基于行星傳動調(diào)速的波浪補償系統(tǒng)設計與樣機研制
2013-12-05 06:56:30徐小軍胡永攀
中國機械工程 2013年5期
徐小軍 陳 循 胡永攀
國防科學技術大學,長沙,410073
0 引言
在進行海上并靠補給吊裝作業(yè)時,海浪的起伏會造成沖擊和碰撞,給海上對駁吊裝的效率和安全性帶來不利影響。波浪補償是指針對因水面起伏引起作業(yè)裝備產(chǎn)生波動而進行的補償校正。波浪補償系統(tǒng)是波浪補償功能具體實現(xiàn)的裝備,它能使吊裝作業(yè)不受水面波浪起伏的影響,從而增強海上作業(yè)的安全性、高效性和可靠性。波浪補償系統(tǒng)具體結構形式多種多樣,但按控制力的執(zhí)行方式可分為被動式波浪補償系統(tǒng)和主動式波浪補償系統(tǒng)兩種基本類型[1-2]。目前國內(nèi)已經(jīng)開發(fā)了幾種被動式波浪補償系統(tǒng)并成功應用于海上并靠補給作業(yè)。相對于主動式波浪補償系統(tǒng),被動式波浪補償系統(tǒng)存在補償范圍受補償設備行程的限制,補償負載受儲能裝置壓力的限制,且需要配備額外體積龐大的輔助裝置等問題[3]。國內(nèi)針對主動式波浪補償系統(tǒng)的研究主要處于實驗和仿真階段[4]。
本文提出的“基于行星傳動的主動式波浪補償系統(tǒng)”采用一種全新的補償方式,利用行星傳動機構的調(diào)速特性,將波浪補償功能集成于吊裝起重機上,將所有機械系統(tǒng)整合于一臺行星傳動調(diào)速器上,無需其他輔助裝置,采用基于前饋補償—反饋校正的波浪補償復合控制方法實現(xiàn)主動式波浪補償。
1 基于行星傳動調(diào)速的波浪補償系統(tǒng)工作原理
基于行星傳動調(diào)速的主動式波浪補償系統(tǒng)由控制系統(tǒng)、檢測系統(tǒng)、電液伺服驅(qū)動系統(tǒng)和機械執(zhí)行系統(tǒng)等四個子系統(tǒng)構成,如圖1所示。
控制系統(tǒng)由硬件開發(fā)平臺和軟件系統(tǒng)構成,根據(jù)補給裝置輸入量、船舶姿態(tài)運動量和反饋量,通過一定的控制算法實現(xiàn)對電液伺服系統(tǒng)的控制。
檢測系統(tǒng)由高性能傳感器及數(shù)據(jù)處理單元構成,實現(xiàn)船舶姿態(tài)運動、繩索張力以及重物位移、速度等信號的實時檢測。根據(jù)驅(qū)動控制量的不同,液壓驅(qū)動系統(tǒng)分為主驅(qū)動電液伺服系統(tǒng)和副驅(qū)動電液伺服系統(tǒng),分別輸入主控信號(即補給裝置輸入量)和補償信號。
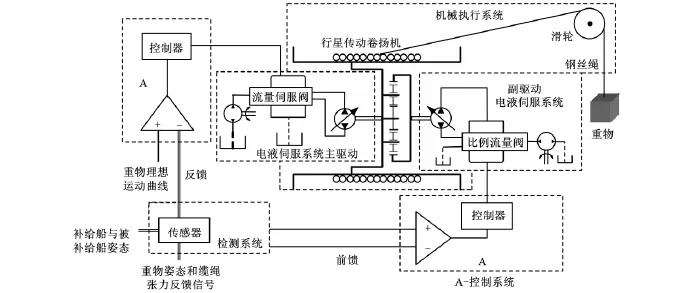
圖1 基于行星傳動調(diào)速的主動式波浪補償系統(tǒng)
機械執(zhí)行系統(tǒng)則由行星傳動調(diào)速卷揚機、離合制動器、繩索、滑輪組及起重架等組成,是實現(xiàn)物資補給的最終裝置。
波浪補償起重機需要實現(xiàn)平穩(wěn)吊裝作業(yè)功能,因此必須補償由波浪引起的兩船相對速度,該補償速度的大小等于兩船因波浪起伏引起的相對速度。基于行星傳動調(diào)速的波浪補償系統(tǒng)基本工作原理為:主驅(qū)動端的控制與普通液壓起重機相同,副驅(qū)動端(實現(xiàn)繩索始終張緊的波浪補償驅(qū)動端)用來實現(xiàn)波浪補償功能;當兩側(cè)液壓馬達同向驅(qū)動時卷揚機轉(zhuǎn)速增加,當兩側(cè)液壓馬達相互反向驅(qū)動時卷揚機轉(zhuǎn)速降低;在正常工作狀態(tài)下使用主驅(qū)動完成正常的升降工作,當海浪波動較大時,啟動副驅(qū)動便形成波浪補償系統(tǒng),使得繩索始終處于張緊狀態(tài)。具體工作過程如下:
