夜間車流量檢測算法中路面反射光的消除方法
2014-01-21 00:52:24歐陽韜朱明旱
電子設計工程 2014年20期
歐陽韜,朱明旱
(湖南文理學院 電氣與信息工程學院,湖南 常德 415000)
智能交通系統(tǒng)是現(xiàn)代交通管理的有效手段,其中負責采集交通流量信息的交通監(jiān)測系統(tǒng)是它的重要部分。目前國內(nèi)大多數(shù)城市的交通監(jiān)測系統(tǒng)是采用地埋式感應線圈的方法來獲取交通信息,由于這種交通流量檢測設備要埋在路面以下,因而要損壞原有路面,使得安裝和維護很不方便,而且存在抗干擾性差、精度欠佳等缺點。近年來隨著計算機和圖像處理技術的不斷發(fā)展,利用機器視覺技術來進行車輛檢測成為一種新的替代方法,有望取代傳統(tǒng)檢測器,成為現(xiàn)代智能交通系統(tǒng)的一個重要組成部分[1]。
在交通流量的視頻檢測中,夜間車輛的檢測一直是一個難題。這主要是因為夜間道路的照明條件較差,車身的可見度很低,無法像在白天一樣,可以通過對相鄰幀的幀間差分[2]、背景差分[3-4]或者光流法[5-6]來檢測運動車輛。即使在照明條件較好的路段,可以采用一種基于梯度濾波和級聯(lián)形態(tài)學濾波的夜間車輛檢測方法,車燈投射光線在路面形成的大面積強反射區(qū)域也會干擾車輛的檢測[7]。一些學者觀察到車前燈是夜間車輛最明顯的特征,通過提取出車前燈進行車流量檢測,但他們大都沒有很好地解決路面反射光的問題,使得車前燈的提取不是十分準確。吳海濤等人[8]采用基于形態(tài)學的方法,把車燈以及車燈在路面清晰規(guī)則的投影一起提取出來,然后進行車燈配對,但他們考慮的情況比較理想,實際的夜間環(huán)境下車燈在路面的反射光區(qū)域是無規(guī)則的,而不是與車燈成鏡像關系。Wei Zhang,Q.M.J.Wu等人[9]利用馬爾科夫隨機場的理論,通過計算最大后驗概率有效地把車燈和反射光區(qū)分為不同的標號場,進而實現(xiàn)車前燈的提取,但是這種方法運算量較大,當圖像像素比較高時難以達到實時性的要求。
為了很好地解決路面反射光對提取車燈的干擾這一問題,吳志偉等人[10]用區(qū)域生長法一并提取出車燈和反射光,然后對分割出的每個連通域計算其圓形度、面積和周長等特征參數(shù),根據(jù)經(jīng)驗設定固定的閾值,如果某個連通域的參數(shù)在閾值范圍內(nèi),則標記為車燈;但是他們沒有充分考慮小前燈與大前燈粘連的復雜情況,此時車燈已不再近似呈圓形,而且車燈互相粘連形成的連通域的面積和周長也會超出閾值的范圍。本文在他們研究的基礎上提出了一種通過計算各個連通域邊界點到質(zhì)點的方差來消除路面反射光的方法。首先將彩色圖像灰度化,然后根據(jù)選定的“種子點”進行區(qū)域生長,這樣有效地提取出了車燈和路面反射光。接著,分別計算各個連通域的質(zhì)心坐標和邊界點坐標,求出每個邊界點到其質(zhì)點的距離,并計算出這些距離值的方差。最后刪除方差大于閾值的連通域,這樣就很好地提取出來了車前燈的圖像信息。實驗結(jié)果證明,該方法能夠有效地消除路面反射光,提高了夜間車輛檢測的魯棒性及其檢測精度。
1 基于區(qū)域生長法的圖像分割
通過分析所采集的夜間交通視頻后發(fā)現(xiàn),車前燈和反射光所在區(qū)域亮度值很高,R、G、B 3個顏色分量值都很接近255,因此無需用到顏色值。為了減少計算量,在圖像分割之前采用下列公式對彩色圖像進行灰度化:

式(1)指灰度圖像的灰度值等于彩色圖像三通道的加權(quán)和,R、G、B為紅、綠、藍三分量,其中權(quán)值為前人實驗和理論推導證明得出的最合理的值。
在圖像分割中比較普遍的方法是門限處理,但這種方法僅對灰度直方圖是雙峰的情況比較好處理。而夜間車輛通行圖像的灰度直方圖一般是多峰的,無法確定合適的閾值,對于這種圖像,用區(qū)域生長方法能夠得到很好的解決[11]。
根據(jù)車前燈和路面反射光區(qū)域總有一些像素值接近255的這一特點,可以用一個較高的閾值分割出部分車燈和反射光區(qū)域,并把它們作為區(qū)域生長的“種子”點。但由于車輛在行駛過程中,車燈亮度值會發(fā)生動態(tài)變化,設定固定閾值可能會導致沒有“種子”點的情況。因此文獻[10]提出了一種基于灰度直方圖的自動求取閾值的方法——求取圖像灰度直方圖極小值點所對應的最大灰度值Thr1作為分割閾值。
考慮到受噪聲的影響,首先需要對灰度直方圖進行平滑處理,令第i個灰度值的個數(shù)等于前后3個灰度值個數(shù)的加權(quán)和:

