基于6-DOF并聯機器人醫療器械道路運輸模擬平臺的關鍵技術及實現
2013-12-05 09:36:56裴毅東裴葆青李慧樊瑜波
中國醫療器械雜志 2013年1期
【作 者】裴毅東、裴葆青,李慧,樊瑜波
北京航空航天大學 生物與醫學工程學院,北京市,100191
0 引言
在醫療器械向鄉鎮、農村等基層地區的運輸過程中,路途的顛簸、振動[1]等特殊的運輸路況通常對醫療器械產生危害作用,使醫療器械可靠性發生變化,成為導致失效的主要環境因素。
目前國內在醫療器械道路運輸的研究方面,還未出現專門的用于醫療器械道路運輸的模擬平臺,更多的方法是使用傳統的振動試驗機作為替代品或從國外引進道路模擬試驗機。對于傳統的振動試驗機,雖然在一定程度上能夠產生振動,但因運動速度、振動幅度及調速方式等因素的影響,其運動的方式僅局限于回轉式或正弦式,單一性的運動方式使其無法根據道路實況實現模擬運動。對于從國外引進的道路模擬試驗機,其功能的設計決定了該試驗機主要用途在于對整車的性能、零部件耐久性進行測試,與醫療器械的道路運輸研究有一定的偏差,而且這種試驗機操作復雜、價格昂貴。使用6-DOF并聯機器人作為醫療器械道路運輸模擬平臺,不僅能夠準確復現道路運輸中的多種運動規律,真實反映醫療器械道路運輸的運動狀況,而且良好的控制性能和簡便的操作方式,使其能夠針對醫療器械的道路運輸問題開展專業性的研究。
1 平臺組成及工作原理
醫療器械道路運輸模擬平臺由激勵源、6-DOF并聯機器人、醫療器械道路運輸模擬軟件和醫療器械固定裝置四部分組成。其工作原理為:將仿真產生的三維道路譜作為激勵源,轉化為6-DOF并聯機器人所需的運動數據并加載至機器人;通過控制并聯機器人使其能夠高效準確地模擬車輛在不同車速、各種等級路面上的運動。模擬平臺的工作原理如圖1所示。
激勵源是模擬平臺的原始輸入部分,提供了驅動6-DOF并聯機器人完成道路運輸模擬運動所需的原始數據。本文通過改進諧波疊加算法,建立三維道路的路面譜模型,以此作為模擬平臺的激勵源。
