基于馬爾可夫鏈的混合動力汽車行駛工況預測研究*
2014-02-27 06:45:42王松濤
汽車工程 2014年10期
關鍵詞:汽車
張 昕,王松濤,張 欣,田 毅
(1.北京交通大學機械與電子控制工程學院,北京 100044; 2.酒泉衛星發射中心鐵路管理處,酒泉 732750)
前言
混合動力車輛在燃油經濟性和排放性能方面的優勢,來自于混合動力系統中兩種動力源功率或轉矩的合理分配。目前國內外的混合動力能量管理合理分配基本上均依賴于車輛當前時刻的行駛狀態,如車速、需求轉矩和蓄電池荷電狀態(state of charge, SOC)等,沒有考慮汽車未來的運行狀態和駕駛員的預期功率需求,因此無法充分發揮混合動力汽車節能減排的潛力[1-2]。
汽車未來行駛狀態具有較強的隨機性和無后效性(即前一時刻的狀態對下一時刻的行駛狀態沒有直接影響),具有馬爾可夫特征[3],馬爾可夫鏈廣泛應用于自然科學和工程技術領域,對狀態預測有較好的效果[4-6]。為解決混合動力汽車環境適應性的問題,本文中基于馬爾可夫鏈思想,采用具有實際序列性的馬爾可夫鏈混合動力汽車未來行駛狀態預測模型,辨識和預測混合動力汽車未來運行狀態,然后根據預測結果,進行更加合理高效的混合動力汽車能量管理控制,適應多變的交通狀況。
1 HEV行駛工況預測控制原理
馬爾可夫鏈預測模型是一種隨機預測過程,在基于歷史數據的基礎上,確定研究對象發展的轉移概率,根據上一時刻研究對象的狀態預測下一時刻狀態的計算過程,研究對象的第t+1狀態值僅僅與第t次的狀態值有關,由其狀態值和轉移概率乘積決定[7]。馬爾可夫鏈的運動變化分析,主要是研究鏈內有限馬爾可夫過程的狀態和相互關系,進而預測鏈的未來狀況,并據此作出決策。
車輛在連續行駛中,行駛狀態轉移過程由馬爾可夫鏈形式表達,如圖1所示。
圖1中箭頭為車輛行駛方向,在實車試驗中,儀器采集數據的時間間隔為1s(頻率為1Hz時),即采集的時間變量是一個離散連續時間序列,因此圖中每一個虛線所劃分的方格都是車輛在該時刻內離散化后的行駛狀態。因此車輛行駛狀態的變化過程可以表達為連續離散時間t={…,i-3,i-2,i-1,i,i+1,i+2,i+3,…}的一個序列x(t)={…,x(i-3),x(i-2),x(i-1),x(i),x(i+1),x(i+2),x(i+3),…}。
汽車實際運行過程中,行駛工況中各個特征參數都可以進行離散化處理,而且變化過程具有很強的隨機性,并且具有無后效性,系統內部的轉移概率只與當前狀態x(i)有關,而與之前的狀態無關,所以車輛行駛狀態轉移過程具有馬爾可夫性,本文中將著重研究基于馬爾可夫鏈的混合動力汽車行駛工況預測。
2 行駛工況特征參數預測模型的建立
2.1 行駛工況特征參數
行駛工況中特征參數的選取直接影響到模型的預測結果,本文中選用了12個特征參數進行汽車行駛工況預測的研究。這些參數主要分為兩部分:標準參數和波動參數[8-9],見表1。
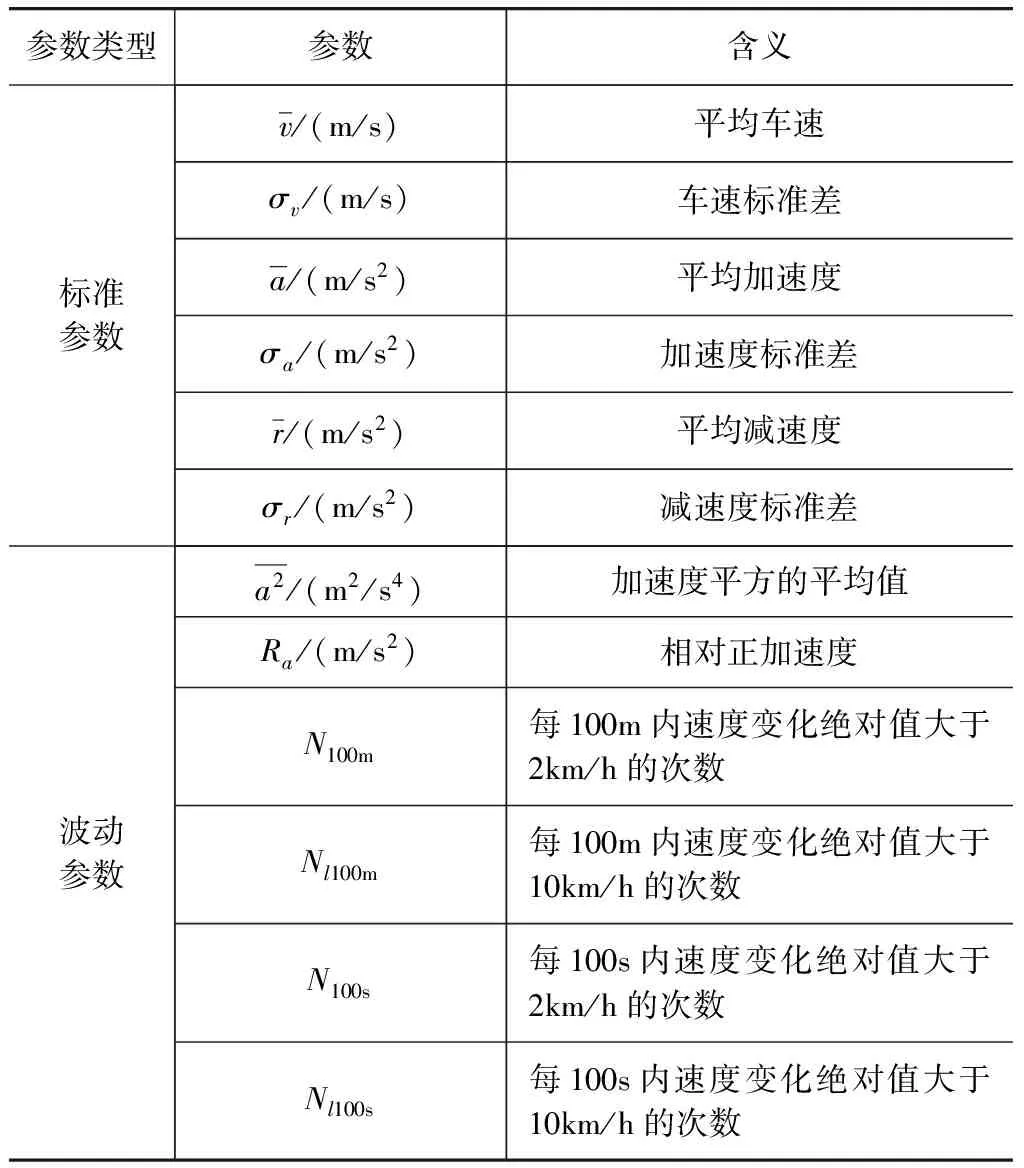
表1 樣本參數

