基于模糊控制的可切割纖維狀原料的傳輸裝置
2013-12-29 00:00:00于涵誠王爾亦
科技資訊 2013年18期
摘 要:本文設計了一種針對可切割纖維狀原料的傳輸裝置,并通過PID閉環控制及模糊控制算法,實現了電機啟動調速及傳輸仰角調整,并在實際生產中進行了應用。
關鍵詞:履帶 梳刀 模糊控制 PID 電機調速
中圖分類號:TP273 文獻標識碼:A 文章編號:1672-3791(2013)06(c)-0100-02
履帶式傳輸裝置是農產品加工、輕工業生產過程中的主要運輸設備。現有的傳輸裝置結構主要是電動機帶動履帶進行傳輸,履帶為水平狀態,傳輸角度無法調節。在傳輸纖維狀物體時,由于纖維束長短粗細不同,無法實現均勻傳輸的目的,往往會出現部分物體糾結抱團的現象;當傳輸的物品中出現鐵性雜物的時候,也沒有辦法進行排除[1]。
針對上述問題,本文所要解決的就是克服現有技術的不足而提供一種傳輸均勻,實現纖維狀原料自動切割成顆粒狀,有利于后續分選的可切割纖維狀原料的傳輸裝置。
1 系統結構
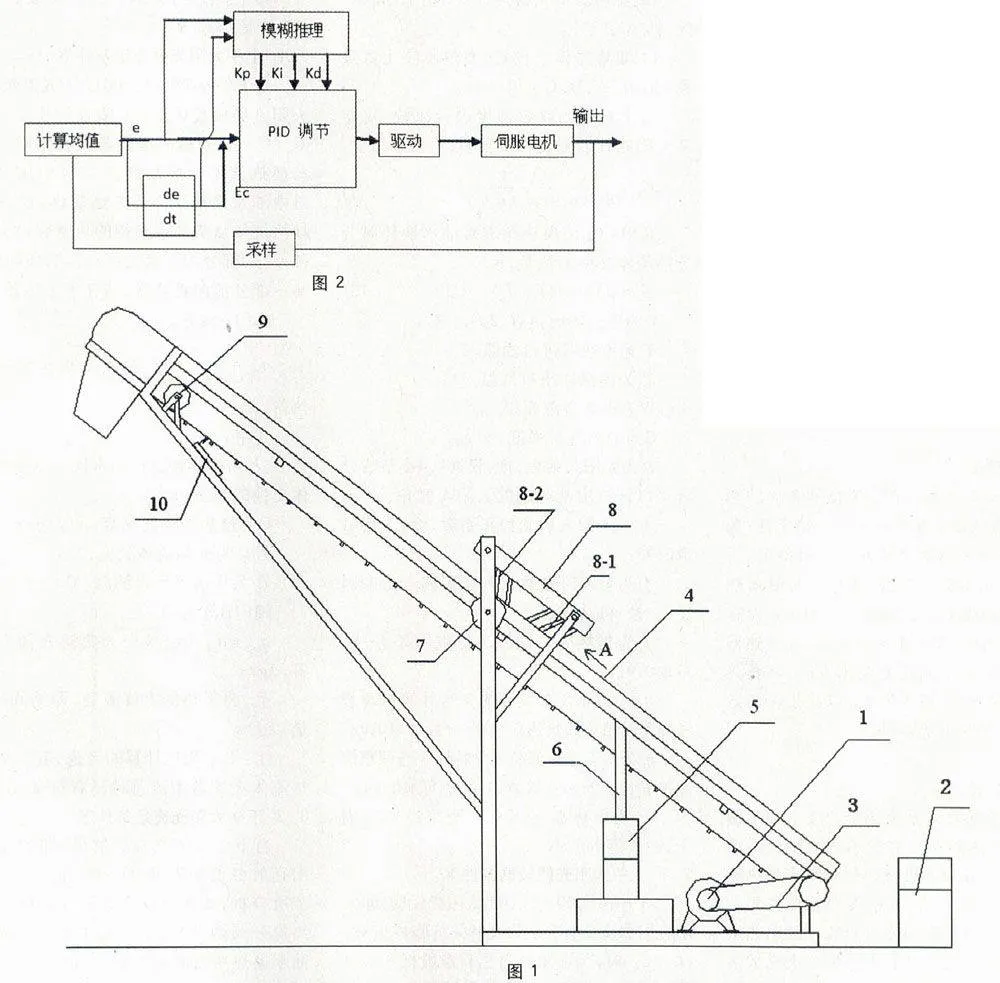
本文裝置包括電機、控制裝置、皮帶輪和履帶。控制裝置帶動電機,電機帶動皮帶輪,履帶包覆在皮帶輪上。其特點在于:履帶一端下方設置有螺旋升降裝置,螺旋升降裝置與控制裝置連接,履帶下方設置有波浪輪,波浪輪上方設置有梳刀,履帶另一端下方設置有電磁滾筒,刷子設置在電磁滾筒的下方,刷子與電磁滾筒接觸。裝置總體結構如下圖1所示。
梳刀包括兩部分:前面為梳子,共設置有三排;后面為三排刀片,刀片與波浪輪正對。
本裝置的工作過程為:控制裝置帶動電機,電機帶動皮帶輪,履帶包覆在皮帶輪上,履帶一端下方設置有螺旋升降裝置,螺旋升降裝置與控制裝置連接,螺旋升降裝置的頂出桿與履帶連接,可以調節履帶的傾斜角度,履帶與水平面的夾角α范圍為0~60°。當履帶傾斜時,履帶上的物品逐層下滑,逐步分開,使得物品在履帶上的分布更均勻。
履帶中段的下方位置設置有波浪輪,波浪輪對應的履帶上方位置設置有梳刀,梳刀橫跨設置在履帶上,物品在履帶上傳輸,到達梳刀的位置,先由梳刀上的前三排梳子8-1進行梳理,后由后三排刀片8-2進行切割,波浪輪外輪廓為正多邊形,本實施例中為5邊形,通過波浪輪外輪廓的凹凸運動使物品與刀片產生間隙擠壓,達到均勻切割的目的。
履帶另一端下方設置有電磁滾筒,刷子設置在電磁滾筒的下方,刷子與電磁滾筒接觸。物品在傳輸到最上方的電磁滾筒處進行分離,電磁滾筒將含有鐵性的物質吸附住滾到下方,由刷子刷離履帶。
