基于圖像處理的橋梁纜索檢測系統研制
2014-02-28 04:30:13劉朝濤杜子學向中富
重慶交通大學學報(自然科學版) 2014年2期
關鍵詞:檢測
劉朝濤,杜子學,武 維,向中富
(1.重慶交通大學 機電與汽車工程學院,重慶 400074;2.重慶交通大學 土木建筑學院,重慶 400074)
0 引 言
纜索是斜拉橋的主要承重部分,大型斜拉橋纜索存在安裝后難以進行健康檢測和維護的問題。纜索的檢測和維護最關鍵的技術包括兩部分:①研究拖帶檢測儀器在纜索上運動的纜索爬行機器人;②研究纜索的自動檢測技術和儀器。
開發能自動沿纜索爬升并攜帶檢測裝置完成一定作業任務的爬纜裝置,首先可以解決纜索的在役檢測問題,而且還可以給纜索的維護作業提供一種手段。目前,張家梁,等[1]研制了采用電驅動式、氣動蠕動式兩種纜索機器人樣機。趙淑娟,等[2]研制了采用了多電機驅動的爬纜機器人。
纜索的自動檢測技術和儀器,目前在國內外有不少的研究,如振動法、超聲波探傷、磁漏檢測法、電渦流法[3-6]等都可以用于橋梁的纜索的檢測。但這些檢測方法目前更多地處于理論研究和探索階段,在實用性方面還存在一定的局限性,難以在橋梁纜索檢測中得到廣泛實用,尤其是難以做到在役檢測。
纜索常見的病害主要有3種[7]:①拉索護套病害,包括護套的開裂、凹坑、開裂等;②當護套病害嚴重,甚至露絲時,就會發生拉索鋼絲病害,包括鋼絲鍍鋅氧化、鋼絲銹蝕、鋼絲銹斷等;③斜拉索錨具的銹蝕。拉索護套病害、斜拉索錨具的銹蝕能從纜索的外觀上判斷,纜索內部的拉索鋼絲病害通常與護套開裂有關,因此,通過對纜索外觀的觀察,基本上能檢測出大多數的纜索病害[8]。對纜索進行全方位照相,并經圖像處理和識別后再由專業人員人工檢查纜索圖像,相當于橋梁專家對纜索外觀的全方位檢查,對橋梁纜索病害的診斷和維護應該是有效實用的方法。
筆者研制了一種采用單電機驅動的纜索檢測機器人,它能沿纜索自行爬升,并能適應不同直徑的纜索。機器人攜帶了3臺微型相機,可以對纜索進行全方位照相,并通過對纜索圖像進行自動識別,初步判斷纜索的病害,再由人工進一步確認纜索的病害。文章對纜索圖像特征進行了分析,找出病害纜索圖像的特征,研究了纜索病害圖像的分析和判斷方法。
1 纜索檢測系統的研制
纜索檢測系統包括一套纜索檢測機器人(含控制及照相系統)、位于地面的上位計算機。檢測機器人和上位計算機之間通過無線通訊,實現對機器人的控制以及檢測結果的上傳。
1.1 基于圖像的纜索健康檢測方案
筆者將微型數碼相機裝在機器人上,對纜索的各個部位進行拍照,再對所拍攝的纜索圖像進行分析來判斷和識別纜索的病害。
要檢查一根纜索的每個部位的外觀,最少必須有3個鏡頭同時對纜索照相,如圖1。經計算,當3個鏡頭成等邊三角形分布、且距纜索中心至少2倍半徑時,能實現對纜索整個圓柱面的檢查。
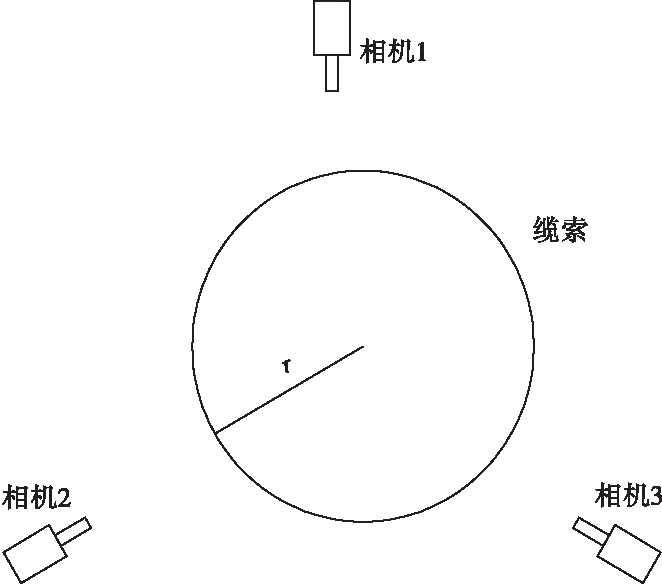
圖1 相機布局Fig.1 Layout of cameras
機器人每行進一段位移,3個照相機同時對纜索進行一次照相,并將圖像存儲。位移的大小取決于照相機拍照時在纜索所在平面的視域大小,必須保證相鄰兩次拍攝到的圖像有部分重疊。
1.2 纜索檢測機器人組成