本文中汽車行駛工況特征參數全集為x,用向量{x1,x2,…,x12}進行表示,x1,x2,…,x12分別為表1中12個汽車行駛工況特征參數。針對不同的汽車行駛工況特征參數建立對應的基于馬爾可夫鏈的預測模型,并對其預測準確性進行探討。
2.2 運行車速采集
研究共選取兩種汽車交通流量具有代表性的測試路線:第1種測試路段選擇通過繁華市區且交通流量大的主干道,第2種測試路段選擇車流量大的快速路(環路或高架路)。具體選擇以下兩條路線:通過繁華市區且交通流量大的主干道——長安街(公主墳至八王墳);車流量大的快速路(環路或高架路)——三環路。采集時間為每天上午8:30~11:30,下午13:00~16:00。
采集車速曲線時間跨度很長,為了提高行駛工況預測模型的實時性,將其劃分為短時間的速度-時間曲線片段。考慮到汽車在行駛過程中車速是一個時變量,隨時間的不斷變化而變化,新的車速會不斷生成,而舊的車速則逐漸失去作用。為了提高預測模型的實時性,采用滾動時間窗的方式對速度-時間曲線進行分割,并在此基礎上計算汽車行駛工況的各個特征參數。
滾動時間窗示意圖如圖2所示,設定車速采樣間隔為T,滾動時間窗長度,即分段時間長度為NT,預測視距,即每次滾動時間長度為LT。
汽車的行駛狀態由前N組車速數據來表示,即汽車當前的運行狀態信息是由時間長度為NT的速度小片段內的所有車速組成的。隨著汽車的行駛,時間窗長度為NT的速度小片段向前滾動,不斷有新的車速輸入和輸出。設每次預測視距為LT,為了保持NT時間長度不變,當有新LT時間長度的車速加入時,最早的LT時間長度車速相應的從NT區間移出。
由于汽車行駛工況特征參數具有不同的動態范圍,本文中通過歸一化(見式(1))來消除特征參數動態范圍不同帶來的計算偏差,使得特征向量內部各個分量在預測識別計算時具有相同的貢獻。
(1)
2.3 行駛工況特征參數的狀態劃分
設定汽車不同的行駛工況特征參數xm在每個行駛階段含有Sm1,Sm2,…,Smn個可能狀態:
這里,不同行駛工況特征參數xm在汽車行駛過程中的行駛狀態分別為:πm(1)=πm(0)Pmij,πm(2)=πm(1)Pmij,…,πm(i)=πm(i-1)Pmij,i=1,2,…,n。
(2) 假設汽車行駛工況特征參數在汽車行駛過程中的狀態πm滿足條件:πm=πmPmij,則該參數處于穩定狀態。
2.4 狀態轉移概率矩陣計算
若狀態集合S為n×n有限集合,則一階齊次馬爾可夫鏈的轉移概率矩陣可表示為
(2)
一般的pmij滿足以下條件:
(3)
從理論上講,歷史數據越長,狀態劃分越多,預測準確度越高,但狀態劃分過多,容易導致各狀態樣本點減少,轉移概率規律性不強[10]。本文中將每個行駛工況特征參數平均劃分為4個狀態,即n=4。每個行駛工況特征參數xm看作是一個以{Sm1,Sm2,Sm3,Sm4}為狀態空間的馬爾可夫鏈。


表在主干道中的馬爾可夫鏈的轉移概率
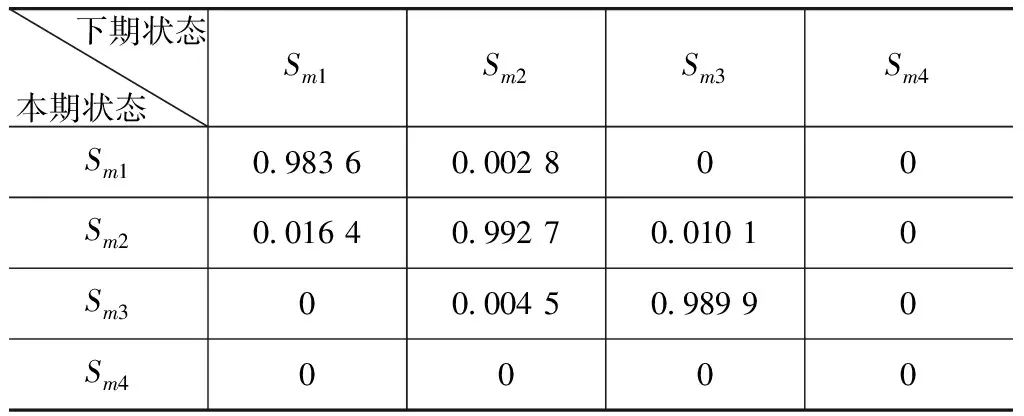
表3 σv在主干道中的馬爾可夫鏈的轉移概率
3 預測模型參數適值優化及準確度分析
在混合動力汽車行駛工況預測過程中,預測視距和滾動時域的大小直接影響預測和實時控制的準確度和效果,本文中對兩者進行適值選取分析。其行駛工況預測準確度根據式(4)進行計算分析。