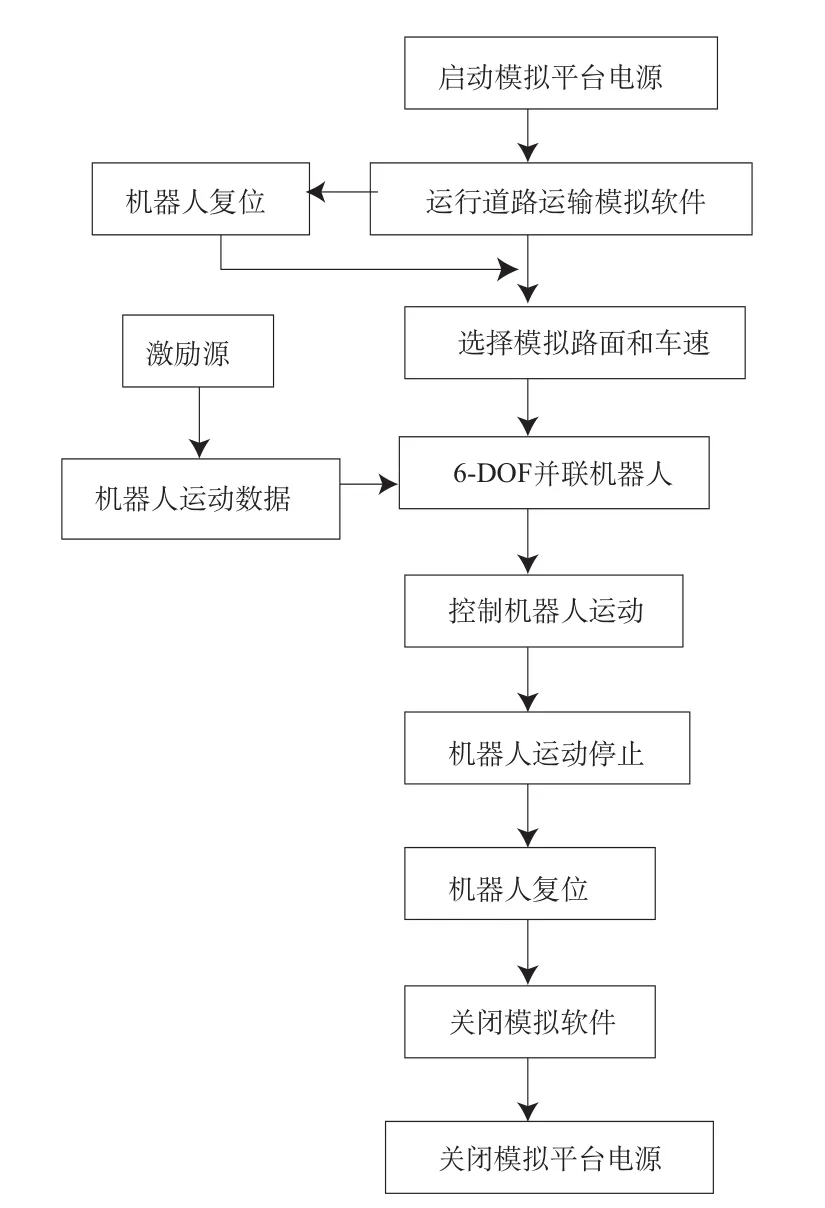
圖1 醫療器械道路運輸模擬平臺工作原理Fig.1 The principle of simulation platform for medical equipment road transportation
6-DOF并聯機器人是整個模擬平臺的一個重要組成部分,由運動控制計算機、驅動裝置和機器人本體三部分組成,如圖2所示。它提供了道路運輸模擬過程中的瞬時過載、重力分量的持續感、運輸過程中的振動和沖擊信息,使道路運輸模擬運動更加逼近醫療器械的真實運輸環境。本模擬平臺使用的6-DOF并聯機器人采用伺服電機驅動,負載能力為200 kg,重復定位精度為±0.1 mm,平動位移定位精度為0.2 mm,轉動角度定位精度為0.02o,機器人在X、Y、Z三個方向的平動位移范圍為±200 mm,繞X、Y、Z三個軸向的轉動角度范圍為±20o,驅動軸最大線速度和角速度分別為200 mm/s和30o/s。
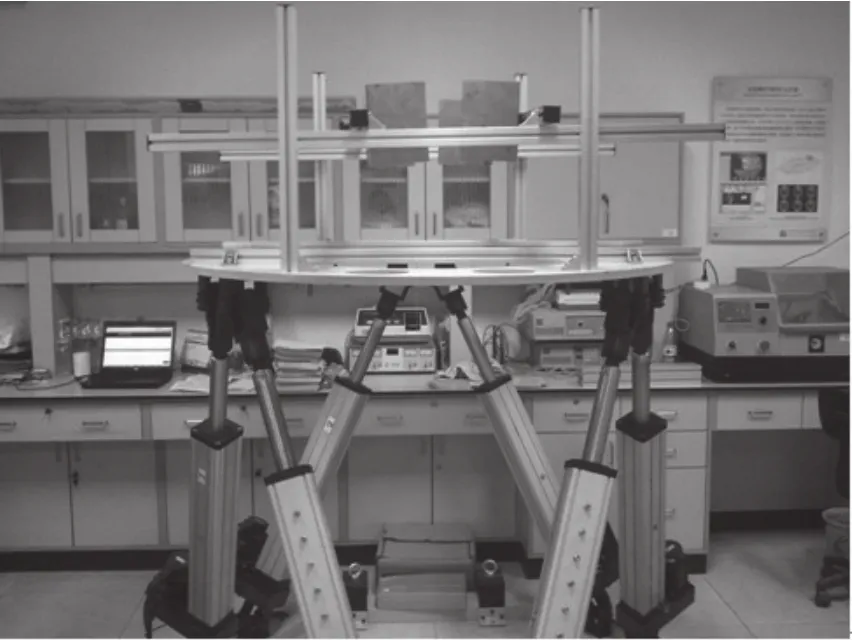
圖2 6-DOF并聯機器人各部分組成Fig.2 The parts of 6-DOF parallel robot
醫療器械道路運輸模擬軟件是模擬平臺的軟件控制部分,其主要功能有:(1)完成模擬平臺的初始化工作;(2)提供模擬平臺所能完成的各種道路等級路面和運輸車輛的車速信息;(3)控制6-DOF并聯機器人在選定的道路等級路面和車速下完成模擬運動;(4)完成6-DOF并聯機器人復位工作以及為機器人模擬運動提供安全保障。
醫療器械固定裝置是模擬平臺中對醫療器械進行固定的裝置,裝置主體部分選用強度高、重量輕、穩定性強的鋁型材作為原材料加工而成。其位置處于6-DOF并聯機器人動平臺上方,并通過螺栓與機器人動平臺固定。該固定裝置不僅對醫療器械具有固定的作用,而且在模擬運輸過程中對所載醫療器械具有保護作用。
