指靜脈與折痕雙模態圖像采集系統設計*
2013-12-07 06:55:20管鳳旭姜智超吳秋雨王科俊孟祥宇
傳感器與微系統 2013年2期
關鍵詞:模態
管鳳旭,姜智超,吳秋雨,王科俊,孟祥宇
(哈爾濱工程大學自動化學院,黑龍江哈爾濱150001)
0 引言
單一生物特征識別技術在現實應用中存在各種不足之處,使雙模態甚至更多模態生物特征識別技術應運而生,成為生物特征識別領域中一種新的研究方向,為生物特征識別技術提出更高層次要求[1,2]。
手指靜脈具有活體識別、內部特征、非接觸和安全性高等優點,因此,手指靜脈識別技術是一種高防偽的第二代生物認證技術[3,4],但存在可提取特征信息量不足的缺點。手指指節折痕位于手指皮膚表面,相對于指紋具有不易磨損與改變的優點[5~7]。如果有效利用手指靜脈和指節折痕這2種生物模態各自的優點,組成一個雙模態生物識別系統,將彌補單一手指靜脈生物特征數量不足的缺點,使識別系統安全性與可靠性得到提高。因此,本文設計一種手指靜脈與指節折痕的雙模態圖像采集系統,即可以針對同一只手指,利用CMOS攝像頭、可見光與不可見近紅外光成像技術[8]、紅外濾光片移動裝置、USB 2.0接口、YUV轉換RGB等技術,先后獲取同一位置的皮膚內部手指靜脈圖像和皮膚表面的指節折痕圖像。
1 雙模態圖像采集系統結構
手指靜脈和指節折痕圖像成像原理為:當不可見近紅外光照射手指時,靜脈中血紅蛋白對近紅外光有明顯吸收效果,因而形成靜脈紋路圖像;手指指節折痕位于手指皮膚表面,通過可見光照射就可形成指節折痕圖像。為提高這2種圖像質量,2種不同類型光不能同時亮,且需要紅外濾光片濾光。紅外濾光片可使高于某一波長的近紅外光通過,而低于該波長的可見光截止。當紅外濾光片擋在攝像頭上且不可見近紅外光亮時,攝像頭可采集手指皮膚內部的手指靜脈圖像;當紅外濾光片移開攝像頭可視范圍且可見光亮時,攝像頭可以采集手指指節折痕圖像。
可采用手工方式或自動方式左右移動紅外濾光片。自動方式則需要一個微型步進電機帶動凸輪聯動機構拖動紅外濾光片左右往復移動。同時,在紅外濾光片移動的滑道兩端各安裝一個行程開關,分別為可見光源與近紅外光源的控制開關。根據上述工作方式,本文設計的雙模態采集系統組成結構如圖1所示。
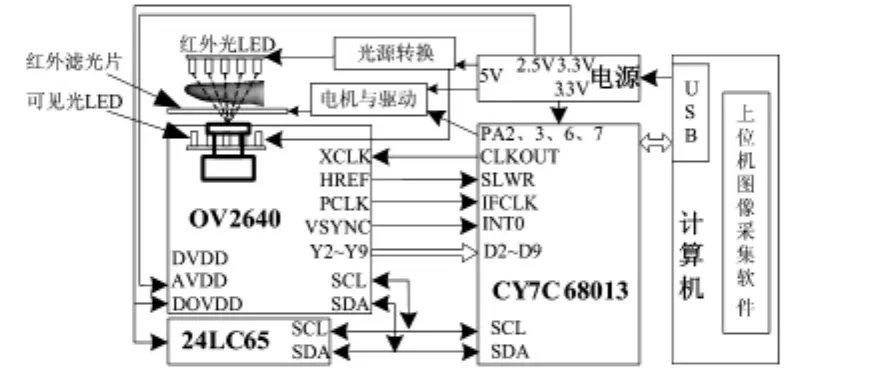
圖1 雙模態圖像采集系統結構圖Fig 1 Structure diagram of dual-modal image acquisition system
2 圖像采集系統硬件設計
2.1 圖像傳感器
為減小采集裝置尺寸、降低成本,選擇功耗低且集成度高的CMOS攝像頭模組,其核心圖像傳感器為OmniVision公司的OV2640芯片,該芯片最高可采集200萬像素圖像,具有10位A/D轉換電路。OV2640模組大小和一角錢硬幣相仿。
考慮到OV2640芯片RGB感光范圍為500~980 nm;尤其是波長為830 nm時,對近紅外光成像效果達到最優。這樣,OV2640芯片既可以采集到以可見光成像的指節折痕圖像,又可以采集到以不可見近紅外光成像的手指靜脈圖像。
為保證上位機圖像采集軟件能夠獲取24幀/s以上動態且清晰的視頻,設置圖像尺寸為SVGA(800×600)模式,圖像輸出格式為YUV422。設計電路如圖2所示。其中,攝像頭模組的數字視頻端口電壓DOVDD為3.3 V,模擬電壓AVDD為2.5 V,這2種電壓由電源模塊提供,另外,數字電壓DVDD為1.3 V,既可以由外部電源模塊提供,也可以通過寄存器設置由內部產生,本設計采用后種方式。
2.2 USB 2.0控制器