先定義符號函數(shù):

極小值點對應的灰度值可以用下列公式求取:

為了避免灰度直方圖求取的閾值過小,導致選取的“種子”點過多,設置一個最低值ThrMin,如果基于直方圖的動態(tài)閾值Thr1低于 ThrMin,則令 Thr1等于ThrMin。
由于車燈灰度值從車燈中心開始衰減,一般都有一個下限,因此文獻[10]還設計了兩個準則:1)設置一個較低的閾值Thr2,與“種子”像素相鄰且灰度值高于Thr2的像素為相似像素;2)為了提取出較完整的車燈,相鄰像素與“種子”像素必須用8連通的。
2 路面反射光的消除方法
通過觀察所采集到的圖像,本文總結(jié)出車燈與路面反射光最明顯的特征差異是:路面反射光區(qū)域具有不規(guī)則的形狀且面積一般比車燈區(qū)域大很多。因此,可以對圖像分割后的像素集進行表示和數(shù)學統(tǒng)計分析,根據(jù)統(tǒng)計特性來區(qū)分車燈連通域與路面反射光連通域。
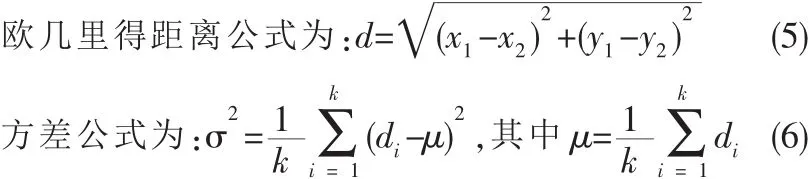
圖1和圖2分別為分割后的某圖像中車燈連通域和反射光連通域邊界點到質(zhì)點的距離統(tǒng)計圖。其中,橫坐標表示邊界點的序號,縱坐標表示連通域邊界點坐標到質(zhì)點坐標的歐幾里得距離。可以明顯看出,圖1中的曲線比較平緩,近似于一根直線;而圖2中的曲線波動比較大。
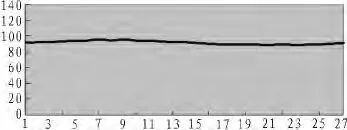
圖1 車燈連通域邊界點到質(zhì)點的距離統(tǒng)計圖Fig.1 The statistical chart of the distance which is from connected domain boundary point of the vehicle headlight to its particle
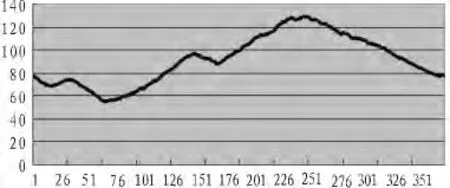
圖7 反射光連通域邊界點到質(zhì)點的距離統(tǒng)計圖Fig.7 The statistical chart of the distance which is from connected domain boundary point of the reflected light to its particle
進一步分別計算圖1和圖2中所有距離值的方差,可以得到圖1的方差 σ21=5.296,圖2的方差 σ22=460.090,可見 σ22遠遠大于σ21。通過對更多其他圖像的分析和計算,同樣具有上述現(xiàn)象和結(jié)果。因此,可以利用方差σ2的大小來描述連通域的形狀規(guī)則程度:σ2越大說明該連通域的形狀越不規(guī)則,反之,σ2越小說明該連通域的形狀越規(guī)則。
同時,σ2的大小隱含了連通域的面積信息。面積大的連通域,其邊界點的數(shù)目也越多,邊界點到質(zhì)點的平均距離也越大,所以比起面積小的連通域,σ2對面積大的連通域的形狀規(guī)則程度更加敏感。綜上所述,σ2越大,該連通域是路面反射光的可能性就越大,所以可以根據(jù)σ2的大小來區(qū)分出反射光區(qū)域,并進一步消除該區(qū)域。
路面反射光消除算法的具體步驟如下:
1)遍歷所有連通域,并給各個連通域編上序號。
2)求出第一個連通域邊界點的坐標和質(zhì)點的坐標,先計算出它們之間的距離大小,再計算出這一組距離值的方差。
3)重復第二步操作,直至計算出最后一個連通域的方差值。
3 實驗結(jié)果與分析
圖3、圖4分別為視頻甲和視頻乙中獲取的一幀圖像;圖5、圖8分別為視頻甲和視頻乙ROI(Region of Interest)區(qū)域的灰度圖像;圖6、圖9分別為圖5和圖8區(qū)域生長后形成的圖像,可以看出車燈和路面反射光都很好地提取出來了;圖7、圖10為使用本文提出的算法處理后的圖像,可見,路面反射光得到了很好的消除,圖像甲和圖像乙中的車前燈都有效地分別提取成功。

