最小二乘Unscented卡爾曼濾波在偽衛星定位中的應用
2014-01-15 10:00:18高社生吳佳鵬
電子設計工程 2014年19期
關鍵詞:卡爾曼濾波
趙 飛, 高社生 , 吳佳鵬, 楊 一
(1.西北工業大學 自動化學院,陜西 西安 710072;2.航天恒星科技有限公司(503所)北京 100086)
衛星導航系統的精度和可靠性嚴重依靠于可見星的數量和幾何分布狀況,在機場、峽谷、室內和地下等觀測環境較差的區域,因可視星的數量受限而無法滿足用戶導航定位的需要。偽衛星作為一種簡便易行、效果顯著的導航定位手段,可以克服衛星系統的缺陷[1-3]。基于臨近空間飛艇平臺的偽衛星不僅能夠輔助衛星導航系統進行定位,而且可以在導航衛星全部不可用時,由多顆(至少四顆)偽衛星在目標區域上空獨立組網,向用戶提供導航定位服務。
在獨立組網偽衛星系統中,以飛艇為運載平臺的偽衛星由于受到臨近空間各種干擾的影響使得其自身位置存在誤差,從而影響到用戶最終的定位精度。因此,需要對偽衛星飛艇平臺的位置誤差進行修正[5-6]。在偽衛星定位解算中,偽距方程是非線性的,傳統的方法是利用一階泰勒展開式將偽距方程在狀態預測值處進行線性化,成為擴展卡爾曼濾波(EKF)。同時,由于偽衛星到用戶的距離要比導航衛星到用戶的距離近得多,因而偽衛星偽距觀測方程的線性化誤差要比導航衛星偽距觀測方程的線性化誤差大得多[6],從而影響到用戶的定位精度。因此,需要減小偽衛星偽距觀測方程的線性化誤差。
基于以上分析,本文在研究偽衛星星歷誤差傳遞規律和偽距觀測方程線性化誤差的基礎上,提出了一種新的最小二乘Unscented卡爾曼濾波算法。該算法首先利用最小二乘法估計出偽衛星的位置誤差,以減小偽衛星位置誤差對導航解算精度的影響;然后利用無跡卡爾曼濾波算法(Unscented-Kalman filter,UKF)對用戶進行定位解算。仿真結果表明,與傳統的擴展卡爾曼濾波算法相比,提出的算法能夠有效減小偽衛星位置誤差對用戶定位精度的影響,提高獨立組網偽衛星系統的定位精度。
1 最小二乘Unscented卡爾曼濾波算法
假設系統的狀態方程和觀測方程為:

式 (1)中,Xk為n維系統狀態向量,Zk為維系統量測向量,f和h為非線性向量函數,Wk和Vk為不相關的零均值白噪聲序列,方差陣分別為Qk和Rk。
1.1 UKF算法
與EKF不同,UKF不需要對狀態方程或觀測方程進行線性化,它利用非線性模型來近似逼近狀態的分布,避免了線性化誤差。其主要思想是選擇能夠代表系統狀態均值和方差的采樣點,再將采樣點經過非線性變換,變換后采樣點的分布以二階以上精度接近于真實均值和方差。
UKF算法是基于UT(unscented transformation)變換的最小方差估計。 假設隨機變量 X∈Rn~N(X,PXX),Y=f(X),則 Y的均值和方差可通過UT變換求取,步驟如下
1)計算2n+1個樣本點
根據隨機變量X的均值X和方差陣PXX,構造Sigma點集
式(2)中,k=α2(n+λ)-n 為尺度參數,調整它可以提高逼近精度;α確定周圍Sigma點的分布程度,通常設為一個較小的正數(1>α≥1e-4);λ 通常設置為 0或 3-n;用這組采樣點 χi可以近似表示狀態X的高斯分布。
2)通過非線性函數計算變換點

3)計算Y的均值和方差
W(m)i和W(c)i分別為計算Y的均值和方差所用權值
β為狀態分布參數,對于高斯分布β=2是最優的;如果狀態變量是單變量,則β=0是最佳的選擇。
1.2 最小二乘Unscented卡爾曼濾波算法
在偽衛星存在位置誤差的情況下,其位置坐標如下

式(9)中,Si=(xi,yi,zi)表示由星歷計算得到的第顆偽衛星的位置;(x0i,y0i,z0i)表示第顆偽衛星的真實位置;(εxi,εyi,εzi)分別為第偽衛星在 3個坐標方向上的位置誤差,εxi,εyi和 εzi相互獨立且分別服從高斯分布 N(0,σ2xi),N(0,σ2yi)和 N(0,σ2zi)。
最小二乘Unscented卡爾曼濾波的步驟如下:
① 預測:根據系統狀態的均值Xk和誤差協方差Pk,計算狀態預測值的均值和預測誤差的協方差
②偽衛星位置向量估計:利用最小二乘估計得到偽衛星位置的估計值S^i。
③把第二步得到的估計值S^i代入量測方程中,然后計算量測量預測值的均值和誤差協方差以及狀態量和觀測量的互協方差
④更新:計算濾波增益、濾波值和濾波誤差矩陣
上述步驟中,通過最小二乘法對偽衛星的位置誤差進行實時估計,修正偽衛星位置;并且利用無跡卡爾曼濾波算法對用戶進行定位解算,減小星歷誤差和線性化誤差對導解的影響,提高偽衛星的定位精度。
2 偽衛星定位系統模型
根據文獻[7],建立接收機用戶靜態下的離散系統狀態方程:

