點匹配空間配準中三種誤差之間的關系
2014-02-05 09:21:31王滿寧
組織工程與重建外科雜志 2014年1期
王滿寧
·論著·
點匹配空間配準中三種誤差之間的關系
王滿寧
目的基于標記點的點匹配方法普遍應用于計算機輔助手術的空間配準當中。點匹配中有標記點定位誤差、標記點配準誤差和靶點配準誤差等三種誤差定義方法,本實驗著重研究這三種誤差之間的關系及其對應用的影響。方法我們選擇患者頭顱CT數據進行空間配準的模擬試驗,研究上述三種誤差之間的關系。實驗中我們使用幾種不同的標記點數量,并且模擬了一個高斯分布和一個非高斯分布兩種標記點定位誤差模型。結果相同的標記點數量,標記點配準誤差和靶點配準誤差,都隨著標記點定位誤差的增加而增加。在相同的標記點定位誤差分布模型下,標記點配準誤差隨著標記點數量的增加而增加,但是靶點配準誤差隨著標記點數量的增加而降低。在標記點定位誤差符合相同高斯分布的情況下,標記點配準誤差與靶點配準誤差沒有相關性,但是在標記點定位誤差符合相同非高斯分布的情況下,兩者之間表現出一定的相關性。結論在標記點數量不同的情況下,標記點配準誤差不能用來衡量空間配準的情況。在標記點數量相同的情況下,標記點配準誤差能否反應空間配準情況,則依賴于標記點定位誤差的分布情況。
點匹配空間配準計算機輔助手術
計算機輔助手術系統一般使用患者的圖像來對手術操作進行指導。為了實現這一目的,需要通過空間配準來計算患者空間與圖像空間之間的坐標變換關系。空間配準是指通過匹配兩個空間中的一組共同的特征來計算兩個空間之間的坐標變換的過程,空間配準的精度是決定計算機輔助手術精度的重要因素[1]。目前,計算機輔助手術系統使用的空間配準方法根據所用特征的不同一般可以分為兩類:點匹配和面匹配[2]。其中,點匹配方法因操作簡便、配準精度穩定而在神經外科、耳鼻喉科等計算機輔助手術系統中得到廣泛的應用。在點匹配中存在三個相互關聯的誤差定義[3]:標記點定位誤差(Fiducial Lo-calization Error,FLE),是指定位標記點坐標位置時產生的誤差;標記點配準誤差(Fiducial Registration Error,FRE),是指配準后標記點間的匹配誤差;靶點定位誤差(Target Registration Error,TRE),是指配準后患者空間中任意一點變換到圖像空間中后,與其在圖像空間中的對應點間的距離。其中FLE是TRE和FRE存在的根本原因,但在實際應用中卻是一個無法測量得到的量。TRE一般是空間配準中最關心的指標,但是TRE在實際應用中同樣無法準確測量,而且現有理論僅能對其期望值進行估計,尚不能在單次配準中對某一點的TRE進行準確計算。FRE是點匹配中可以計算得到的一個誤差值,現有系統使用點匹配進行空間配準時,一般通過不斷調整FRE最大的標記點,來逐步降低平均FRE,并期望通過該過程來對配準進行優化。本研究的目的是通過模擬實驗來研究上述三種誤差之間的關系。
1材料和方法
我們選用1例患者的頭顱CT圖像作為實驗數據,并通過以下2個實驗來研究FLE、FRE和TRE間的關系。模式實驗的計算過程如下。
①我們對CT數據進行三維可視化,并在頭部表面選取n個點作為圖像空間中的標記點。n個標記點組成一個集合X={xi∣i=1,2,…,n}。
②使用一個旋轉R和平移T,將X中的點變換到另一位置,得新點集Y={yi∣yi=Rxi+T,i=1,2,…,n},用來模擬患者空間中的標記點,其中yi是xi的對應標記點。實驗中,我們取R先繞X軸旋轉10°,再繞Y軸旋轉20°,再繞Z軸旋轉10°。
③給患者空間中的每個標記點的每個坐標添加一個擾動,形成一個新的點集Y'。
Y'={yi'∣yij'=yij+c△y,i=1,2,…,n;j=1,2,3}
Y'用來模擬患者空間實際選取的標記點集合。其中,j=1,2,3用來索引一個點的坐標的三個分量。△y是一個隨機變量,表示施加給第i個點的第j個坐標分量的擾動值,c是一個常數,稱為擾動系數。這里我們模擬等軸、均勻的FLE,也就是對不同的點以及同一個點的不同坐標分量使用具有相同概率密度函數的△y和相同的擾動系數c。
④通過如下公式計算n個標記點的平均定位誤差:
