基于傳感器特征可信度的多信息融合模態研究*
2013-12-07 06:53:48楊劍鋒陳小強
傳感器與微系統 2013年2期
楊劍鋒,周 宇,侯 濤,陳小強
(蘭州交通大學自動化與電氣工程學院,甘肅蘭州730070)
0 引言
多傳感器信息融合(multi-sensor information fusion,MSIF)是在20世紀70年代初因軍事需求而發展起來的一個新興研究領域。由于科學技術的迅猛發展和交通運輸控制系統的復雜化與智能化,該技術在鐵路運輸領域同樣得到了推廣和應用。但是,目前基本上還沒有建立比較完整的多傳感器多信息融合的理論系統框架。2004年,Mahler提出了有限集合統計學(finite set statistics,FISST)理論——隨機集理論的特例,從概率論的角度統一表述了信息融合技術的主要方面,并應用于除信息融合以外的其他領域,如,圖像處理、系統辨識和非線性時間序列預測等[1,2]。
目前,信息融合關心的是如何建立合適的不確定性模型,而不大關心與模型和融合結果相關的可靠性問題[3]。為了避免融合性能的降低,在信息融合的過程中有必要加入可靠性因素。本文針對信息特征的可靠性提出信息的二次融合,并在第一次的獨立傳感器信息融合中加入信息特征可信度約束和不可信信息的剔除;在第二次的多傳感器信息融合中采用一種改進的順序融合方法。
1 獨立傳感器信息質量優化
獨立傳感器是用來接收和感知來自實體目標的信息,根據不同的情況,派生出各自的一系列指標參數。圖1是傳感器的數學模型,可以看出觀測空間獲得來自實體和目標的數據,其中,有狹義觀測的對象,且包含觀測中不可避免的噪聲[4]。
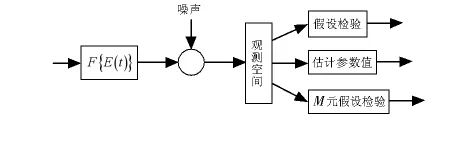
圖1 傳感器信息融合原理Fig 1 Information fusion theory of sensor
而多傳感器信息融合系統則是通過有效地利用多傳感器資源,來最大限度地獲取被探測目標和環境的信息量。因此,將獨立傳感器看作一類線性連續時間的動態系統

式中 t為時間;X(t)∈Rn×1為系統目標狀態向量;A∈Rn×n為系統轉移矩陣;D∈Rn×m為輸入矩陣;V(t)∈Rm×1為零均值高斯白噪聲向量;Q(t)∈Rm×m為噪聲協方差陣。選取融合中心周期為T,以T為標準對連續動態系統進行離散化,可得

式中 tk=kT為第k個離散時刻;X(tk)∈Rn×1為tk時刻目標狀態向量;Φ(tk,tk-1)∈Rn×n為系統轉移狀態矩陣;W(tk,tk-1)∈Rn×1為高斯白噪聲序列,且滿足下列條件

根據以上的離散化思想,并將各測量時刻映射到以融合中心的采樣時間為基準的基準軸上。那么,經測量映射后系統融合周期內各信息間的狀態關系可以表示為

其中,W(ki,ki-1)是零均值高斯白噪聲序列,其協方差為 Q(ki,ki-1)。
設T周期內獨立傳感器的測量數據為X(ki),令X*(ki)為其預測值,根據文獻[5]中關于獨立傳感器信息關聯度的描述,有
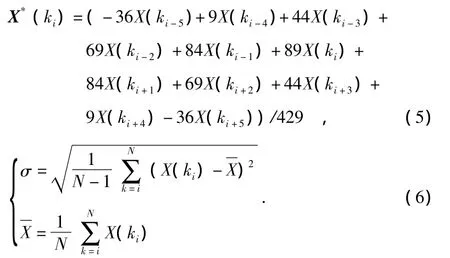
式中 σ為標準差;X為測量值的算術平均值;N為測量點。令 Vk=|X(k)-X*(k)|,那么,當 Vk滿足條件:Vk≥3σ,則判定改點為奇異值點,剔除后以X*(ki)的值來代替該點的測量值。
2 傳感器信息特征選擇融合
傳感器信息特征優化是指從原始的信息特征集合中選取特征子集的過程,其主要任務就是研究如何從眾多特征中求出那些對該信息最有效的、最可靠的特征,從而實現特征空間維數的壓縮。以下是Relief的改進算法遍歷迭代循環算法(All ReliefF),對重要的特征變量進行選取融合[6]。
輸入:傳感器信息特征以向量的形式輸入(向量的每一項代表信息的一個特征)。
輸出:信息的特征向量以權值向量形式輸出(其中,每一個權值代表相應的特征向量)。
1)特征選擇開始,先定義一個權值向量W,且每一維初始化為0;
3)從i=1開始循環迭代,一直到i=m(m是已經設定好的迭代次數);
隨著大眾旅游的興起以及對文化的需求,人民生活水平的提高和國內消費的升級,文化旅游成為新型旅游業態迅速崛起的代表[1]。《中國文化旅游發展報告2017》指出,目前,文化旅游已經進入了以資本、創意和技術為主導的文旅2.0時代。文旅2.0時代的顯著特征是“無中生有、變廢為寶”,其中創新能力在文旅產業發展中起著越來越重要的作用。文旅2.0時代發展的重要特征之一是旅游演藝砥礪前行。2016年以來,作為文化旅游產業的一個重要領域,旅游演藝產業日趨成熟并開始進入調整期[2]。張家界作為國際著名旅游城市,如何在競爭激烈的旅游演藝市場中穩定并發展旅游演藝品牌,是一個亟待解決的問題。
4)從數據集合中隨機選擇一個樣本Ri;
6)尋找Ri的k個最近的同類樣本Hj;
7)對每一個不同于樣本Ri所在類的類別C,尋找Ri在類C中的k個最近的樣本Mj(C);
8)設a代表類別C中的特征維數,a的范圍取[1,n](n是特征總維數)循環,并執行
9)特征選擇結束。
3 可靠性特征融合
在求取每只傳感器的信息估計值 ^X(k|k)以后,可以進行信息分類求取每個特征與其余各個特征的總體相關性大小以后,就可以準確判斷該特征的冗余程度。設Ci是第i類特征信息,P是樣本數,N是特征維數,Xn是訓練樣本。樣本均值為

