基于掃描線和虛擬格網的LiDAR點云數據非興趣點剔除方法
2013-12-06 08:46:16陳永楓馬桂云靳國旺
測繪工程 2013年6期
陳永楓,徐 青,邢 帥,馬桂云,靳國旺
(1.信息工程大學 測繪學院,河南 鄭州 450052;2.河南省電子產品質量監督檢驗所,河南 鄭州 450003)
機載激光雷達(Light Detection and Ranging,LiDAR)掃描技術是一種全新的獲取高時空分辨率的主動式遙感技術[1],能夠快速地獲取大面積地形數據,生成城市表面模型(Digital Surface Model,DSM)、數字高程模型(Digital Elevation Model,DEM)等數字產品[2-4]。LiDAR技術在海岸線測量、城市規劃、電力系統勘測中也有著廣泛應用,已經成為當前的一個研究熱點。
LiDAR數據在獲取過程中,由于地表物理特征的不同從而產生了不同的后向反射,當發生漫反射時,反射信號會被大量接收,進而形成較大的接收噪聲,也就是粗差[5]。另外空中的飛鳥、不明的空中飛行物、懸浮物等在數據掃描過程中也會引起粗差。由于LiDAR數據是連續、不間斷的掃描,所以點云數據中也包含建筑物的非頂部點,而這些點雖然不是粗差,但在后續建筑物提取過程中會帶來干擾。因此,本文將建筑物的非頂部點云和粗差點一起作為非興趣點,研究其探測和剔除問題。
1 掃描線與虛擬格網相結合的非興趣點剔除方法
傳統的機載LiDAR數據粗差剔除算法,主要是將測區地形模擬成一個平滑的數學曲面模型——趨勢面模型。通過計算測區內趨勢面的值與實際的計算值之間的差異進而判定是否為粗差點[6]。這種方法對于地形較為平坦的測區能夠取得比較好的效果,但是對于地形復雜的地區,如含有較多建筑物的城區,由于其構成的趨勢面不能真實客觀地顯示出實際的情況,因此,剔除非興趣點的效果不理想。為了使剔除算法受地形因素的影響較小,能夠很好地去除單點粗差、粗差點簇,以及不感興趣的建筑物非頂部點,本文提出了一種掃描線和虛擬格網相結合的方法,通過對數據的試驗和結果的比對,驗證方法的可行性。
1.1 基于掃描線粗差剔除方法原理