纜索檢測機器人從整體上包括爬行機構、控制系統、照相系統、電機等幾個部分,其在纜索上的安裝如圖2。爬行機構由單電機驅動,是機器人的運動系統,其任務是帶動整個機構按設定的任務自主地在纜索上上下運動。控制系統是整個系統的中樞,它要完成同地面操作人員的通訊、采集檢測裝置的檢測結果、控制并驅動爬行機構按照要求運動。纜索檢測機器人可以在傾斜度0~90°,直徑為90~200 mm,直徑變化量在20 mm以內的纜索上爬升,爬升速度為1~10 m/s,并可以自主判斷是否到頂,并實施相應的動作。

圖2 檢測機器人組成示意Fig.2 Composition of the cable inspection robot
機器人可以拖帶檢測裝置,如電渦流檢測裝置、磁漏檢測裝置、超聲波檢測裝置等,以檢測橋梁纜索外表及內部是否有損傷。檢測的結果由控制和監視系統負責采集并存儲。機器人還可以拖帶簡單維護設備,對纜索進行維護。
1.3 爬行機構組成和工作原理
爬行機構解決整個機器人在纜索上克服重力作用向上和向下運動。作者設計了如圖3所示的機構,采用彈簧將機構壓緊在纜索上,利用摩擦力和電機的驅動力來克服重力的作用,使整個機器人能在控制系統的控制下運動。

圖3 輪式爬行機構Fig.3 Composition of the crawling machine
爬行機構由兩輛輪式爬行小車和連接裝置組成,小車包括主動小車和從動小車,主動小車和從動小車通過連接裝置連接,連接裝置為系統提供了連接、導向和車輪提供驅動所需的正壓力。連接裝置采用雙螺旋彈簧提供預緊正壓力,并通過輪與橋梁纜索之間的摩擦力轉化為系統的驅動力。主動小車由電機經減速器、傳動機構帶動前后驅輪驅動主動小車運動,并通過連接裝置、導向裝置牽引從動小車運動。主動和從動小車的行走機構均采用平衡懸架行走機構,平衡懸架可實現輪式爬行機構的驅動輪和從動輪與不平的橋梁纜索外表面良好的接觸,為系統的爬行運動提供足夠的驅動附著力,并保障機器人能通過直徑較大變化(20 mm以內)的纜索。而彈簧預緊系統還能夠提供系統爬升所需的法向載荷,滿足橋梁纜索檢測機器人上下行的需要。
1.4 機器人樣機實驗
實驗選擇在重慶李家沱長江大橋上進行。實驗中的機器人如圖4。纜索的參數為:底部直徑Φ120 mm,頂端直徑Φ100 mm,纜索長度140 m。

圖4 重慶李家沱長江大橋上正在實驗的機器人Fig.4 The robot on the Chongqing Lijiatuo Changjiang Bridge
2 纜索圖像分析及病害識別
通過對采集的圖像進行分析和識別,可以減少人工分析圖像的工作量和上下位機之間的數據傳送量。經過對纜索圖像的觀察分析,特別是對正常圖像與病害纜索圖像的對比,發現有病害的纜索圖像病害區域顏色變化較大,顏色深淺不一,形狀復雜多變,因此可以通過圖像紋理來識別圖像是否有病害。
筆者首先用MATLAB對圖像進行仿真分析[9],研究出處理的步驟和方法后,然后再轉化成VC程序,并集成在圖像采集系統的軟件中。圖像分析的步驟為:圖像去噪、圖像增強、圖像分割、紋理特征提取、圖像識別。
2.1 纜索圖像去噪處理
系統所采集的圖像常伴有大量的閃爍亮點噪聲[9-10]。噪聲主要有兩類:一類是高斯噪聲,在圖像上表現為細小、微弱的顆粒性亮點;另一類是脈沖噪聲,在圖像上的表現為較大的、明亮的隨機性亮點。它們主要由光電轉換器件、圖像采集器件CCD和橋梁檢測中的高空、水霧、較低照度環境所造成。針對噪聲特點,首先采用中值濾波算法去掉圖像中脈沖噪聲,然后采用小波去噪去除圖像的高斯噪聲。
中值濾波的基本原理是把數字圖像或數字序列中一點的值用該點的一個領域中各點值的中值代替,從而消除孤立的噪聲點。方法是采用二維滑動模板,將板內像素按照像素值的大小進行排序,生成單調上升(或下降)的二維數據序列。二維中值濾波輸出為:
g(x,y)=mid[f(x-i,y-k)](i,k∈w)
(1)
式中:f(x,y),g(x,y)分別為原始圖像和處理后圖像;w為二維模板,通常為2×2,3×3區域。
小波去噪方法的原理是,將原始圖像在水平、垂直和對角線方向進行小波分解,將圖像分解為1個低頻圖像和3個高頻圖像。這3個高頻圖像分別代表水平方向、垂直方向和對角線方向的邊緣信息。對分解后的低頻圖像進行去噪,而3個高頻圖像保持不變,再把幾個圖像疊加,就可以在濾波噪聲的同時保持邊緣信息。
小波去噪常用的圖像消噪方法是小波閾值消噪方法,對小波分解后的各層系數模大于和小于某閾值的系數分別進行處理,然后利用處理后的小波系數重構出消噪后的圖像。小波閾值消噪方法中閾值的選取是一個非常關鍵的因素。閾值去噪方法主要有3種,經過試驗,給定軟閾值方法最好,這種方法采用wdcbm2函數獲得降噪閾值,然后再用wdencmp函數來實現圖像的降噪。圖像處理結果見圖5。



圖5 纜索圖像濾波Fig.5 Image filtering of the cable
2.2 纜索圖像增強
圖像增強的主要目的是提高圖像的視覺質量或者凸顯某些特征信息。小波圖像增強的步驟為:先將圖像進行小波變換,再在頻域做增強運算,最后經小波逆變換后得到增強后的圖像。小波變換將一幅圖像分解為大小、位置和方向均不相同的分量,在作逆變換之前,可根據需要改變不同位置、不同方向上的某些分量系數的大小,從而使得某些感興趣的分量放大而使某些不需要的分量減小。由于二維小波分解后,圖像的輪廓主要體現在低頻部分,而細節部分則體現在高頻部分,因此,可以通過對低頻分解系數進行增強處理,對高頻分解系數進行衰減處理,即可以達到圖像增強的目的。經過小波圖像增強后圖像更加清晰,紋理更加明顯,圖像的對比度得到拉伸,使圖像的識別更加容易,見圖6。


圖6 圖像增強和分割Fig.6 Image enhancement and image segmentation of the cable
2.3 纜索圖像分割
在對纜索圖像的研究和應用中,往往僅對圖像中的纜索部分感興趣。這些部分常稱為目標或前景,它們一般對應圖像中特定的、具有獨特性質的區域。為了辨識和分析纜索部分,需要將它們分離提取出來,在此基礎上才有可能對纜索進行下一步的識別。圖像分割就是指把圖像分成各具特性的區域并提取出感興趣目標的技術和過程,見圖6。
纜索圖像分割的方法是:分別采用閾值分割檢測圖像的左邊緣和右邊緣。最后把灰度圖像中左邊緣以左、右邊緣以右的像素值賦為255(即為白色),兩邊緣之間的像素值不變。
閾值分割就是確定一個處于圖像灰度取值范圍之中的灰度閾值,然后將圖像中各個像素的灰度值都與這個閾值相比較,并根據比較結果將對應的像素劃分為兩類:像素的灰度值大于閾值的為一類,像素的灰度值小于閾值的為另一類(灰度值等于閾值的像素可歸入這兩類之一)。
2.4 纜索圖像的特征和病害識別
病害纜索的圖像是指有污跡、破損等現象的圖像,它反映了纜索可能受到損害,圖7是一幅實拍的纜索病害圖像。通過對比正常纜索圖像和病害纜索圖像,發現正常纜索圖像顏色分布較均勻,且纜索前后位置的圖像顏色分布變化不大;而病害圖像顏色深淺不一,圖像本身在病害部位附近顏色變化較大,而且與前后位置的圖像在顏色分布上存在較大差異。因此,針對纜索病害的這些特征,可以采用對顏色統計的方法來識別纜索病害。這種識別方法簡單,計算量也較小,尤其適合在嵌入式機器人中應用。