⑤通過點配準,計算得到一個從X到Y'的變換,用Rreg和Treg表示。同時計算配準后標記點的平均配準誤差FRE。
⑥對于數據場中的任意一點p,其靶點配準誤差為分別使用[R,T]和[Rreg,Treg]對其進行變換得到的兩個點間的距離,即TREp=∣(pR+T)-(pRreg+Treg)∣。對于數據場中處于頭部位置的所有點,平均靶點配準誤差記為TRE。
1.1高斯FLE情況下FRE、FLE和TRE間的相關性第一個實驗中,我們取n分別等于9,8和7。其中,9個標記點盡量分布在頭部較大的范圍內[4-7](圖1)。8個和7個標記點的情況是分別從上述9個標記點中刪除第9和第8個標記點。患者空間中每個標記點的每個坐標分量施加的隨機擾動為c△y。其中,△y~N(0,1),我們針對c=0.8,1.0,1.2,1.4,1.6,1.8,2.0,2.2,2.4分別進行了10 000次實驗,并分析這其中得到的FLE,FRE和TRE的統計特征及相關性。
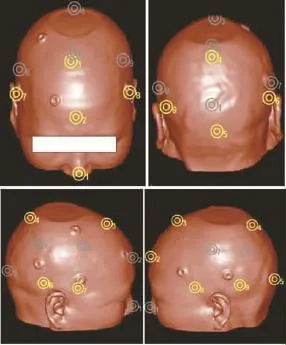
圖1標記點分布圖Fig.1Fiducial points used in the simulation of spatial registration
1.2非高斯FLE情況下FRE、FLE和TRE間的相關性
在第二個實驗中,我們使用和實驗1相同的3種標記點分布。我們仍然用c△y作為患者空間中標記點的擾動,且△y~N(0,1)。但這里我們將c也設定為一個隨機數,c滿足[-k,k]之間的均勻分布。針對k=0.5,1,1.5,2,2.5分別進行了10 000次配準實驗,
2 結果
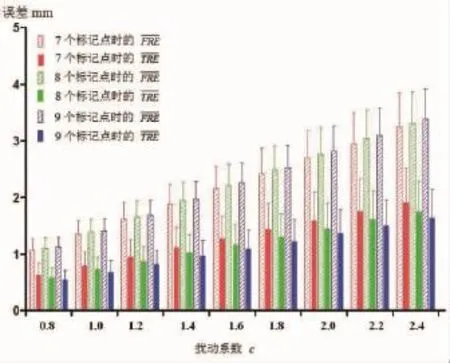
圖2 高斯FLE情況下,不同c的10 000次實驗得到的FRE和TRE的均值和方差分布圖Fig.2Statistical distribution of the FRE and the TRE in 10 000 registrations with different c under Gaussian FLE
相同的標記點數量,標記點配準誤差和靶點配準誤差都隨著標記點定位誤差的增加而增加。在相同的標記點定位誤差分布模型下,標記點配準誤差隨著標記點數量的增加而增加,但是靶點配準誤差隨著標記點數量的增加而降低(圖2、表1)。在標記點定位誤差符合相同高斯分布的情況下,標記點配準誤差與靶點配準誤差沒有相關性,但是在標記點定位誤差符合相同非高斯分布的情況下,兩者之間表現出一定的相關性(圖3、表2)。
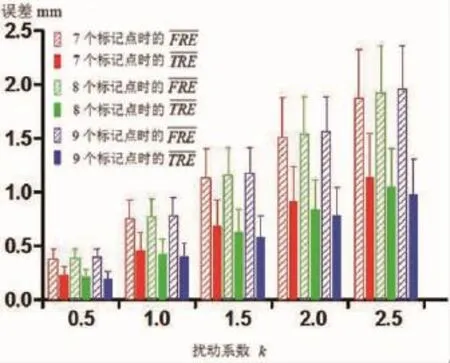
圖3 非高斯FLE情況下,不同c的10 000次實驗中FRE和TRE的均值和方差分布圖Fig.3Statistical distribution of the FRE and TRE in 10 000 registrations with different c under non-Gaussian FLE
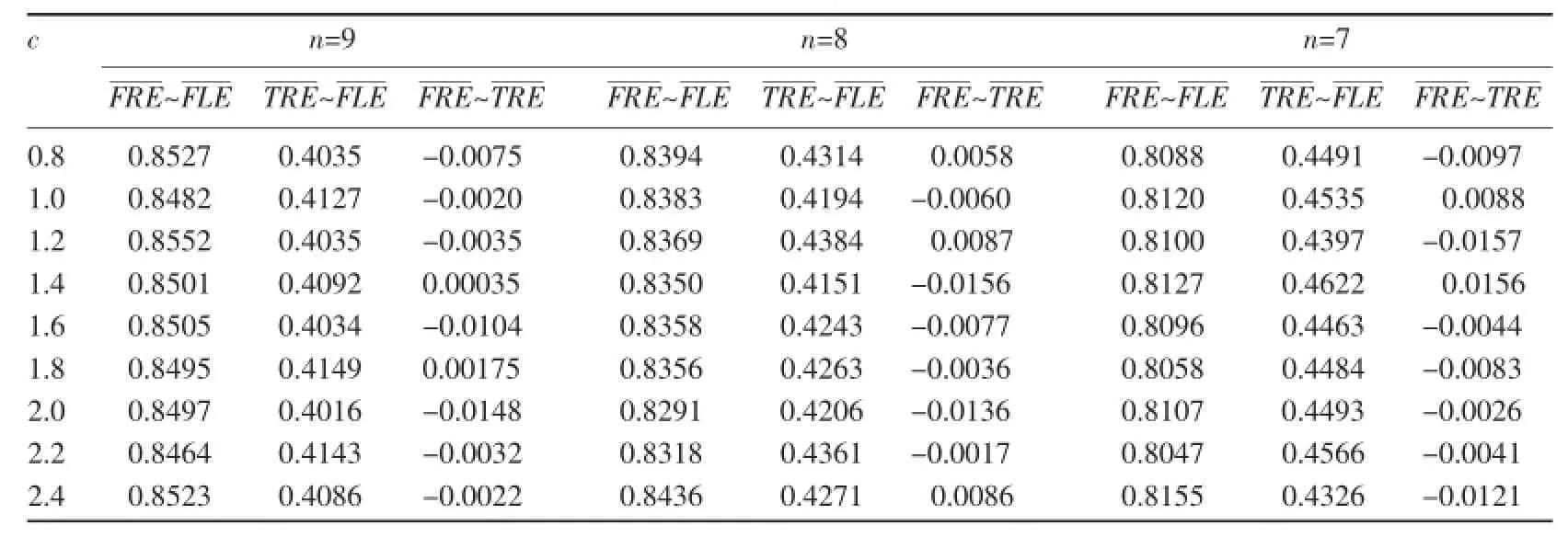
表1 高斯FLE時三種誤差之間的相關性Table1The correlation coefficient of FRE,FLE and TRE under Gaussian FLE
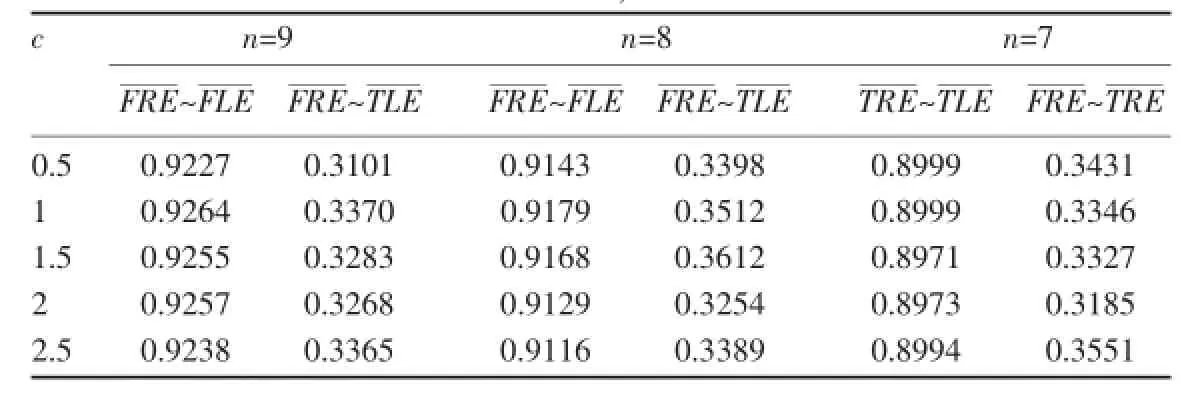
表2 非高斯FLE時三種誤差之間的相關性Table.2The correlation coefficient of FRE,FLE and TRE under non-Gaussian FLE
3 討論
從圖2中可以看出,針對每一個標記點組合,FRE及TRE的均值和方差均隨著擾動系數c的增加而增加,而c的增加表示FLE幅度的增加。同時表1也表明,在每一個固定的對應的10 000次實驗中,FRE和TRE均表現出與FLE之間較強的相關性,表明FLE是決定FRE和TRE的一個很重要的因素。需要注意的是,針對每個固定的c,標記點數量越多TRE越小而FRE越大,也就是空間配準的總精度提高但平均標記點配準誤差加大。這也在一定程度上說明,在標記點不同的情況下不能單純使用FRE來評判配準的精確性。進一步在固定c和標記點個數的情況下,10 000次實驗中得到的FRE和TRE相關性系數極低,這與以前的研究是一致的。