(1)檢測系統(tǒng)檢測到兩船舶姿態(tài)運動參數(shù)、起重繩索張力和重物運動參數(shù),將數(shù)據(jù)傳遞給控制系統(tǒng)。
(2)控制系統(tǒng)根據(jù)補給速度參考信號、船舶姿態(tài)運動信號和反饋信號,經(jīng)控制器運算后輸出各種控制信號,分別控制主副驅(qū)動電液伺服系統(tǒng)。
(3)電液伺服系統(tǒng)根據(jù)控制信號決定比例閥的開口大小和方向,進而決定液壓馬達的轉(zhuǎn)速和轉(zhuǎn)向,機械執(zhí)行系統(tǒng)通過行星傳動調(diào)速器完成補給速度vS和補償速度vC的合成運算,實現(xiàn)波浪補償功能。
(4)檢測系統(tǒng)不斷將檢測到的載荷以及船舶實際姿態(tài)運動參數(shù)、起重繩索張力等信息反饋給控制系統(tǒng),控制系統(tǒng)根據(jù)誤差和誤差變化率的大小再計算出下一周期控制信號的大小,并將其傳遞給電液伺服系統(tǒng),進行下一周期的控制。
2 基于前饋補償—反饋校正的波浪補償復合控制策略
主動式波浪補償控制系統(tǒng)的目的是保證重物在波浪起伏的海況下從補給船平穩(wěn)地吊裝到被補給船上。所謂平穩(wěn),具體體現(xiàn)在兩個方面:一是重物的絕對速度不出現(xiàn)急劇變化,起重繩索張力波動不大;二是重物起吊、著落時對甲板的沖擊盡可能小。根據(jù)控制目的及行星傳動調(diào)速波浪補償系統(tǒng)的工作原理,控制系統(tǒng)設計的基本思路是:利用行星傳動調(diào)速器進行主控信號和補償信號的分開處理與復合控制,實現(xiàn)波浪補償;利用高性能DSP控制器實現(xiàn)控制算法和數(shù)據(jù)處理[5]。以船舶相對運動信號作為前饋補償信號,以重物相對被補給船的速度、位移和起重繩索繩張力信號作為反饋校正信號,實現(xiàn)控制系統(tǒng)前饋補償—反饋校正的復合控制。
圖2所示的控制結構框圖表示波浪補償控制系統(tǒng)方案。其中,R(z)為補給船吊鉤的理想運動曲線;Gm1(z)為主驅(qū)動部分(電液伺服驅(qū)動系統(tǒng)和差動行星輪主傳動部分)的傳遞函數(shù);Gm2(z)為副驅(qū)動部分(電液伺服驅(qū)動系統(tǒng)和差動行星輪副傳動部分)的傳遞函數(shù);Gw(z)為卷揚機的傳遞函數(shù);Gs2(z)為卷揚機到滑輪之間(繩索和滑輪)的傳遞函數(shù);Gs1(z)為滑輪到重物之間(繩索和重物)的傳遞函數(shù);L(z)為重物的狀態(tài);C(z)為補給船和被補給船的相對運動姿態(tài);HPID(z)和 HVMP(z)為所要設計的控制器;T(z)為載荷產(chǎn)生的扭矩;M為載荷質(zhì)量。
2.1 反饋控制策略
圖3為反饋控制傳遞函數(shù)框圖。其中,Rv(z)為rv(t)的Z變換(余同),rv(t)為控制系統(tǒng)參考輸入量,為給定的補給速度,由其產(chǎn)生的閉環(huán)輸出響應yv(t)為重物的實際補給速度;T為繩索張力;N(z)為張力變化值;控制器H的作用一是實現(xiàn)給定補給速度rv(t)的跟蹤控制,二是把繩索張力T作為一個反饋控制的輔助手段,從繩索張力T中剔除由于補給船加速度的變化導致的張力變化部分(設為Te),通過修正給定的補給速度rv(t),使得重物在下降過程中繩索張力T的變化幅度控制在一定的范圍內(nèi),并且重物與甲板接觸時Te不發(fā)生急劇的下降,從而避免對被補給船形成沖擊。