式(22)中,Xk(x,y,z,δtu,δfu)T,(x,y,z)表示接收機位置,δtu為接收機鐘差,δf為接收機鐘漂Wk為系統激勵噪聲序列,取為零均值高斯白噪聲,Qk為系統噪聲序列的方差陣,假設為非負定陣。
離散系統每一顆可見星的量測方程為:

其中,Vk為量測噪聲,且為零均值高斯白噪聲;Rk為量測噪聲序列的方差陣,假設為正定陣;Wk與Vk不相關。
3 仿真實驗及分析
獨立組網偽衛星系統的幾何布局方案為:一顆偽衛星位于基準或定位中心位置的正上方,高度為30 km,另外3顆偽衛星均勻的分布于服務區的周邊上空,高度角取15°,彼此間的方位角之差為120°,高度為20 km;第五顆偽衛星位于中心偽衛星的正下方,高度為20 km。假定接收機測量得到的各偽距誤差相互獨立且服從高斯分布;各偽衛星的位置誤差相互獨立且服從高斯分布;接收機時鐘偏差Δt=200 ns;σρ=10 m;σs從1 m增加到100 m,仿真結果如圖1和圖2所示。

圖1 GDOP值較小時定位性能比較Fig.1 Positioning performance comparison of small GDOP value
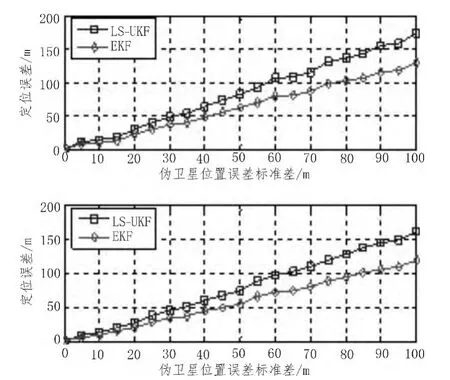
圖2 GDOP值較大時定位性能比較Fig.2 Positioning performance comparison of big GDOP value
圖 1和圖 2分別對應接收機位于 u=(400 m,800 m)和u=(2 km,2.5 km)的情況,實際上也反映了偽衛星的幾何布局()對定位精度的影響。圖1和圖2中的上圖對應于偽衛星數量為4的情況,下圖對應于偽衛星數量為5的情況。通過對圖1和圖2中的上下圖進行分析比較可以看出,隨著偽衛星數量的增多,兩種算法的定位精度都得到了提高。
圖1和圖2中方形表示采用最小二乘Unscented卡爾曼濾波算法計算得到的位置誤差曲線,菱形表示采用擴展卡爾曼濾波算法計算得到的位置誤差曲線。通過對圖1和圖2中誤差曲線的分析和比較可以看出,在偽衛星存在位置誤差的情況下,新算法的定位精度明顯優于擴展卡爾曼濾波的定位精度,而且隨著偽衛星位置誤差的增大,該優勢越明顯。
4 結 論
為了提高獨立組網偽衛星系統的定位精度,在研究偽衛星星歷誤差傳遞規律和偽距觀測方程線性化誤差的基礎上,提出了一種新的偽衛星定位算法。將該算法應用到獨立組網偽衛星系統中進行仿真驗證,并與擴展卡爾曼濾波進行比較。結果表明,提出的最小二乘Unscented卡爾曼濾波算法,濾波性能優于擴展卡爾曼濾波[8],能夠顯著提高偽衛星獨立組網系統的定位精度。
[1]王 宇,孫國良,鄒世開.機載偽衛星差分定位精度分析[J].全球定位系統,2007,32(2):4-7.WANG Yu,SUN Guo-liang,ZOU Shi kai.The analysis on the precision of differential UAV onboard pseudolite[J].GNSS World of China,2007,32(2):4-7.
[2]Kaplan E D.Understanding GPS:principle and application,2nd ed[M].Boston:Artech House,2006.
[3]Zhang M,Zhang J.A fast satellite selection algorithm:Beyond four satellite[J].IEEE Journal of Selection Topics in Signal Processing,2009,3(5):740-747.
[4]Rapinski J.Pseudoulite Location Error.Environmental engineering[C]//The 8th International Conference,2011.
[5]鄧強,黃順吉.星歷誤差在偽距定位中的傳遞 [J].導航,1995(3):42-46.DENG Qiang,HUANG Shun-ji.Ephemeris error propagation law in point positioning with pseudolite[J].Navigation,1995(3):42-46.
[6]楊榮華,花向紅.GPS偽衛星的組合定位技術及其誤差分析[J].地理空間信息,2008,6(4):48-50.YANG Rong-hua,HUA Xiang-hong.Pseudolite-augmented GPS technology and its error analysis[J].Geospatial Information,2008,6(4):48-50.
[7]謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2007.
[8]王京偉,董大偉,華春蓉.擴展卡爾曼濾波的影響因素分析[J].電子科技,2013(8):10-12.WANG Jing-wei,DONG Da-wei,HUA Chun-rong.Analysis of extended kalman filter’s influencing factors[J].Electronic Science and Technology,2013(8):10-12.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
