基于二級融合的礦井環境智能監測研究*
2013-12-07 06:53:52王文慶宋炳泉
傳感器與微系統 2013年2期
王文慶,龔 娜,張 濤,宋炳泉
(1.西安郵電大學自動化學院,陜西 西安710061;2.白銀有色集團股份有限公司自控所,甘肅白銀730900)
0 引言
為提高井下安全生產水平,國家要求地下礦山必須建立安全避險“六大系統”[1]。目前,絕大多數的地下礦井安全監測系統都是采用傳感器設定閾值進行越限報警的方法來實現井下工作環境的安全性監測[2]。由于礦井環境惡劣,且傳感器測量存在誤差,采用多傳感器數據融合技術進行數據處理成為必然。文獻[3]采用多傳感器模糊信息融合算法實現礦井安全監測,文獻[4]以Bayes估計理論為基礎得到了多傳感器最優融合數據,文獻[5,6]都首先利用格羅貝斯準則判斷剔除稀疏數據,再分別利用模糊貼近度和分批估計法對余下的有效數據進行融合。上述方法均存在各自不足:首先,需要假設多個傳感器的測量值都服從同一正態分布,而實際情況是傳感器的測量值一般都是局部近似服從正態分布,如果假設整體服從正態分布也會造成很大融合誤差;其次,在定義關系矩陣時常采用閾值法,而閾值的選取受主觀因素的影響很大;再次,利用一些準則剔除稀疏數據時,如果剔除不當則有可能會導致一些有效數據的丟失。在地下礦井環境安全評價方面,文獻[7,8]采用BP神經網絡算法進行安全等級劃分,雖然實現了環境監測系統的智能分析,但BP神經網絡具有收斂速度慢,容易陷入局部極值和網絡結構難以確定等缺點,影響了其學習效率和分類精度。
本文以井下數據采集系統為基礎,首先采用最短距離聚類融合法提高測量數據融合精度,消除了傳感器設定閾值進行越限報警法帶來的誤警率,再采用概率神經網絡設計分類器對數據級融合結果進行安全等級分類,克服了使用BP神經網絡的缺陷,實現了礦井環境安全狀態監測。
1 礦井環境監測系統硬件方案設計
整個系統由客戶端、服務器、數據傳輸通道(有線/無線)及傳感器采集單元組成,如圖1。考慮到礦山的主井(或主平硐)屬于永久設施,服務年限長,故從地面至主井(或主平硐)部署有線通信;從主井(或主平硐)至穿脈和采掘工作面則采用無線通信,以利于靈活布置和設備重用。無線通信部分通過各個基站實現,基站由傳感器采集單元、無線射頻傳輸單元、信號調理及處理單元組成,各個基站之間構成無線以太網,它們將采集的現場數據通過光纖傳送到服務器數據庫中,經二級融合處理后送往客戶端,實現礦井環境參數的越限報警、實時監測、歷史記錄查詢等。

圖1 系統硬件方案設計圖Fig 1 Design diagram of system hardware scheme
2 多傳感器信息融合
2.1 基于最短距離聚類的數據級融合
最短距離聚類融合法[9]不需要假設測量誤差為正態分布,也不需要預先選取閾值來定義關系矩陣,可克服剔除數據不當造成的偏差,適用于多個特性參數的數據融合問題。
最短距離聚類融合將傳感器測量的每組數據視為一類,利用歐氏距離計算出各個類之間的距離形成距離矩陣,再將距離最近的兩類合并成一個新類,然后計算新類與其他類之間的歐氏距離矩陣,重復進行2個最近類的合并,每次減少一類,直到所有組數據合并為一個大類,形成聚類樹形圖,從而確定各個傳感器的融合次序,最后采用文獻[10]的公式進行融合,融合公式為