圖2 控制結構框圖
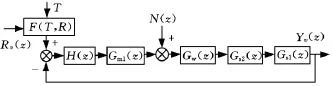
圖3 反饋控制子系統(tǒng)
反饋控制系統(tǒng)的閉環(huán)輸出傳遞函數(shù)為

2.2 前饋控制策略
主動式波浪補償控制系統(tǒng)的目的是要補償由波浪造成的重物與被補給船之間的相對運動速度,使重物按照給定的補給速度向被補給船甲板降落。要達到這個目的,必須獲得補給船和被補給船之間的相對運動姿態(tài)c(t),由c(t)產(chǎn)生的系統(tǒng)輸出響應為yc(t),系統(tǒng)的前饋控制框圖見圖4。
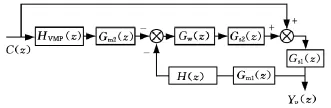
圖4 前饋控制子系統(tǒng)
由圖4所示的控制框圖可得前饋控制傳遞函數(shù)為

前饋控制的目的是使船舶姿態(tài)相對運動量c(t)所導致的系統(tǒng)輸出yv(t)為零,從而使得貨物能夠在反饋控制器的作用下不受波浪的干擾,相對被補給船勻速下落。也就是說,在前饋控制器的作用下,使得前饋傳遞函數(shù)Yv(z)/C(z)=0。
3 波浪補償數(shù)學模型
3.1 液壓馬達
液壓馬達轉(zhuǎn)速的計算公式為

式中,n為液壓馬達的轉(zhuǎn)速;q為液壓系統(tǒng)的流量;Vm為液壓馬達的排量。
實際工程中,考慮液壓馬達確定后其排量Vm便唯一確定,得知液壓馬達的轉(zhuǎn)速n為輸入流量q的一元函數(shù)關系式,可將式(3)改寫為

流量q由伺服閥的輸入電流和系統(tǒng)壓力決定,流量方程為

式中,I為伺服閥的輸入電流;pf為系統(tǒng)壓力,對特定的波浪補償系統(tǒng),為保持液壓系統(tǒng)工作的穩(wěn)定性,通常設定為一具體恒定值;KQ、Kc分別為與系統(tǒng)結構有關的系數(shù)。
式(5)實際為因變量q和自變量I的一元關系式,可改寫為

3.2 行星傳動調(diào)速器
如圖5所示,圖中,a為太陽輪,b為內(nèi)齒圈,g為行星輪,H為行星架。假設行星傳動調(diào)速器輸入轉(zhuǎn)速為na、nb,輸出轉(zhuǎn)速為nw,則理想輸入輸出關系為

式中,za、zb分別為太陽輪a與內(nèi)齒圈b的齒數(shù);Rw為卷揚機滾筒半徑;vw為輸出線速度,即繩索始端速度。
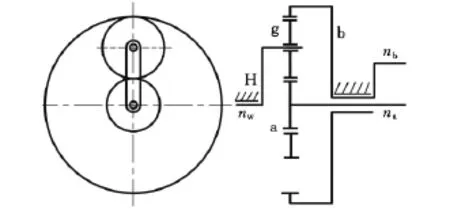
圖5 行星傳動調(diào)速器差動傳動原理
3.3 波浪補償變量傳遞關系
由檢測系統(tǒng)可得到以下變量:繩索張力變動量ΔT,被補給船與補給船之間的相對升沉運動速度變動量Δυ,繩索末端重物升降速度變動量Δvw。
按(ΔT,Δυ,Δvw)確定的三維向量考慮,則存在傳感器輸出信號量ξ,使得