圖7 纜索病害圖像Fig.7 An image of defect cable
圖像特征是指圖像的原始特性或屬性。其中有些是視覺直接感受到的自然特征,如區域的亮度、邊緣的輪廓、紋理或色彩等。有些是需要通過變換或測量才能得到的人為特征,如變換頻譜、直方圖、矩等。紋理特征提取指的是通過一定的圖像處理技術抽取出紋理特征,從而獲得紋理的定量或定性描述的處理過程。紋理特征提取包括兩方面的內容:檢測出紋理基元和獲得有關紋理基元排列方式的信息。
在對纜索圖像病害的識別中,只需要識別出哪張圖片所對應的纜索位置上有病害(反映在纜索上的位置精度為cm量級),以便維護和保養,并不需要特別高的位置精度,也不需要識別病害的形狀。由于識別的目的是檢測出可能是病害的圖片,以便人工進行處理,因此識別應該將所有疑似病害的圖片識別出來,即使將正常圖像誤為病害圖像也沒有關系,還可以進一步由人工處理,但必須保證能完全識別出所有病害的圖像。也就是說,纜索識別的要求是可以有誤判,但不能漏判。
根據纜索圖像病害識別的特點,采用統計紋理特征的方法分析,通過提取圖像直方圖統計紋理特征參數(如均值、方差、偏度、峰度、能量、熵等),就能識別出一張纜索圖片是否病害圖片。這樣可以用簡便而有效的方法實現識別任務,而且計算量較小。
直方圖統計紋理特征參數信息提取算法如式(2):
(2)
灰度直方圖的均值表示圖像的平均灰度,方差表示圖像灰度的分散程度,對于等灰度分布直方圖,即均衡化直方圖,能量最小,熵最大。
由于纜索圖像的病害識別的要求是可以有誤判,但不能漏判。因此對紋理特征的閾值選取必須保守,必須保證病害圖像的識別率為100%。根據上述要求,選擇了大量圖片分別進行這些特征參數的統計分析,找出病害圖像的特征。通過試驗,如果兩相鄰圖像的均值差值在0.200以上、方差在5以上、能量差值在0.02就可能存在病害。
以前述識別條件,對所采集的圖像進行自動識別,一共識別了49個位置共147張圖片,經過人工判定其中17張有一定程度的病害,另外130張圖片為正常的圖片,實驗結果如表1。正常圖像識別率有89.23%,其中有14張圖片被識別為有病害,誤判率10.77%,經過人工分析,發現這些誤判圖片本身存在一定的色差,或橋梁的某些部分的干擾;而有病害的17張圖像則無一遺漏被全部識別出來,病害識別率達到100%,這也正是所需要的。可見,筆者所使用的纜索病害圖像識別方法簡單而有效。
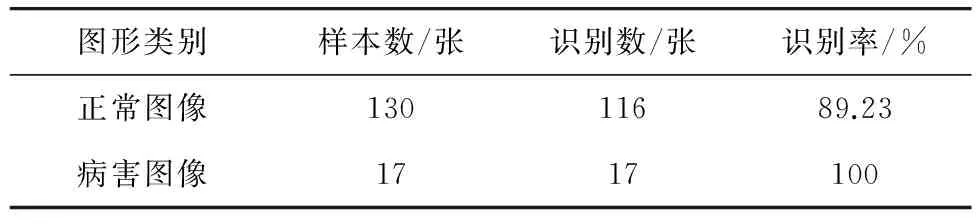
表1 實驗結果
3 結 語
為保證斜拉橋的安全使用,對其纜索進行定期或不定期無損檢測是非常重要的。筆者研制了一種斜拉橋的纜索檢測機器人,它能沿不同直徑的纜索自行爬升,并完成纜索表面和內在質量檢測,能廣泛應用于斜拉橋及類似建筑中的纜索檢測與維護。從樣機實驗的情況來看,該機器人能在不平的纜索上平穩自如地爬升,檢測效率高,效果令人滿意。
筆者還研究了纜索圖像中病害圖像的識別方法和技術,該方法通過對圖像的濾波和增強,然后將纜索部分圖像分割出來。而識別算法則利用分割后的纜索圖像的直方圖,通過對直方圖的紋理特征識別實現對纜索病害的識別。實驗結果表明,雖然有一定的誤判,但這種方法能完全準確地識別出所有病害圖像,說明這種方法簡單而有效。
[1] 張家梁,呂恬生,羅均.大傾斜度纜索機器人的研制[J].高技術通訊,2001,11(1):88-90.
