
(1.德國倍福自動化有限公司,上海 200436;2.中國船舶重工集團公司武漢凌久電氣有限公司,武漢 430074)
0 引言
變速變槳距控制系統是構成風電機組的重要組成部分,近年來風電行業發展迅速,直接帶動了該系統的研究和開發,該系統控制性能的優劣主要由所采用的控制策略是否適合與被控對象所決定。目前,實際工程中常采用常規的PI控制器控制輸出槳距角,該控制器易實現,但有可能出現大超調現象,風電機組作為一種復雜的多變量非線性系統,如僅采用單一的控制很難得到滿意的控制效果[1]。所以采用更適合機組的控制器對減小機組載荷、避免機械共振、最大限度的捕獲風能及為電網提供良好的電能質量等方面起到了至關重要的作用。
1 變槳距控制器設計及建模
1.1 PID控制器
本文介紹的控制算法都基于傳統的不完全微分PID控制算法,其特點是不但能抑制高頻干擾,還克服了普通數字PID控制器的缺點,將數字調節器輸出的微分作用能在每個運算周期里按偏差均勻的輸出變化趨勢,起到了真正微分的作用[2]。不完全微分PID控制算法為:

式(1)中,KP為比例增益;Tn為積分時間常數;Tv為微分時間常數; Td為濾波器系數。控制器框圖如圖1所示。
比例環節P:比例控制是一種簡單的控制方式,控制器的輸入與輸出誤差信號成比例關系。
積分環節I:控制器的輸出與輸入誤差信號成積分關系。在控制系統中,如果進入穩態后存在穩態誤差,則需要引入積分項。積分項主要取決于誤差對時間的積分,隨時間的增大,積分項也增大。這樣,即便誤差很小,積分項也會隨著時間增大而加大,它推動控制器的輸出增大使穩態誤差進一步縮小,直到為零。因此,比例+積分的PI控制器能使系統進入穩態后減少穩態誤差,這也是變槳距控制中常用的控制策略。