式中,ξ為傳感器輸出信號量矩陣;Fξ為傳感器組的特征變換函數(shù)結構矩陣。
已知檢測信號量(ΔT,Δυ,Δvw)、補償期望目標值(υs,Ts)(即設定誤差),可由控制系統(tǒng)求解器得到確定的控制量矩陣 —— 向量值(I,q,n,…),寫成結構關系式即為

式中,I為電液伺服系統(tǒng)的控制電流向量;FDSP為DSP特征變換函數(shù)結構矩陣;υs為速度補償期望值;Ts為張力補償期望值。
因此,波浪補償系統(tǒng)在一次信號調(diào)制過程中的變量傳遞關系表現(xiàn)為以下過程:

波浪補償系統(tǒng)按式(10)完成一個循環(huán)的信號調(diào)制、變量傳遞,實現(xiàn)一個周期的波浪補償,如此反復循環(huán)。聯(lián)立式(3)、式(6)、式(9),整理即得到波浪補償系統(tǒng)變量特征傳遞關系:
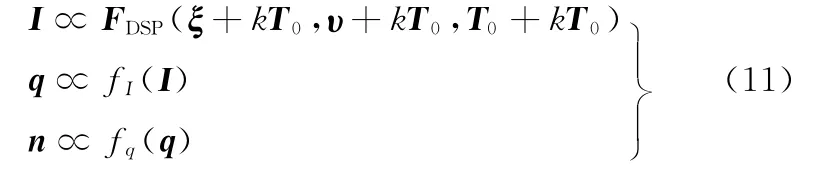
式中,T0為循環(huán)周期時間長度;k為循環(huán)周期數(shù)量。
4 行星傳動調(diào)速波浪補償樣機
4.1 行星傳動調(diào)速器
原型試驗樣機所用行星傳動調(diào)速器基本齒輪參數(shù)如下:模數(shù)m=2,齒形壓力角α=20°,行星輪齒數(shù)zg=29,太陽輪齒數(shù)za=19,內(nèi)齒圈齒數(shù)zb=77。設計繩索滾筒直徑為164mm,滾筒寬度為65mm,行星架回轉(zhuǎn)直徑為48mm。其余結構件尺寸設計以上述參數(shù)為基礎,充分考慮連接、承載能力特性要求等條件,設計并試制的行星傳動調(diào)速器如圖6所示。

圖6 行星傳動調(diào)速器實物圖
4.2 電液伺服驅(qū)動系統(tǒng)
基于行星傳動調(diào)速的主動式波浪補償液壓驅(qū)動系統(tǒng)控制回路如圖7所示,它主要實現(xiàn)起重和補償兩個動作的功能控制。其中波浪補償回路是最重要的,其本質(zhì)是一個電液伺服系統(tǒng),基本參數(shù)如下:系統(tǒng)壓力6.3MPa,馬達轉(zhuǎn)速0~160r/min,馬達輸出扭矩50N·m,穩(wěn)態(tài)精度不超過5%,響應時間不超過0.4s。
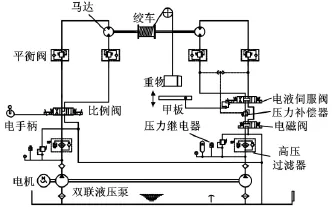
圖7 液壓系統(tǒng)原理圖
4.3 船舶姿態(tài)檢測系統(tǒng)
基于行星傳動調(diào)速的波浪補償檢測系統(tǒng)組成如圖8所示。檢測系統(tǒng)主要完成兩方面的信號檢測:
(1)船舶運動姿態(tài)信號檢測。補給船A和被補給船B分別安裝加速度傳感器,檢測各自的升沉和縱搖運動狀態(tài)。
(2)補給裝置反饋信號檢測。反饋信號包括重物相對于被補給船的速度信號、繩索張力信號。
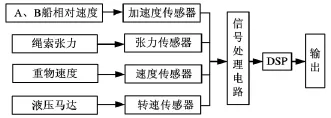
圖8 波浪補償檢測系統(tǒng)
5 試驗驗證
如圖9所示,基于行星傳動調(diào)速的波浪補償原型樣機試驗系統(tǒng)由行星傳動調(diào)速卷揚機、船舶姿態(tài)模擬平臺、DSP控制器、液壓馬達和傳感器等組成。