方差為

則由 ∑ =(Vij)i,j=1,…,N可以生成相關矩陣
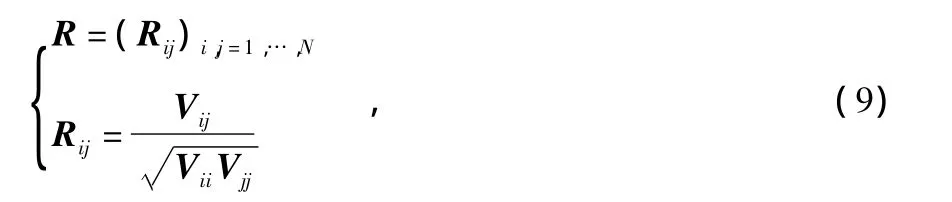
然后,分別計算每個特征對于其余N-1特征的相關系數之和

根據不同特征的j值對信息特征進行分類,并利用類內方差平方和的值來表示某特征下同類樣本的差異。多傳感器線性動態系統的異步采樣系統的最優順序融合估計器為[7]
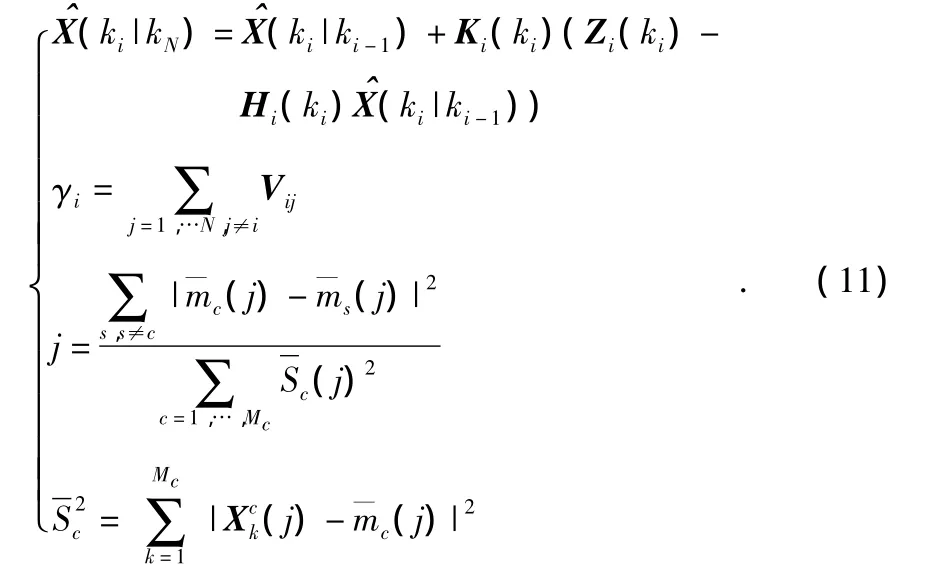
其中,1≤i≤N,k0=k-1,且有
最后令X(k|k)=^X(ki|kN),就可以獲得目標狀態X(k)基于全局信息的估計值 ^X(k|k)。
4 仿真驗證
考慮一個由6只傳感器組成的傳感器系統[8],其融合采樣周期為T=0.6s,假設傳感器1在融合周期內0.1處采樣,傳感器2在0.2 s處采樣,依次類推傳感器6在0.6 s處采樣。傳感器采樣信號模型如下
仿真結果如圖2,可以看到,信息冗余要低于信息順序融合。除噪前后采集信號比較如圖3所示。
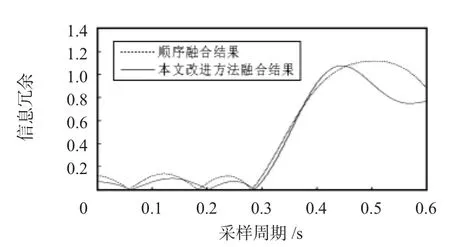
圖2 信息冗余度Fig 2 Information redundancy
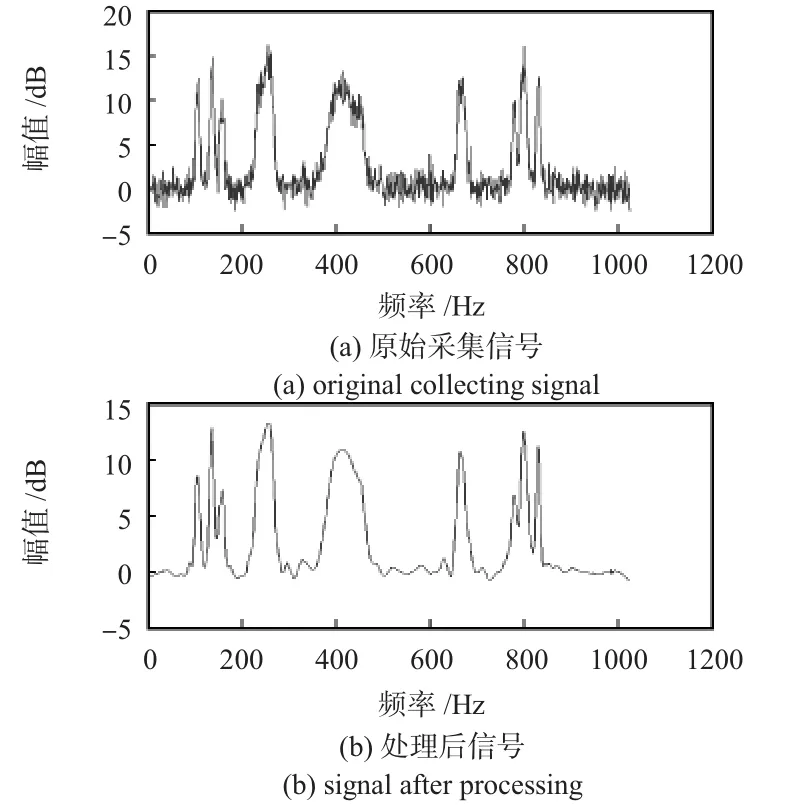
圖3 除噪比較Fig 3 Comparison of de-noising
5 結論
本文提出了基于信息特征可靠性的連續傳感器的二級融合方法,該算法是以信息的可靠性為目標,并在融合過程中有效的控制信息的冗余度。首先,對單個傳感器在其采樣周期內進行奇異值剔除實現信息的第一步除噪。然后,運用改進的融合算法對所有傳感器信息進行特征提取和特征分類。本文的改進信息融合算法,實現簡單,但是在數據的處理運算問題上不能達到很好的時效性,如何提高數據的處理速度和保證數據處理結果的有效性將會是本文信息融合方法未來的研究方向。
[1]何 友,王國宏,彭應寧.多傳感器信息融合及應用[M].北京:電子工業出版社,2000.