Zhang Jialiang,Lv Tiansheng,Luo Jun.Development of arbitrary gradient cable robot [J].High Technology Letters,2001,11(1):88-90.
[2] 趙淑娟,周憶,王亞斌.斜拉橋纜索檢測機器人結構設計與運動仿真[J].現代制造工程,2011(10):75-78.
Zhao Shujuan,Zhou Yi,Wang Yabin.The design and kinematic simulation of the cable-staged bridge inspection robot [J].Modern Manufacturing Engineering,2011(10):75-78.
[3] 楊叔子,康宜華.鋼絲繩斷絲定量檢測原理與技術[M].北京:國防工業出版社,1995.
Yang Shuzi,Kang Yihua.Principle and Technology of Quantitative Detection for Broken Wire in Steel Rope [M].Beijing:National Defense Industry Press,1995.
[4] 劉春.電磁聲裂紋檢測虛擬儀器系統的研究[J].傳感技術學報,2007,20(2):477-480.
Liu Chun.Study on the system based on EMAT and virtual instrument for detecting cracks [J].Journal of Transduction Technology,2007,20(2):477-480.
[5] 曹印妮,張東來,徐殿國.鋼絲繩定量無損檢測現狀[J].無損檢測, 2005,27(2):91-95.
Cao Yinni,Zhang Donglai,Xu Dianguo.The state-of-art of quantitative nondestructive testing of wire ropes [J].Nondestructive Testing,2005,27(2):91-95,
[6] 林陽子,張宇峰,賴廣勝.橋梁纜索損傷檢測技術分析[J].山西建筑,2010,36(12):291-293.
Lin Yangzi,Zhang Yufeng,Lai Guangshen.The analysis of the inspection technology of the damage of bridge cables [J].Shanxi Architecture,2010,36(12):291-293.
[7] 唐三元,黃德耕,趙俊偉.混凝土斜拉橋常見病害及產生原因[J].西部交通科技,2008(4):60-61.
Tang Sanyuan,Huang Degeng,Zhao Junwei.Common defects and causes of concrete cable-stayed bridges [J].Western China Communications Science & Technology,2008(4):60-61.
[8] 馮俊杰,汪浩.斜拉橋拉索病害檢測及退化程度評估[J].中外建筑,2007(2):89-91.
Feng Junjie,Wang Hao.Defects inspection and degradation evaluation for stayed cables of cable-stayed bridge [J].Chinese and Overseas Architecture,2007(2):89-91.
[9] 余成波,楊菁,王培容,等.數字圖像處理及MATLAB實現[M].重慶:重慶大學出版社,2003.
Yu Chenbo,Yang Jing,Wang Peirong,et al.Digital Image Processing in MATLAB [M].Chongqing:Chongqing University Press,2003.
[10] 夏良正,李久賢.數字圖像處理[M].南京:東南大學出版社,2005.
Xia Liangzheng,Li Jiuxian.Digital Image Processing [M].Nanjing:Southeast University Press,2005.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48