式中 f(xi1,xj1)表示傳感器 i,j的測量數據xi,xj的第 i個分量融合后的值;c為大于1的實數。融合算法流程圖如圖2所示。
通過上述融合算法,雖然可以獲得各環境影響因素的準確值,但依然不能就此對井下作業區環境的安全等級進行判斷。為此,本文利用概率神經網絡設計分類器做決策級融合,使環境監測系統具有智能分析的功能,以便能夠精確判斷井下環境的安全等級,防患于未然。
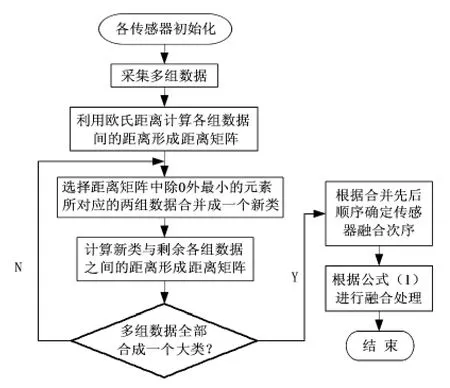
圖2 融合算法流程圖Fig 2 Flow chart of fusion algorithm
2.2 基于概率神經網絡的決策級融合
概率神經網絡(PNN)是一種基于Bayes分類規則與Parzen窗的概率密度估計方法發展而來的并行算法,在樣本數據足夠多時可逼近貝葉斯分類器以獲得最佳分類器的分類性能。PNN的基本結構包括輸入層、模式層、求和層和決策層,如圖3所示。
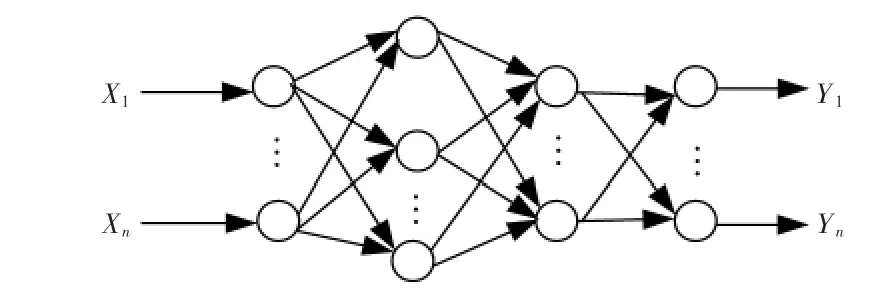
圖3 PNN結構示意圖Fig 3 Structure diagram of PNN

式中 wi為輸入層與模式層之間的連接權值;δ為平滑因子。求和層將有對應樣本中同一類的模式層傳來的輸入(屬于某類的概率)進行累加,即得到輸入樣本屬于該類的最大可能性。決策層接收從求和層輸出的各類概率密度函數,概率密度最大的那個神經元輸出為1,所對應的那一類即為待識別的樣本模式類別,其他神經元的輸出均為0。
3 實驗結果分析
以某地下礦山為例,通過圖1部署的系統獲得井下環境監測數據,包括粉塵、濕度、溫度、風速、CO體積分數、SO2體積分數等。首先通過基于最短距離的多傳感器聚類融合算法進行一次融合處理。這里以CO體積分數數據為例,見表1。
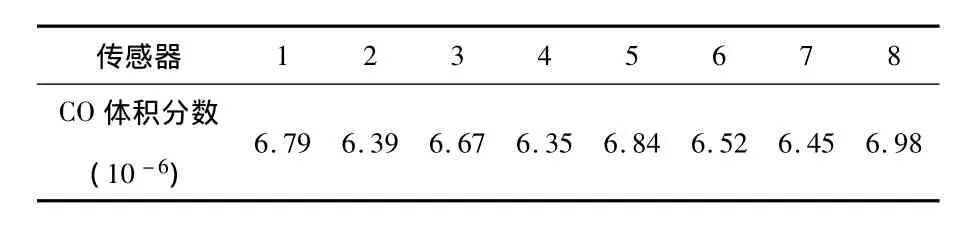
表1 井下某點CO體積分數數據表Tab 1 Data sheet of CO volume fraction of certain point in mine
利用最短距離聚類融合方法首先確定出各個傳感器的融合次序,在Matlab環境下的仿真結果如圖4所示。