圖9 波浪補償原型樣機試驗系統(tǒng)
船舶姿態(tài)模擬平臺要求能夠?qū)崿F(xiàn)升沉和傾斜兩個自由度的運動,用來模擬甲板的升沉和縱傾。升沉運動采用正弦機構(曲柄滑塊機構)來實現(xiàn),傾斜運動采用凸輪機構實現(xiàn)。升沉為正弦運動,幅值為±0.6m,周期為5~10s;傾斜角度為0~5°,周期為5~10s。
5.1 動態(tài)特性試驗
動態(tài)特性試驗的目的是通過在“理想狀態(tài)”下測試原型樣機對階躍信號和正弦信號的響應,得到原型樣機的響應時間、穩(wěn)態(tài)誤差等動態(tài)特性參數(shù),從而驗證電液伺服系統(tǒng)的控制原理和控制算法的正確性。其中“理想狀態(tài)”是指:假設調(diào)速器無傳動誤差,波浪起伏引起的船舶相對運動速度為理想狀態(tài)下的階躍輸入和正弦輸入。
(1)對階躍信號的響應。使用信號發(fā)生器給伺服閥輸入一個階躍信號,通過旋轉(zhuǎn)編碼器測量行星傳動調(diào)速器兩輸入端的轉(zhuǎn)速,得到原型樣機對階躍信號的響應,如圖10a所示。可以看出,主動式波浪補償系統(tǒng)對階躍信號的響應曲線是無超調(diào)的,響應時間約為0.5s,穩(wěn)態(tài)誤差小,滿足設計指標要求。
(2)對正弦信號的跟隨。使用信號發(fā)生器在伺服閥的輸入端輸入一個正弦信號,通過旋轉(zhuǎn)編碼器測量行星傳動調(diào)速器兩輸入端的轉(zhuǎn)速,得到原型樣機對正弦信號的跟隨情況,如圖10b所示,可以看出,液壓伺服系統(tǒng)對正弦輸入信號的響應較好,跟蹤時滯約為0.2s,滿足設計指標要求。
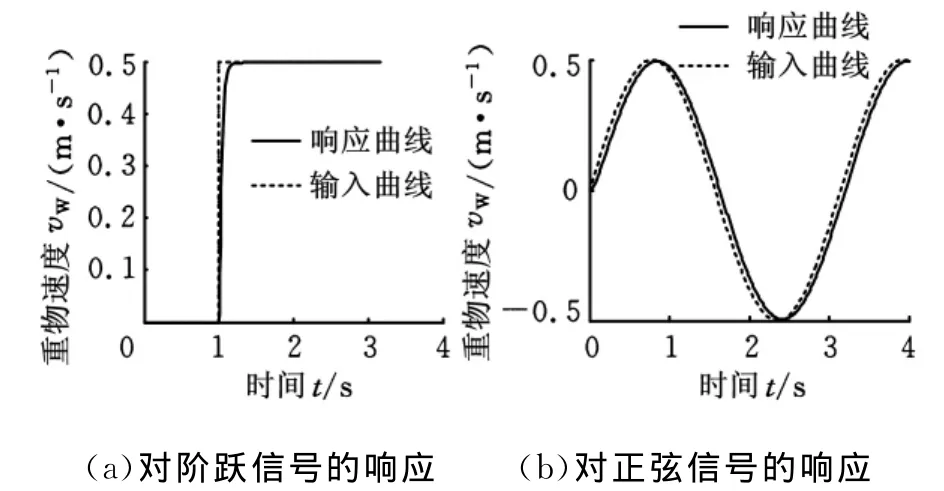
圖10 原型樣機對階躍信號與正弦信號的響應
(3)正弦信號輸入下繩索張力變化。使用信號發(fā)生器在伺服閥的輸入端輸入一個正弦信號,通過張力傳感器測量繩索的張力,得到繩索張力對正弦信號的跟隨情況,如圖11所示,可以看出,張力在一定范圍內(nèi)波動,繩索始終保持在張緊狀態(tài)。此外試驗還表明,繩索張力的變化除了與系統(tǒng)動態(tài)特性有關外,還與繩索的材料等屬性有關。