微分環節D:控制器的輸出與輸入誤差信號的微分(誤差的變化率)成正比關系。通常,控制系統在克服誤差的調節過程中可能會出現震蕩或失穩。其原因是由于存在較大慣性環節或者滯后環節。控制器中加入微分項,能預測誤差變化的趨勢,比例+微分的PD控制器能改善系統在調節過程中的動態特性[3]。
1.2 傳統變槳距控制算法
傳統風電機組的槳距角控制主要采用的是PI的控制策略,PI控制器具有數學模型簡單,容易控制,響應迅速等優點,在實際應用中使用非常廣泛,其控制器模型如圖2所示,使用轉速信號作為控制信號,信號輸入后,先使用轉速偏差陷波濾波器,濾除特定頻率的轉速干擾信號[4]。隨即使用PI控制器進行控制,由于槳距角的變化對于風速而言是非線性的,如在額定風速附近,較小的風速變化需要槳距角給定一個大變化才能使輸出穩定,因此在額定風速附近需要增大增益,針對此問題,一般整機廠家會設計多套PI參數供機組在不同運行狀態時使用來[5]。
該PI控制器的不足是超調相對較大,調節過快,容易引起機組的振蕩,槳距角的控制曲線較陡峭,易引起變槳距控制系統的執行機構機械疲勞,轉速低時容易引起轉速振蕩,導致機組失去平衡,減少機組運行壽命。
1.3 優化后的變槳距控制算法
經過優化后的算法由兩個PD控制器和一個P控制器構成,分別對發電機轉速、槳距角及加速度進行控制。通過一定條件及運行狀態的選擇,有條件的使用這三個控制器作為輸出,最終以槳距角形式發送給執行機構。
槳距角控制:一般在并網前,機組處于起機或自檢狀態時選用此控制器,因為此時發電機轉速相對較低,還未穩定運行,程序內部反饋的發電機轉速可能存在一定偏差,所以選用當前的槳距角作為控制變量能起到比較好的控制精度。再將輸出的角度值經過低通濾波器,用于濾除高頻角度干擾信號,并通過一定的數學關系轉換輸出槳距角,該控制結構如圖3所示。