從表2可以看出,當采用非高斯分布的FLE時,FRE與FLE間的相關性進一步加大,而TRE與FLE之間也表現出一定的相關性。本實驗結果表明,在不能確定FLE分布的情況下,僅僅根據以上統計分析,不能判斷點匹配中FRE與TRE之間是否存在相關性,以及實踐中是否可以通過不斷降低FRE來優化空間配準。實驗1和實驗2的結果同時表明,TRE與FLE間有明顯的相關性,因此如果通過調整標記點位置可以降低FLE,則可以期望通過這種方法來優化空間配準。
點匹配是計算機輔助手術中廣泛使用的空間配準方法,而空間配準的精度在很大程度上決定了計算機輔助手術系統所能達到的應用精度。在點匹配方法中存在FLE、FRE和TRE三種不同意義的誤差,其在空間配準中所發揮的作用是不同的。本文通過模擬實驗,驗證了在FLE滿足高斯分布和非高斯分布兩種情況下,平均FRE和平均TRE之間分別表現出很弱和較強的相關性,提示在實際應用中,在通過降低平均FRE來提高空間配準精度時,要考慮FLE的分布情況。同時,在標記點個數不同的情況下,不能單純通過比較平均FRE的大小來判斷配準精度的高低。
[1]Wang M,Song Z.Classification and analysis of the errors in neuronavigation[J].Neurosurgery,2011,68(4):1131-1143.
[2]Cleary K,Peters TM.Image-guided interventions:technology review and clinical applications[J].Annu Rev Biomed Eng,2010, 12:119-142.
[3]Maurer CR,Fitzpatrick JM,Wang MY,et al.Registration of head volume images using implantable fiducial markers[J].IEEE Trans Med Imaging,1997,16(4):447-462.
[4]Wang M,Song Z.Improving target registration accuracy in image-guided neurosurgery by optimizing the distribution of fiducial points[J].Int J Med Robot,2009,5(1):26-31.
[5]Wang M,Song Z.Distribution templates of the fiducial points in image-guided neurosurgery[J].Neurosurgery,2010,66(3 Suppl Operative):143-50
[6]Wang M,Song Z.Guidelines for the placement of the fiducial points in image-guided neurosurgery[J].Int J Med Robot,2010,6 (2):142-149.
[7]West JB,Fitzpatrick JM,Toms SA,et al.Fiducial point placement and the accuracy of point-based,rigid body registration[J]. Neurosurgery,2001,48(4):810-816.
Research on the Relationship of Three Kinds of Errors in Point Matching Spatial Registration