圖11 繩索張力對正弦信號的響應
5.2 波浪補償試驗
為了驗證波浪補償效果,通過原型樣機試驗系統(tǒng)進行了多種條件下的波浪補償試驗。
設計波浪補償系統(tǒng)作業(yè)過程的補給速度曲線,分為加速啟動、穩(wěn)定運行和減速制動過程。其中,勻加速啟動時間1s,減速制動時間0.1s,穩(wěn)定運行速度為0.5m/s,如圖12所示。圖13所示為波浪補償系統(tǒng)運行全過程的試驗結果曲線,運動干擾信號頻率為0.2Hz。 在 不 同 頻 率(低頻f=0.05Hz,高頻f=2Hz)的船舶運動情況下進行了波浪補償系統(tǒng)穩(wěn)定運行試驗。
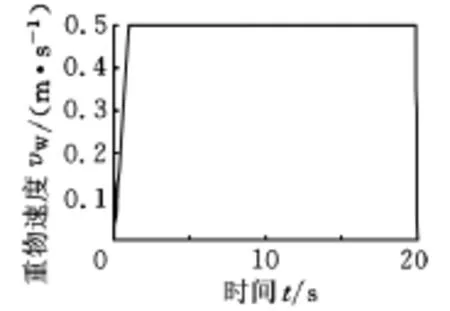
圖12 補給作業(yè)速度參考曲線
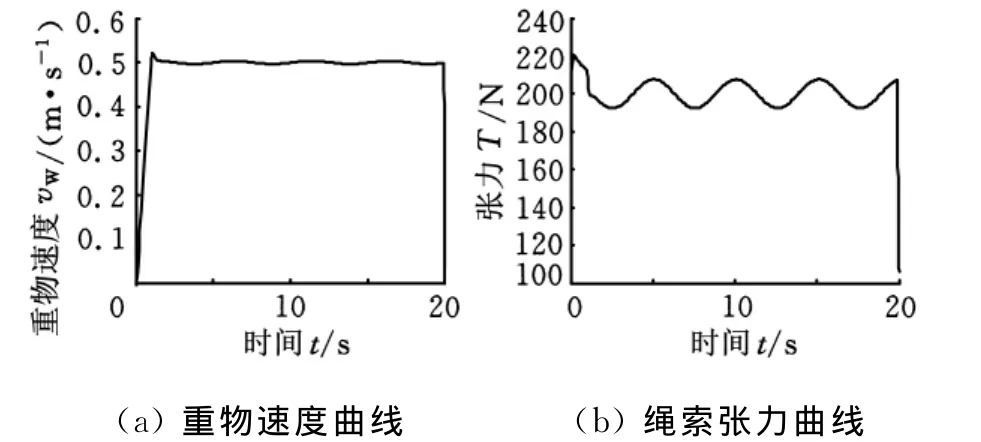
圖13 原型樣機波浪補償曲線
5.3 試驗結果分析
在試驗過程中,采用了圖12所示的補給速度控制曲線。考慮補償系統(tǒng)對快速制動要求很高,因此曲線的速度下降部分變化很快。圖13表明波浪補償系統(tǒng)的啟停控制效果良好,響應時間為0.18s,速度穩(wěn)態(tài)誤差僅1.5%,張力穩(wěn)態(tài)誤差僅為1%,完全符合原型樣機技術指標要求。
從圖14和圖15可以看出,補償系統(tǒng)在穩(wěn)定運行過程中,船舶運動信號對補償效果和系統(tǒng)控制性能影響很大。在低頻條件下,系統(tǒng)能高精度地補償船舶運動干擾,而在高頻條件下重物呈現(xiàn)微幅振蕩,繩索張力也變化頻繁,此時系統(tǒng)的補償精度降低。在高頻f=2Hz的情況下,速度誤差范圍小于10%,繩索張力變化范圍小于7.5%,因此仍然符合設計要求。
在真實海況下,船舶的運動頻率偏低,因此對整個系統(tǒng)而言,波浪補償效果比較滿意,試驗結果基本能夠滿足波浪補償系統(tǒng)控制需要。
6 結論
(1)本文設計的基于行星傳動的波浪補償系統(tǒng)能及時跟隨模擬波浪的運動變化。
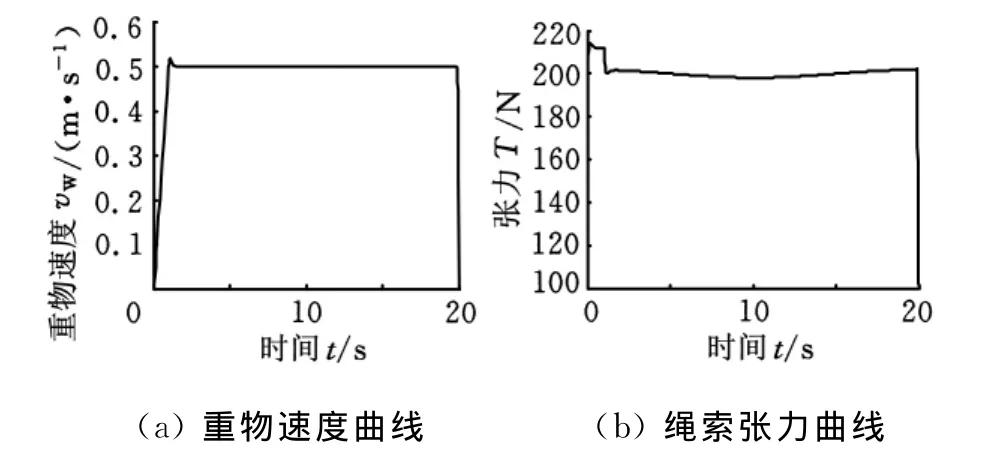
圖14 船舶低頻運動干擾結果