目前,LiDAR數據的獲取主要通過3種掃描方式:有線掃描、圓錐掃描、纖維光學掃描。而有線掃描作為最常見的一種掃描方式,使得激光腳點在地面上形成“Z”字型[1,7],本文的算法也是針對這種數據進行處理。對于獲取的測區數據,雖然在測區當中會因為植被、建筑物的原因,掃描點會產生高程變化,但是連續的3個掃描點在高程變化上存在一定的規律,其變化情況一般分為圖1所示的5種情況。圖1(a)為沒有產生高程突變的地形,此時的連續3個掃描點高程一般相等或者有微小的高程變化。其余4種情況均表示當遇到房屋等高大建筑物后,連續掃描點的高程排列情況。從圖中可以很容易看出,在這時連續的掃描點之間會因為建筑物的原因而產生很大的高程值變化。5種點云排列是正確的排列方式,當中間的點與其前后的兩個點相比較高程過大或者高程過小時,則將其視為粗差點并予以剔除。
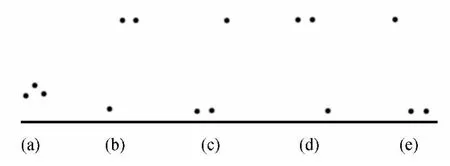
圖1 連續3個掃描點的分布情況
常見的機載LiDAR測量系統如TopoSys激光腳點密度為4點/1m2,Fli-Map1系統達到了9點/1m2,而ALTM1020TS系統腳點密度僅為1點/6m2[1]。對于掃描線的粗差剔除其點云密度為

其中:N為總的點云數量;L,W分別為x,y方向的距離。根據P的大小設定一個合理的閾值,一般密度高于2點/1m2的閾值設定為1m,低于此值的閾值可以根據實際適當放大。遍歷數據內所有點云,剔除單點粗差。
對基于掃描線的粗差剔除方法可以將數據中產生的單個點的噪聲正確剔除,但是對于連續的粗差點簇、非建筑物頂部點該方法就無能為力了。為此本文在掃描線法處理基礎之上,采用了一種基于虛擬格網的非興趣點剔除方法,剔除剩余的非興趣點。
1.2 基于虛擬格網的非興趣點剔除方法原理
算法通過引用虛擬格網,對每個格網及其周圍相關格網的數據進行分析,將剩余的非興趣點剔除,算法流程如圖2所示。
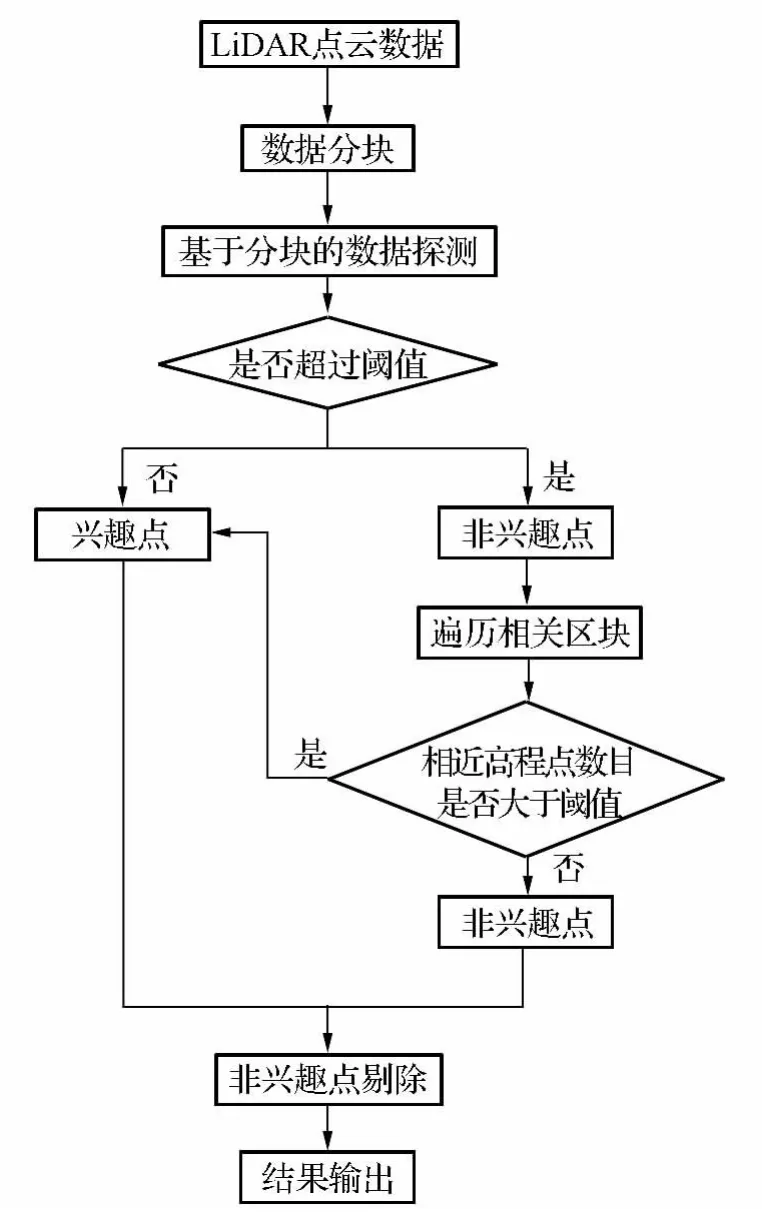
圖2 基于虛擬格網的算法流程
該算法具體步驟如下:
1)數據分塊。首先根據具體測區定義一個區塊的邊長大小d,然后遍歷每一個點云坐標對其進行分塊,得到每個點所對應的行列號C,R,進而得到其所在區塊的位置。
式中:x′,y′為點云坐標;x,y為左下角的點云坐標。定義一個容器,動態存取點云數和區塊數,將三維坐標動態地存入所在的區塊中。