圖3 圖像甲Fig.3 Picture A

圖4 圖像乙Fig.4 Picture B

圖5 圖像甲ROI區(qū)域的灰度圖像Fig.5 The grayscale image of ROI of the picture A

圖6 圖像甲區(qū)域生長后的圖像Fig.6 The picture A that is used region growing method

圖7 本文算法處理后的圖像甲Fig.7 The picture A that is used the algorithm of this paper

圖8 圖像乙ROI區(qū)域的灰度圖像Fig.8 The grayscale image of ROI of the picture B

圖9 圖像乙區(qū)域生長后的圖像Fig.9 The picture B that is used region growing method

圖10 本文算法處理后的圖像乙Fig.10 The picture B that is used the algorithm of this paper
特別地,圖10的結(jié)果表明,即使小前燈與大前燈粘在一起,而且反射光區(qū)域面積接近車燈區(qū)域面積,本文所提出的算法依然能夠消除路面反射光,提取出車前燈。而傳統(tǒng)的計算連通域圓形度、面積和周長的方法均不能有效地處理這種復雜的情況。從圖10的結(jié)果還可以看出來,如果車輛為摩托車或者汽車的某一邊車燈損壞,只有一個車前燈,本文提出的算法依然有效,而不像某些傳統(tǒng)的算法那樣會遺漏這種情況下的車輛。
總之,實驗結(jié)果表明,該方法能夠有效地消除路面反射光,而且具有較強的魯棒性,為清晰地提取出車前燈提供了一種新的思路。
4 結(jié)論
對于基于車前燈的夜間車流量檢測系統(tǒng)而言,能否有效地減少路面反射光對車燈提取的干擾是檢測精度能否提高的關鍵。本文分析了現(xiàn)有算法的優(yōu)缺點,對之前提取車前燈的方式作了改進,提出了一種通過計算方差大小來消除路面反射光的方法,該方法降低了算法的復雜度,減小了運算量,實現(xiàn)了快速、準確地提取出車前燈。實驗結(jié)果表明:該算法適應性強,易實現(xiàn),計算量小,滿足系統(tǒng)實時性的需要。
[1]王圣男,郁梅,蔣剛毅.智能交通系統(tǒng)中基于視頻圖像處理的車輛檢測與跟蹤方法綜述[J].計算機應用研究,2005(9):9-14.WANG Sheng-nan,YU Mei,JIANG Gang-yi.Review on vehicle detection and tracking techniques based on video processing in intelligent transportation systems[J].Application Research of Computers,2005(9):9-14.
[2]Lipton A J,Fujiyoshi H,Patil R S.Moving target classification and tracking from real-time video[C]//Applications of Computer Vision,1998.WACV'98.Proceedings.,Fourth IEEE Workshop on.IEEE,1998:8-14.
[3]于成忠,朱駿,袁曉輝.基于背景差法的運動目標檢測[J].東南大學學報:自然科學版,2005,35(A02):159-161.YU Cheng-zhong,ZHU Jun,YUAN Xiao-hui.Video object detection based on background subtraction [J].Journal of Southeast University:Natural Science Edition,2005,35(A02):159-161.
[4]錢晉.基于背景差法的視頻車輛檢測算法研究 [D].上海:上海交通大學,2007
[5]Barron J L,Fleet D J,Beauchemin S S.Performance of optical flow techniques[J].International journal of computer vision,1994,12(1):43-77.
[6]Bruhn A,Weickert J,Feddern C,et al.Variational optical flow computation in real time[J].IEEE Transactions on Image Processing,2005,14(5):608-615.
[7]陳柏生,陳鍛生.采用梯度濾波方法的夜間車輛檢測[J].華僑大學學報:自然科學版,2009,30:42-44.CHEN Bai-sheng,CHEN Duan-sheng.Nighttime vehicle detection based on Grad-Filtering[J].Journal of Huaqiao University:Natural Science,2009,30:42-44.
[8]吳海濤.復雜環(huán)境下的夜間車輛檢測與交通視頻晝夜亮度變化模型研究[D].上海:上海交通大學,2007.
[9]Zhang W,Wu Q M J,Wang G,et al.Tracking and pairing vehicle headlight in night scenes[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(1):140-153.
[10]吳志偉.基于視頻的車流量檢測技術研究[D].廣州:華南理工大學,2012.
[11]岡薩雷斯.數(shù)字圖像處理[M].阮秋琦、阮宇智譯.2版.北京:電子工業(yè)出版社,2007.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44