發電機轉速控制:當機組穩定運行后,在額定風速附近,大部分時間的控制皆使用此控制器。使用發電機轉速作為控制變量,在信號輸入端使用低通濾波器,濾除瞬時的轉速變化。PD控制器輸出后再使用PT1低通濾波器使輸出轉速信號更為平滑。再通過數據轉換將當前的轉速輸出轉化為槳距角。控制器結構如圖4所示。
發電機轉速加速度控制:控制中實時將轉速的加速度和轉速控制器輸出進行比較,當加速度大于額定值時,即轉速偏差過大,則開始啟用此加速度控制器進行調節。加速度控制器結構如圖5所示。
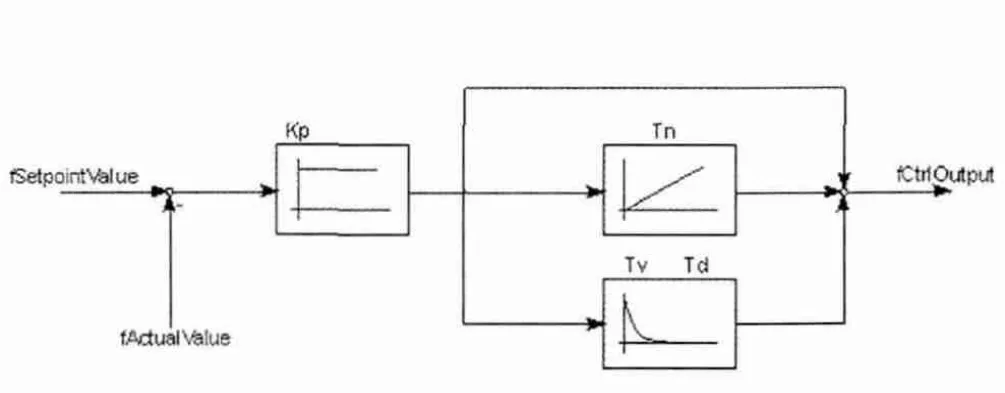
圖1 PID控制器
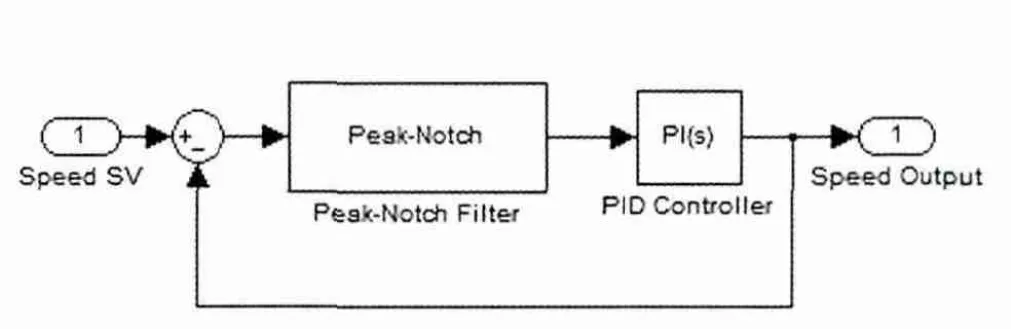
圖2 PI轉速控制器
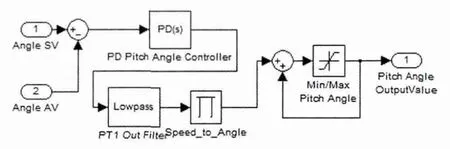
圖3 槳距角控制器
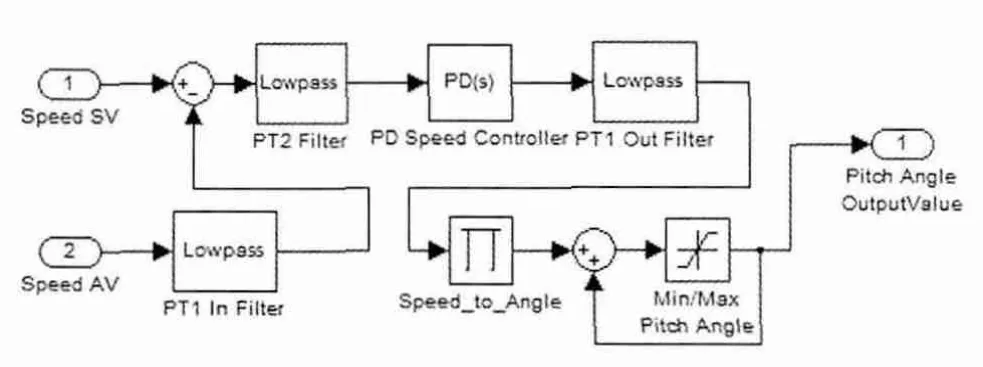
圖4 發電機轉速控制器

圖5 加速度控制器
使用此控制器主要在發電機轉速偏差過大或在啟動階段中需要快速度過機械共振區時起到了重要的作用,實現了對功率最大化及避免長期振動給機組帶來的機械疲勞損傷。
2 變槳距控制模型的數據仿真與分析
本文研究的被控對象為1.5MW三葉片雙饋變速恒頻風電機組。采用基于PC的嵌入式控制器作為硬件,結合實際風電機組控制程序對槳距角的輸出進行比較,使用基于CodeSys V2版本的軟件平臺進行仿真及分析。被控對象的主要技術參數見表1。
使用風速仿真程序對風速進行模擬,在高于額定風速的情況下觀察機組的啟動過程,使用本文介紹的2種不同的控制器對輸出槳距角進行觀察,如圖6所示。
由圖6可以看出,使用優化后的控制算法能夠更平滑的處理槳距角的輸出,以避免振蕩給機組造成不必要的機械損傷。相比之下,傳統控制算法在0度附近時調節過快,易引起機組的振蕩,且控制曲線跟陡峭,易導致變槳執行機構疲勞運行。