ObjectivePoint matching method is widely used in the spatial registration of computer assisted intervention system.There are three kinds of errors defined in point matching:fiducial localization error(FLE),fiducial registration error (FRE),and target registration error(TRE).The relationship among these errors,and its impact on clinical application were studied in this article.MethodsThe CT image data was utilized to simulate the spatial registration in order to study the relationship among three kinds of errors.Different number of fiducial points and different models of the FLE(Gaussian model and non-Gaussian model)were used to conduct the simulation.ResultsBoth the FRE and the TRE increased along with the increase of the magnitude of the FLE.Under the same FLE model,FRE increased but TRE decreased along with the increase of the number of fiducial points.When Gaussian model of FLE was used,the FRE and the TRE was uncorrelated. When the non-Gaussian model of FLE was used,the correlation coefficient between FRE and TRE was approximately 0.35. ConclusionWhen different number of fiducial points are used,the spatial registration accuracy cannot be compared according to the average TRE.When the same fiducial configuration is used,weather or not the average FRE reflects the accuracy of spatial registration depends on the underlying distribution model of the FLE.
Point matching;Spatial registration;Computer assisted intervention
R319
A
1673-0364(2014)01-0004-04
WANG Manning.
Digital Medical Research Center,School of Basic Medical Sciences,Fudan University,Shanghai 200032,China;Shanghai Key Lab of Medical Image Computing and Computer Assisted Intervention,Shanghai 200032,China.
2014年1月5日;
2014年1月25日)
10.3969/j.issn.1673-0364.2014.01.002
200032上海市復旦大學基礎醫學院數字醫學研究中心,上海市醫學圖像處理與計算機輔助手術重點實驗室。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
西南軍醫(2014年5期)2014-04-25 07:42:48
中國中醫藥現代遠程教育(2014年13期)2014-03-01 04:26:36