預測準確度Racc:
(4)
3.1 預測視距選取分析
應用上述基于模糊神經網絡和馬爾可夫鏈的車輛行駛工況特征參數預測模型,針對預測視距LT從1~30s逐次增加取值,圖3為主干道和快速路兩種路況下,預測準確度變化曲線。
由圖可見,快速路工況預測準確度比較為擁堵的主干道行駛預測準確度高,但均隨預測視距的逐漸增加,預測準確度逐漸下降,LT=1s時,快速路預測準確度為83.9%,當預測視距增加到30s時,預測準確度下降至70.3%。導致準確度下降的主要原因在于預測視距長度增加,新近狀態轉移信息無法加入,為保證預測的準確度,LT取1s。
3.2 滾動時間窗適值選取分析
混合動力車輛行駛特征參數從滾動時間窗中提取,如果時域過小,無法涵蓋足夠信息,如果過大,將包含了失去時效的信息。分別對滾動時間窗從160~220s進行了預測準確度分析,其準確度變化如圖4所示。
隨著滾動時域長度的變化,預測準確度沒有明顯的下降或改善,但滾動時間增加,計算速度有一定降低,此外,快速路工況預測準確度在滾動時間窗長度增加后有所降低,相反較為擁堵的主干道行駛預測準確度有所提高。
綜合考慮預測模型的準確性和實時性,選用車速采樣間隔為T=1s,預測視距為LT=1s,滾動時間窗長度為NT=180s。此時在繁華市區特征參數的預測準確度為90.1%,快速路預測準確度為70.5%。
4 預測結果分析
基于上述一階齊次馬爾可夫鏈行駛工況預測模型,對混合動力汽車整車能量管理進行了控制效果分析。
整車能量管理控制模型采用模糊神經網絡控制策略[11](該部分在本文中不做重點介紹)。在運行過程中根據汽車運行狀態預測模型的計算結果,在控制策略庫中選擇相應的最優模糊控制策略進行整車能量管理控制。
為驗證預測效果,本文中另采用某市綜合運行工況進行了預測仿真,運行工況由主干道和快速路兩種運行工況組成,如圖5所示。圖6為運行工況預測識別結果。由圖可見,在主干道運行工況中預測準確率略高,快速路部分路段車速特征介于主干道與快速路之間,預測狀態產生頻繁跳動,后續研究可通過細化運行狀態類型和改進預測算法加以完善。圖7和圖8分別對比了有無工況預測時發動機轉矩和電池SOC的時間歷程。由圖可見,在主干道行駛過程中,基于工況預測控制策略的發動機輸出轉矩低于無工況預測控制策略的發動機轉矩,充分利用電機驅動,耗電量較大,電池SOC增長較慢;在快速路行駛過程中,基于工況預測的整車動力系統更多工作于發動機驅動和發電模式,發動機輸出轉矩增長至480N·m,電池SOC下降較慢,滿足電機助力需求。在全程運行中,電池SOC波動較小,在滿足動力性需求的同時,延長了電池使用壽命。
采用行駛工況預測與無行駛工況預測識別的整車控制方法相比,整車燃油經濟性可提高3%左右,對進一步改善HEV的燃油經濟性和排放性具有一定的促進作用。
5 結論
研究了混合動力汽車行駛工況預測的方法,建立了一階齊次馬爾可夫鏈行駛工況預測模型,對行駛工況特征參數進行了預測,并對預測中預測視距和滾動時間窗的適值選取進行了分析,與傳統基于既定循環工況設計出的整車能量管理控制策略相比,基于工況預測的能量管理策略具有更好的燃油經濟性。為新能源汽車能量管理實時控制提供了一種新方法。