3 結語
優化過的PD控制與傳統的PI控制相比。優化后的PD控制器能讓機組更平滑過渡運行,該控制器具有動態響應性好,適應性強,控制精度高等特點,有效減小風電機組在起機時的震蕩,使響應曲線更平滑,且具有較好的魯棒性和穩定性。
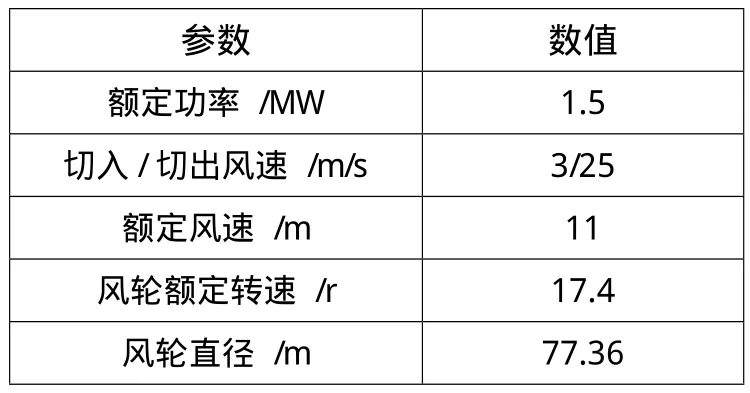
表1 風電機組的主要技術參數
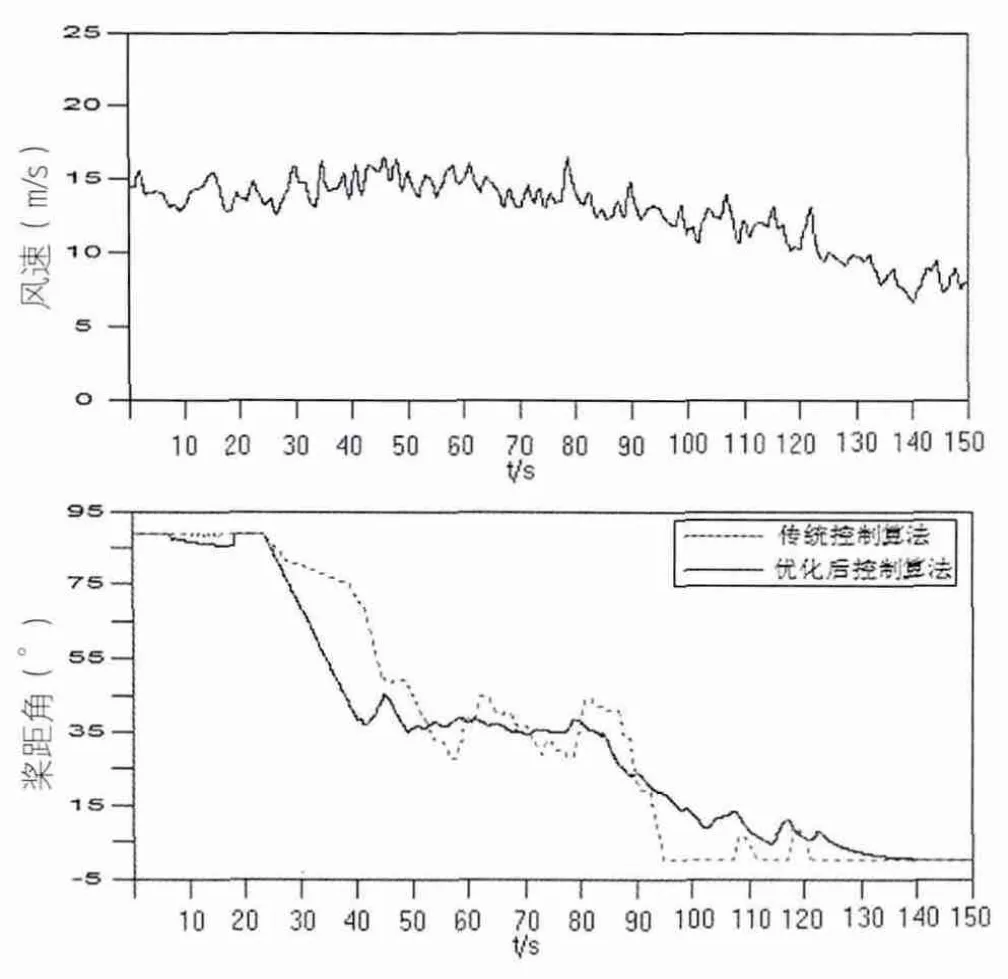
圖6 槳距角仿真響應曲線
[1]王惠斌,徐建軍,代文燦. 基于PID控制器的兆瓦級變槳距風力發電機組控制策略的研究[J]. 電氣開關, 2009,3 :56.
[2]葉杭冶.風力發電機組的控制技術[M].北京:機械工業出版社,2002.
[3]鄭波. 風力發電機變槳距系統研究[D].華北電力大學,2011.
[4]張慶利. 兆瓦級變速恒頻風力發電機組電氣控制系統的研發[D]. 哈爾濱理工大學,2007.
[5]林勇剛,李偉,葉杭冶,邱秀敏,金波,劉湘琪. 變速恒頻風力機組變槳距控制系統[J]. 農業機械學報 2004,35(4) :111-112.
猜你喜歡
故事作文·高年級(2021年12期)2021-12-21 02:32:35
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
西南交通大學學報(2016年4期)2016-06-15 20:29:37
智能建筑電氣技術(2015年5期)2015-12-10 05:52:30
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31