圖4 最短距離聚類樹形圖Fig 4 Tree shape diagram of minimum-distance clustering
由圖4可以清楚地看出各個傳感器的融合次序與合并水平,然后利用式(1)計算出最終的融合結果(取 C=1.0001)。為了說明聚類融合方法的優越性,再分別用傳統的算術平均法和文獻[6]提出的羅貝斯準則剔除稀疏數據和分批估計相結合的方法計算出融合結果,同時也給出當傳感器1的測量值隨機擾動+0.01(即傳感器1的測量值變為6.80,-0.01(即傳感器1的測量值變為6.78)后的3種方法融合結果的比較,如表2所示。

表2 三種方法融合結果的比較Tab 2 Comparison of three methods fusion result
從表2中可以看出:基于最小距離聚類融合算法得到的融合結果比其他方法更接近被測量真值,確實提高了測量精度。
采用同樣的方法可以得到礦井作業區中溫度、風速、SO2、粉塵等其他環境參數的數據融合值列于表3。在此基礎上,應用PNN實現環境安全等級分類,并將安全等級分為非常安全、安全、較不安全和危險四類。
表3中的非常安全對應于1類,安全對應于2類,較不安全對應于3類,危險對應于4類。在一段時間內得到20組經一次融合處理后的數據,將它們作為神經網絡的輸入,其中,前12組融合處理結果用于神經網絡分類器訓練樣本,后8組用于測試分類的正確性。利用Matlab工具箱對PNN進行訓練并測試,PNN的平滑因子經過多次嘗試取δ=1.5,PNN的分類效果如圖5、圖6所示。
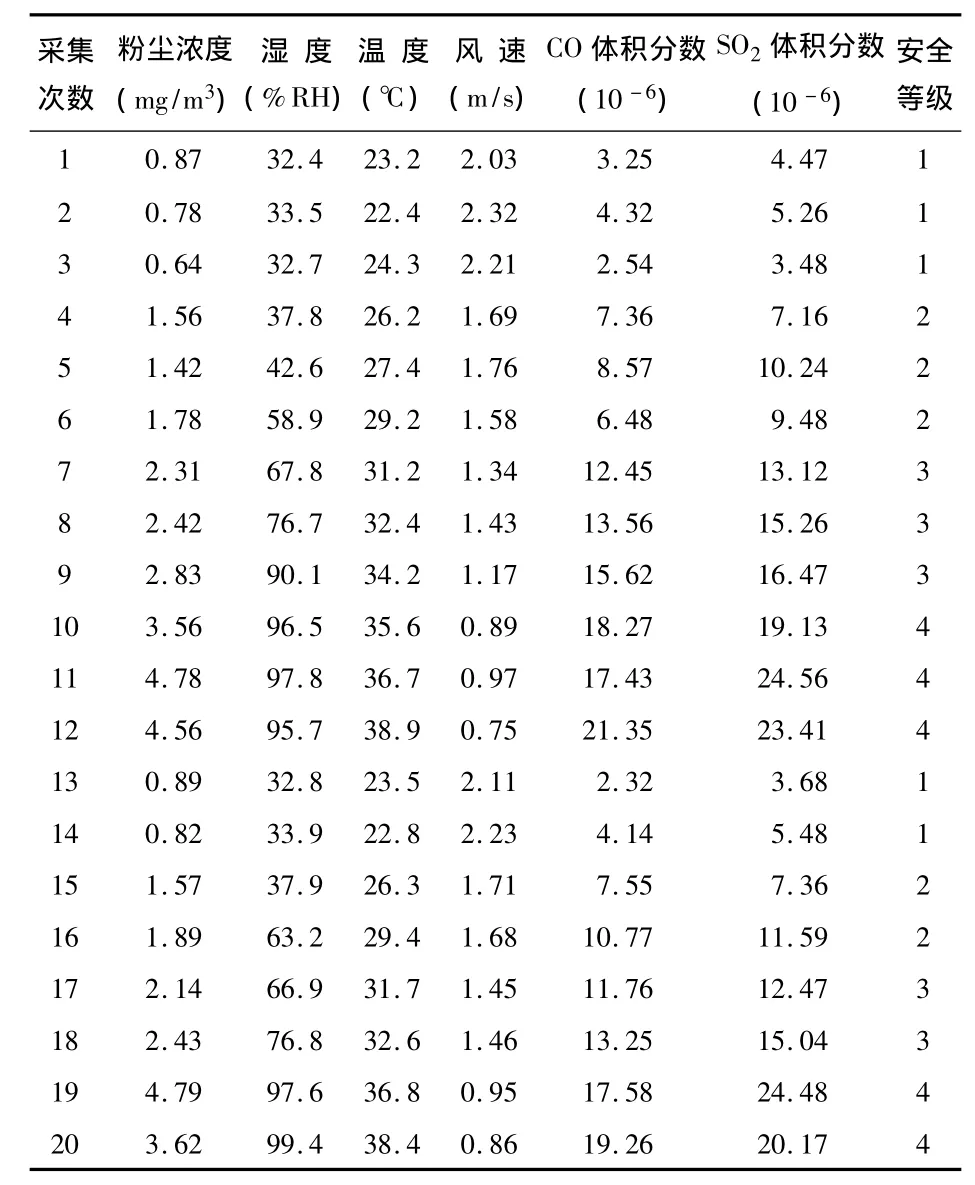
表3 一級數據融合結果Tab 3 One-step data fusion result