2)候選非興趣點探測。整個測區進行分塊后,由于每一個區塊相對于整個測區面積很小,區塊內的坐標點空間距離又最為接近,可以將每一個區塊作為一個單元進行處理。通過遍歷每一個區塊獲得各個區塊的平均高程值。然后將每個區塊的點云高程與平均高程做比較,設定一個合理的閾值,超過該閾值的坐標點將其暫定為非興趣點,作為接下來進一步比較的對象,在閾值范圍內的點表示為興趣點將予以保留。
3)非興趣點篩查。在上一步的處理中,被標定為非興趣點的有3種情況。第1種就是粗差點,因為這些點的高程值和平均高程值比較肯定是過大或者過小。第2種是該點是非頂部的建筑物點云,因為機載LiDAR掃描的只是建筑物的輪廓,所以其非頂部點云數量在整個區塊中權重較低,經過與平均高程比較后認為是非興趣點。第3種是因為該區塊位于一個高程突變的位置,而該點又是一個高樓頂部的邊緣興趣點,區塊的大部分點云是地面點的情況下,經過與平均高程值比較后也會視為非興趣點。對于粗差點和建筑物非頂部點,如果搜索該點相鄰的區塊,一般不會找到或者很少找到相近的高程值。而對于建筑物的頂部點云,因為該點只是在本區塊內的建筑物邊緣點,所以在相鄰區塊內可以找到很多高程值相近的坐標點。根據區塊的大小和密度設定閾值大小為P×d×d/8(即區塊內總點數的1/8)。遍歷點云,當經過相關搜索后,相近高程數目超過這個閾值,則將該坐標點重新視為興趣點。
2 非興趣點剔除試驗
本文試驗數據為城區地形(見圖3(a)),數據中含有較大的建筑物,平地和建筑物變化較為突出。圖中紅色橢圓標記的部分為比較明顯的粗差單點和粗差點簇,建筑物非頂部點明顯。剔除非興趣點前后效果如圖3所示。
通過圖3(b)可以看出橢圓處標記的比較明顯的粗差單點、點簇被剔除。圖4為剔除前后的直方圖數據分析,可以看出在運用本算法對數據處理之后,數據的極大、極小值得到了有效去除,因為建筑物非頂部點剔除的原因,使得數據總體表現為較低的地面點和植被以及高大的建筑物頂部點云,從而使平均值減小,均方差數值變大。表1分析了算法剔除前后較高點和較低點的點云數目比對,通過變化統計可以看出,大部分地面點云和建筑物頂部點云在數據剔除前后變化不大,被很好地保留下來。非建筑物頂部點云的數量在剔除前后變化十分顯著,說明通過本算法非建筑物頂部點云得到了有效剔除。最后通過變化比例分析,變化比例占總點云數比例可以看出算法具有較好的針對性,剔除的僅僅是非興趣點。
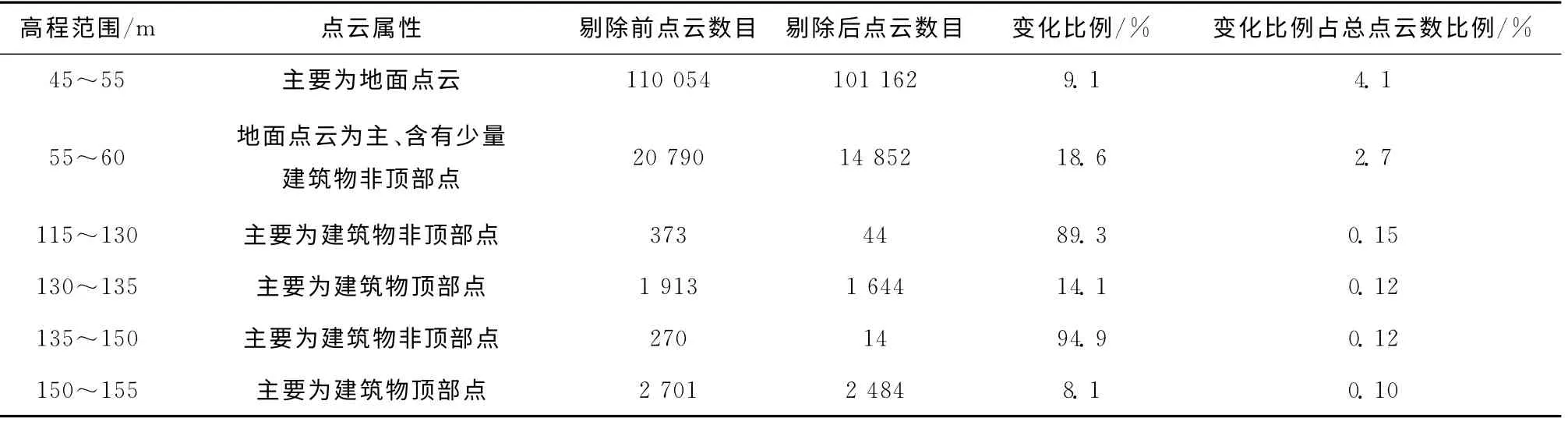