圖2 OV2640攝像頭模組接口電路Fig 2 Interface circuit of OV2640 camera module
USB 2.0芯片采用CY7C68013[9]。為實現USB芯片實時接收圖像傳感器視頻數據,設置USB芯片為Slave FIFO從機模式,將圖像傳感器的幀同步信號VSYNC作為一幀圖像接收的中斷信號(圖3),將行同步信號HREF作為USB芯片的寫信號SLWR,并將像素時鐘PCLK作為USB芯片傳輸時序時鐘信號,以保證行同步信號HREF有效時才能接收圖像的像素數據。同時,設置數據端口為8位數據總線模式,可接收圖像傳感器Y2~Y9數據線上的數據。為實現將視頻數據從USB芯片快速傳輸至計算機中,設置EP2端口為BULK傳輸模式的IN端點,4重緩沖,每包字節數為1024。

圖3 USB控制器電路Fig 3 Circuit of USB controller
2.3 I2C總線
當計算機操作系統識別USB設備時,USB控制器通過I2C總線,可將存儲在E2PROM(圖4)中的固件程序下載到自身的RAM中執行,實現重枚舉與控制硬件。
為保證OV2640攝像頭模組按照設定方式工作,需要通過I2C總線將固件程序中大量控制參數有效寫入到OV2640芯片寄存器中,甚至可以通過I2C總線從OV2640芯片寄存器中讀取飽和度、AGC增益、白平衡等參數。但當攝像頭模組接口距離USB芯片較遠、且I2C信號線過細時,會導致I2C通信不可靠,采用CBTD3306芯片(圖5)可提高I2C總線驅動能力。圖5中,SIO—C和SIO—D為USB控制器引出的信號線(圖3);SIO—C—1和SIO—D—1是增強后的信號線,然后連接到攝像頭模組的I2C接口(圖2)。
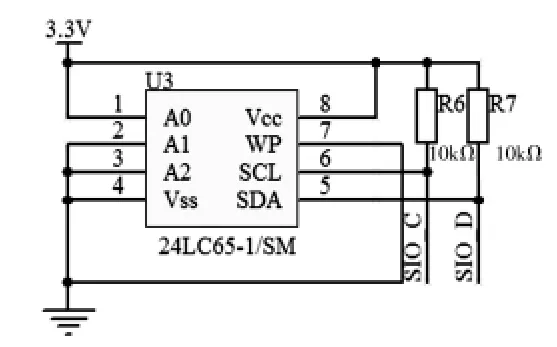
圖4 E2 PROM電路Fig 4 Circuit of E2 PROM

圖5 I2 C總線驅動能力增強電路Fig 5 Drive capability enhancement circuit of I2 C bus
2.4 紅外濾光片移動電路
采用L298P芯片設計電機驅動電路(圖6),驅動一個5 V的2相4線微型步進電機。由于USB控制器工作電壓為 3.3V,因此,其輸出控制信號 PA2,3,6,7(圖7)的高電平為3.3 V,為確保能可靠控制電機驅動電路,特采用電平轉換芯片74LVX4245將3.3V的PA2等控制信號轉換為高電平為5 V的控制信號Input1~Input4。