但預測識別準確率在個別段較低,影響其燃油經濟性的提升,主要是由于工況訓練統計數據量有限和一階馬爾可夫鏈方法的限制,此外在實際運行中也會增加隨機干擾等因素,在后續工作中將對算法進行進一步完善。
[1] Gong Q, Tulpule P. The Role of ITS in PHEV Performance Improvement[C]. 2011 American Control Conference (ACC 2011),San Francisco, CA, USA,2011:2119-2124.
[2] 舒紅,高銀平.中度混合動力汽車燃油經濟性預測控制研究[J].公路交通科技,2009,26(1):149-153.
[3] Wang X, McGee R, Gillespie R B. An Energy Management Controller to Optimally Trade off Fuel Economy and Drivability for Hybrid Vehicles[J]. IEEE Transactions on Control Systems Technology: A Publication of the IEEE Control Systems Society, 2012, 20(6): 1490-1505.
[4] Crisostomi E, Schlote A. Traffic Modelling Framework for Electric Vehicles[J]. International Journal of Control,2012,85(7):880-897.
[5] 彭曲,丁治明.基于馬爾可夫鏈的軌跡預測[J].計算機科學,2010,37(8):189-193.
[6] 鄧鑫洋,鄧勇.一種信度馬爾科夫模型及應用[J].自動化學報,2012,4:666-672.
[7] Arrospide J, Salgado L. On-road Visual Vehicle Tracking Using Markov Chain Monte Carlo Particle Filtering with Metropolis Sampling[J]. International Journal of Automotive Technology,2012,13(6):955-961.
[8] 田毅,張欣,張昕,等.汽車運行狀態識別方法研究(一)——特征參數選擇[J].中國機械工程,2013,24(9):1258-1263.
[9] 田毅,張欣,張昕,等.汽車運行狀態識別方法研究(二)——基于模糊神經網絡的識別方法[J].中國機械工程,2013,24(11):1521-1530.
[10] 胡迪鶴.關于隨機環境中的馬爾可夫過程的簡介[J].數學物理學報,2010,30A(5):1210-1241.
[11] 田毅,張欣,張昕.計及行駛工況影響的混合動力汽車控制策略[J].汽車工程,2010,32(8):559-663.
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50