[2]彭冬亮,文成林,徐曉濱,等.隨機集理論及其在信息融合中的應用[J].電子與信息學報,2006,28(1l):60-61.
[3]韓崇昭,朱洪艷,段戰勝.多源信息融合[M].北京:清華大學出版社,2006:1-13.
[4]Bar-Shalom Y,Chen H,Mallick M.One-step solution for the multistep out-of-sequence measurement problem in tracking[J].IEEE Transactions on Aerospace and Electronic Systems,2004,40(1):27-37.
[5]趙圣占,高成文,吳曉琳,等.遙測數據處理的野值剔除方法研究[J].強度環境,2005,32(1):60-61.
[6]劉 明,袁保宗,苗振江.一種雙目標排序層分類器融合方法[J].自動化學報,2007,33(12):1276-1283.
[7]Lu Xiaorong,Sachse W,Graber I.Use of an automatic modeler and a small receiver array for acoustic emission source location[J].Ultrasonics,1998,36:539-547.
[8]Howlett PG,Pudney PJ.Energy-efficient train control[M].London:Springer,1995.
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
今古傳奇·故事版(2016年24期)2017-02-07 04:29:04
數學大王·低年級(2014年7期)2014-08-11 16:36:44
河南科技(2014年23期)2014-02-27 14:19:15