本裝置所述的螺旋升降裝置與履帶連接,可以通過控制裝置調節履帶的傾斜角度,履帶與水平面的夾角α范圍為0~60°。
2 控制系統工作原理
傳輸角度調節控制并不屬于簡單的線性控制且控制模型未知,因此需要采用模糊參數自整定PID控制策略來實現。傳輸角度的角度調節范圍量化為0~60的整數值,初始值50。
對于傳輸角度調節而言,根據初值計算出PID調節均值變量e,將e和de/dt作為系統傳輸角度調節程序模塊輸入變量,調用模糊推理策略及PID算法計算出調節后的傳輸角度數據及需要調節的角度偏差值,驅動電機調節螺旋升降裝置高度,同時對調節后的高度采樣,再將其作為系統傳輸角度調節模塊輸入變量,再進行模糊推理策略和PID調節算法計算角度偏差值,之后再驅動電機動作。如此反復推理調節直至達到設定角度值。系統采用的離散PID調節的控制規律[2]為:
式中,u(k)為輸出的控制量;e(k)為控制誤差;ec(k)為誤差的變化率;Kp、Ki和Kd分別為比例、積分和微分的作用系數。模糊參數自整定PID控制的原理如圖4所示,PID調節的各項作用系數由模糊推理規則來確定。根據參數Kp、Ki和Kd對系統輸出特性的影響,規定自整定規則[3]如下。
(1)當|e|偏大時,為避免開始時e增長過快引起的微分過分飽和導致系統超出設定范圍,并提高系統響應速度,以及為了避免積分飽和、防止較大超調出現在系統響應中,因此Kp取較大,Kd取較小。(2)當|e|和|ec|大小適中時,為減少系統響應中的超調,Kp、Ki和Kd都不應往較大取,Ki取較小,Kp和Kd=取中間值,以確保系統的響應速度。(3)當|e|偏小時,為使系統具有較強的魯棒性,應增大比例和積分系數,同時為防止振蕩出現在系統在設定值附近,在|ec|偏小時,Kd值應取大,|ec|值偏大時,Kd值取小。
模糊PID調節的各項作用系數由二階模糊推理來確定。根據參數Kp、Ki和Kd對系統輸出特性的影響,如圖2所示制定各輸入、輸出變量的函數,分別建立Kp、Ki和Kd的模糊控制規則表,并對照模糊控制規則表進行模糊推理和運算后得到Kp、Ki和Kd,從而實現對傳輸角度的模糊PID控制[2]。
3 結論
本裝置與現有技術相比具有產品切斷長度與分布均勻、不含鐵性雜志等優點。除用于傳輸農副產品之外,還可以用于將纖維狀長條物切割為短狀或顆粒狀物品并傳輸,樣機應用于企業實際生產過程中效果較好。
參考文獻
[1]孫大成.色選機控制系統的研究[D].天津:天津工業大學.2010.
[2]代林.基于模糊控制系統的自整定PID參數控制器的設計[J].工業控制與應用,2005(5).
[3]何鴻志.基于PLC的可控起動傳輸裝置CST控制算法[J].煤礦機電,2011(2).