圖5 訓練數據網絡的分類效果圖Fig 5 Classification effect diagram of training data network

圖6 預測數據網絡的分類效果圖Fig 6 Classification effect diagram of predicted data network
從圖5可以看出:在網絡訓練完成后,對已經訓練好的概率神經網絡,將訓練樣本輸入進行環境安全等級分類識別,12個訓練樣本被完全正確分類。由圖6可見,用測試數據作為輸入特征向量進行分類正確性測試,8個測試樣本中只有1個分類錯誤。
為了說明采用概率神經網絡的優越性,將本方法與文獻[7]采用的BP神經網絡方法進行比較,結果列于表4。顯然,概率神經網絡在學習訓練速度與準確率方面都要優于BP神經網絡模型。

表4 兩種網絡模型測試效果比較Tab 4 Test effect comparison of two kinds of network model
4 結論
本文以實現地下礦山環境安全智能監測為目標,提出了基于最短距離聚類數據融合和基于概率神經網絡的井下環境安全智能監測方法,避免了以往文獻研究類似問題時,需要假設傳感器的測量值服從正態分布、并根據主觀設定閾值來定義關系矩陣等的缺陷;同時,采用概率神經網絡實現智能分類,提高了分類速度和準確率。實踐結果表明:基于二級融合的地下礦山環境智能監測系統實現了對環境的有效監測,提高了礦井安全生產水平。該系統已在白銀集團某地下礦山成功實踐。
[1]閆昕嶺.基建煤礦建設安全避險“六大系統”適用條件分析[J].煤礦安全,2012,43(4):187-189.
[2]付 華,高 婷,劉 洋.多傳感器模糊信息融合在煤礦安全中的應用[J].傳感器與微系統,2008,27(5):114-116.
[3]王傳英,付 華.模糊數據融合算法在煤礦安全系統中的應用[J].傳感器技術,2005,24(6):72-73.
[4]杜曉坤,陳 峰.兩級信息融合在煤礦監測系統中的應用[J].傳感器與微系統,2010,29(7):124-126.
[5]郭向勇,傅國強,呂利昌,等.模糊推理和聚類分析的信息融合應用研究[J].微計算機信息,2010,26(5):128-129.
[6]江 萍,胡社教,潘宗嶺.軌枕蒸養測控系統中的溫度融合[J].傳感器技術,2003,22(9):37-38,41.
[7]訾興建.多傳感器信息融合技術在瓦斯監測中的應用[J].煤礦安全,2010(9):36-38.
[8]梁 濤,侯友夫.信息融合技術在礦井環境監測系統中的應用[J].礦山機械,2009,37(3):37-40.
[9]萬樹平.多傳感器數據的聚類融合方法[J].系統工程理論與實踐,2008(5):132-135.
[10]Odeberg H.Fusion sensor information using fuzzy measures[J].Robotica,1989,31:217-242.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