圖6 微型步進電機驅動電路Fig 6 Drive circuit of micro-stepping motor
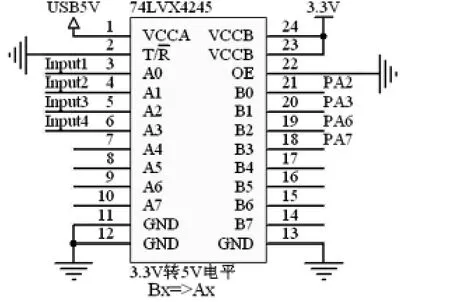
圖7 電平轉換電路Fig 7 Circuit of level conversion
2.5 其他輔助電路
通過USB接口,從計算機獲取穩定的+5V電源,經過電源模塊調整,分別為USB控制器、E2PROM、可見光與不可見近紅外光源、步進電機及驅動、攝像頭等電路提供5,3.3 V和2.5 V電源。
另外還有可見光源與不可見近紅外光源控制的行程開關電路,近紅外光自動調光電路[8]等。
3 圖像采集系統軟件設計
圖像采集系統軟件主要分為USB固件程序、USB驅動程序和上位機圖像采集軟件。
傳感器OV2640的圖像輸出格式為YUV422—UYVY,上位機軟件需要將YUV格式轉換為RGB格式顯示到屏幕上。
由于本設計使用USB控制芯片68013只有56引腳,沒有定時器功能。在固件程序中,控制步進電機轉動的重復脈沖信號只能通過延時程序實現,當紅外濾光片左右移動時,USB控制器暫時停止向計算機傳輸圖像數據。基于這種思想,軟件工作流程如下:
1)上位機圖像采集軟件啟動后,會自動發送視頻傳輸命令。使用者通過接收到的實時視頻,觀察紅外濾光片位置,如濾光片沒有擋在鏡頭上方且可見光亮時,則需按下軟件界面的復位按鈕,軟件發送紅外濾光片右移命令,同時在一段時間(需要根據步進電機轉動頻率而定)內不再實時發送視頻傳輸命令,下位機固件程序接到右移命令后,向電機驅動電路發送脈沖控制信號,驅動步進電機轉動并帶動紅外濾光片離開可見光行程開關,移到鏡頭上方并觸發不可見近紅外光行程開關以使紅外光亮,這時上位機軟件繼續發送視頻傳輸命令并使計算機屏幕能夠動態顯示手指靜脈圖像。
2)擺放好手指后,使用者按下軟件界面圖像采集按鈕,首先保存一幅手指靜脈圖像;然后發送紅外濾光片左移命令(同時在一段時間內不再實時發送視頻傳輸命令),下位機固件程序接到該命令后,控制步進電機轉動并帶動紅外濾光片離開近紅外光行程開關與遮擋鏡頭的位置,隨后觸發可見光行程開關以使可見光亮,這時上位機軟件再繼續發送視頻傳輸命令使計算機屏幕能夠動態顯示指節折痕圖像,同時保存一幅指節折痕圖像。最后,軟件再執行一次復位功能,使濾光片回到遮擋鏡頭位置。
經上述步驟,可實現先后采集手指靜脈與指節折痕2種不同類型的雙模態生物特征圖像。
4 實驗結果
本文設計的手指靜脈與指節折痕雙模態圖像采集系統實物如圖8所示,采集到的圖像如圖9所示。
5 結論

圖8 雙模態圖像采集系統Fig 8 Dual-modal image acquisition system

圖9 手指指節折痕與靜脈圖像Fig 9 Images of finger vein and finger crease
本文設計一種新型基于USB 2.0和CMOS圖像傳感器的雙模態生物圖像采集系統,針對手指同一部位,不僅可以采集皮膚內部的手指靜脈圖像,也可以采集皮膚表面的指節折痕圖像。該系統為非接觸式采集模式,成本低,且能夠在上位機采集軟件中將SVGA(分辨率800×600)圖像模式以24幀/s的視頻形式顯示。因此,該系統采集的2種不同類型圖像,能夠實時提供給手指靜脈與指節折痕雙模態生物特征識別系統進行雙模態識別算法研究與應用。
[1]Lu Yinghua,Fu Yao,Li Jinsong,et al.A multi-modal authentication method based on human face and palmprint[C]∥Future Generation Communication and Networking,2008:193-196.
[2]Fu Yao,Ma Zhixing,Qi Miao,et al.A novel user-specific face and palmprint feature level fusion[C]∥Intelligent Information Technology Application,2008:296-300.
[3]Kouno M,Ueki H,Umemura Shin-ichiro.Near-infrared finger vein patterns for personal identification[J].Applied Optics,2002,41:7429-7436.
[4]Naoto M,Akio N,Takafumi M.Feature extraction of fingervein patterns based on repeated line tracking and its application to personal identification[J].Machine Vision and Applications,2004,15(4):194-203.
[5]Takeda M,Uatoshi S,Hiramatsu K,et al.Finger image identification method for personal verification[C]∥Proceeding of the 10th International Conference on Pattern Recognition,1990:761-766.
[6]Ribaric S,Fratric I.A biometric identification system based on eigenpalm and eigenfinger features[J].Pattern Analysis and Machine Intelligence,2005,27(11):1698-1709.
[7]李 強,裘正定,孫冬梅,等.指橫紋:一種新的生物身份特征[J].自動化學報,2007,33(6):596-601.
[8]管鳳旭,王科俊.基于自動調光功能的手指靜脈圖像采集系統[J].電子技術應用,2010,36(10):120-123.
[9]王晨暉,管鳳旭,宋新景,等.掌紋和三維手形的多模態圖像采集裝置設計[J].自動化技術與應用,2011(7):76-79.
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36