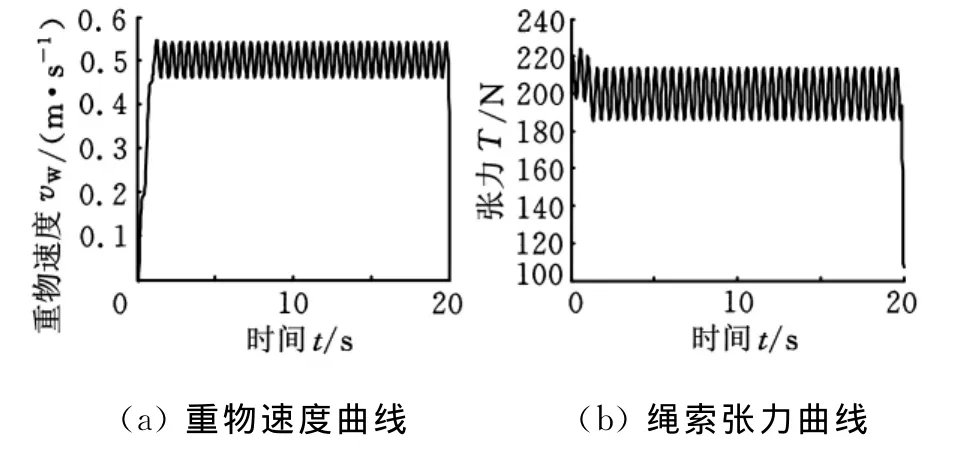
圖15 船舶高頻運動干擾結果
(2)原型樣機在波浪補償?shù)倪^程中,繩索始終有張力存在,繩索不會出現(xiàn)松弛現(xiàn)象。
(3)按照本文提出的設計理論和分析方法建立的基于行星傳動調(diào)速的波浪補償系統(tǒng)基本滿足復雜海況條件下吊裝作業(yè)的要求。
[1]Drevdal K E.Active Heave Drilling TM-a New Standard in Heave Compensation Technology[S].HITEC,2001.
[2]Sagatun S I,Johansen T A.Wave Synchronizing Crane Control during Water Entry in Offshore Moonpool Operations-Experimental Results[J].IEEE Journal of Oceanic Engineering,2003,28(4):720-728.
[3]Otani A,Yoshitomi T.Vertical Seismic Response of Overhead Crane[J].Nuclear Engineering and Design,2002,212(1/3):211-220.
[4]賀可太.海上波浪補償起重機控制研究[D].北京:北京航空航天大學,2000.
[5]徐小軍,何平,陳循,等.基于DSP的主動式波浪補償起重機控制系統(tǒng)設計[J].國防科技大學學報,2008,30(1):110-114.Xu Xiaojun,He Ping,Chen Xun,et al.Design of Control System for an Active Heave Compensation Crane with DSP[J].Journal of National University of Denfense Techonogy,2008,30(1):110-114.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