表1 直方圖數據分析

圖3 非興趣點剔除前后三維顯示對比
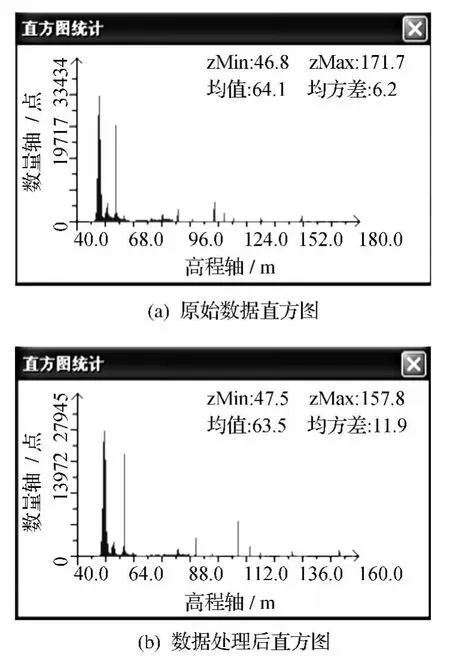
圖4 粗差剔除前后直方圖對比
3 結束語
本文結合數據中非興趣點的特點,提出了一種基于掃描線和虛擬格網相結合的方法。通過對高程急劇變化的城市區域的試驗分析,證明本算法與以往的算法相比,受地形因素的影響較小,具有較強的適應性。另外以往的機載LiDAR預處理工作主要是對粗差進行剔除,本文結合建筑物三維重建只關心頂部點云的特點,提出了一種對非興趣點剔除的方法,簡化了后續工作的處理。在剔除過程中閾值的選擇是根據區塊的大小設定的,個別非建筑物頂部點云與頂部點云比較接近而被保留,下一步對這些點如何有效地去除,有待進一步研究。
[1]張小紅.機載激光雷達測量技術理論與方法[M].武漢:武漢大學出版社,2007.
[2]李英成,文沃根,王偉.快速獲取地面三維數據的LiDAR技術系統[J].測繪科學,2002,27(4):35-38.
[3]PETZOLD B,REISS P,ST?SSEL W.Laser Scanningsurveying and Mapping Agencies AreUsing a New Technique for the Deviation of Digital Terrain Models[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(2/3):95-104.
[4]QUNSHAN SHI,QING XU,SHUAI XING,et al.A Vector Collection Method Based on LiDAR Point Cloud Data[C].International Symposium on Image and Data Fusion,Teng chong,2011.
[5]劉春,陳華云,吳杭賓.激光三維遙感的數據處理與特征提取[M].北京:科學出版社,2009.
[6]吉長東,韓艷順,何孝瑩,等.大區域離散型DEM源數據粗差探測與剔除[J].測繪通報,2006(2):27-29.
[7]李鵬程,王慧,劉志青,等.一種基于掃描線的數學形態學LiDAR點云濾波方法[J].測繪科學技術學報,2011,28(4):274-277.