2 獲取激勵源
激勵源是根據國家道路等級劃分標準[2]產生的八種道路等級(A-H級)的路面譜數據,其準確性直接影響到道路運輸模擬平臺的性能[3]。本文從空間頻率出發,改進了諧波疊加算法,使之能夠反映車輛運動的動態特性和實際路面隨機特性的三維空間道路譜,并從功率譜密度的角度驗證所建路面模型的有效性,從而保證激勵源的準確性。
2.1 改進的諧波疊加算法
改進的諧波疊加法是針對現有的道路譜仿真模型不符合實際道路隨機分布,各態歷經特性以及缺少車輛行駛動態特性的問題,在原有諧波疊加法基礎上,將仿真模型由路面長度和路面不平度組成的二維模型擴展到由路面的長度、寬度和不平度組成的三維模型,并通過增加車輛速度和相位差的方法建立符合實際路面特性的三維道路譜模型。
按照GB7031-2005[2],路面不平度位移功率譜密度可用冪級數作為擬合表達式:
式中:n0為參考空間頻率,單位為m-1;n0=0.1m-1;Gd(n0)為參考空間頻率n0下的路面不平度系數,單位為m2/m-1;w=2為頻率指數,決定了路面譜的頻率結構。

已知在空間頻率n1<n<n2內的路面位移譜密度為Gd(n),將區間(n1,n2)劃分為n個小區間,取每個小區間的中心頻率nmid-i(i=1,2,...n)處的譜密度值Gd(nmid-i)代替Gd(n)在整個小區間內的值,利用平穩隨機過程的平均功率的頻譜展開性質,路面不平度的方差為:


式中:θ為[0,2π]上均勻分布的隨機數;x為頻域路面方向的值。
車輛行駛是一個動態過程,仿真建立的道路譜模型除包含路面不平度信息外,還需要考慮車輛行駛速度,因此將式(1)轉換為時間功率譜:

其中f =u×n,同理,將f ( f1≤ f≤ f2)劃分為n個區間,用每個區間的中心頻率fi處的功率譜密度值Gd( fi)代替Gd(f)在整個小區間內的值,則可以在時域內用三角級數模擬隨機路面不平度:
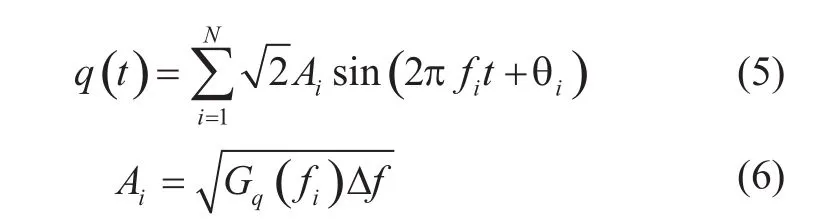
式中θi為[0,2π]的隨機數,t為給定車速下的時間歷程。
為了表示路面的三維特性,需要增加路面的寬度,利用隨機數發生器產生路面長度和寬度兩個方向上的隨機數作為三角級數的相位差。將(5)式轉換為空間域內的諧波疊加式,由于,
將x看作空間點到初始點的距離,式(7)改為:

增加路面寬度,拓展到三維空間后
至此,通過離散路面空間頻域n和時間頻率f,得到了空間頻域和時間域下三維道路譜的數學模型。
2.2 三維道路譜模型仿真與驗證
根據改進諧波疊加法建立的數學模型,將空間頻率(0.011 m-1≤n≤2.83 m-1)劃分為200等分,即 N=200采樣頻率dt=0.003 s。以E級路面為例,產生2 m×100 m區域三維道路譜仿真模型,如圖3所示。選取 y=0.6 m處的x方向路面不平度,將其轉化為時域路面不平度信號,得到E級路面車速為20 m/s時路面不平度曲線,如圖4所示。將仿真生成的車速為20 m/s時E級路面的路面不平度功率譜密度,與標準功率譜譜密度對比,驗證仿真三維路面的有效性。
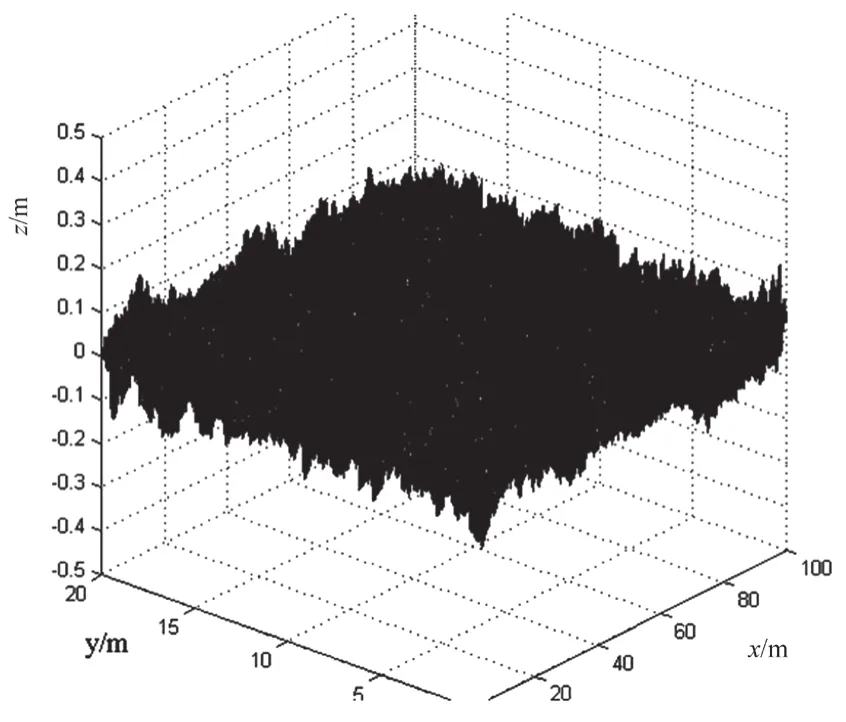
圖3 E級路面三維道路譜仿真模型Fig.3 The simulation model of 3-D road spectrum for E grade road
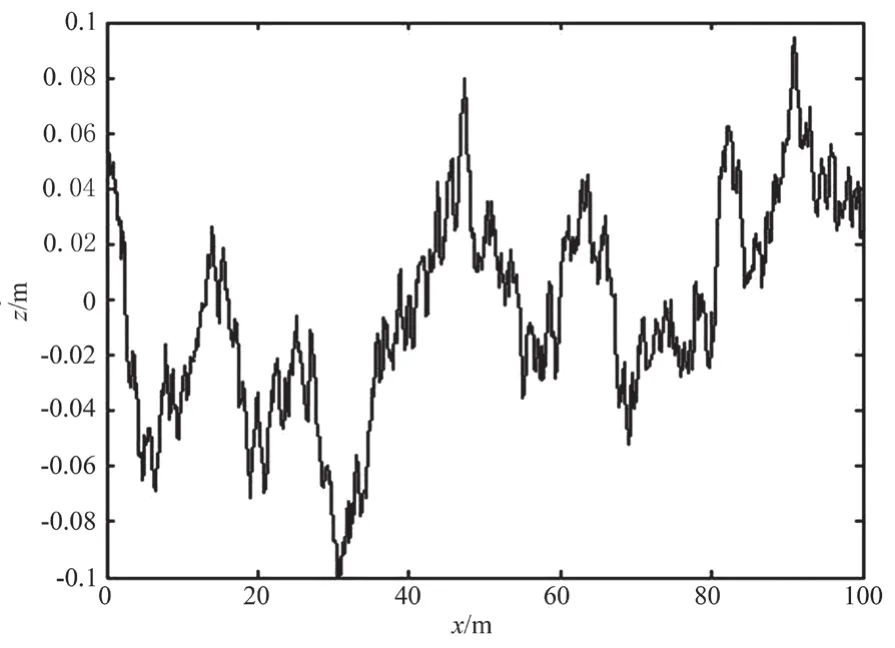
圖4 y=0.6 m處的x方向路面不平度Fig.4 The road roughness of y=0.6 m in the x direction
標準功率譜密度曲線由路面時間功率譜密度計算得出。E級路面功率譜密度曲線,由E級路面不平度信號經FFT轉換為頻率信號,再進行周期圖法功率譜估計得出[4],如圖5所示。
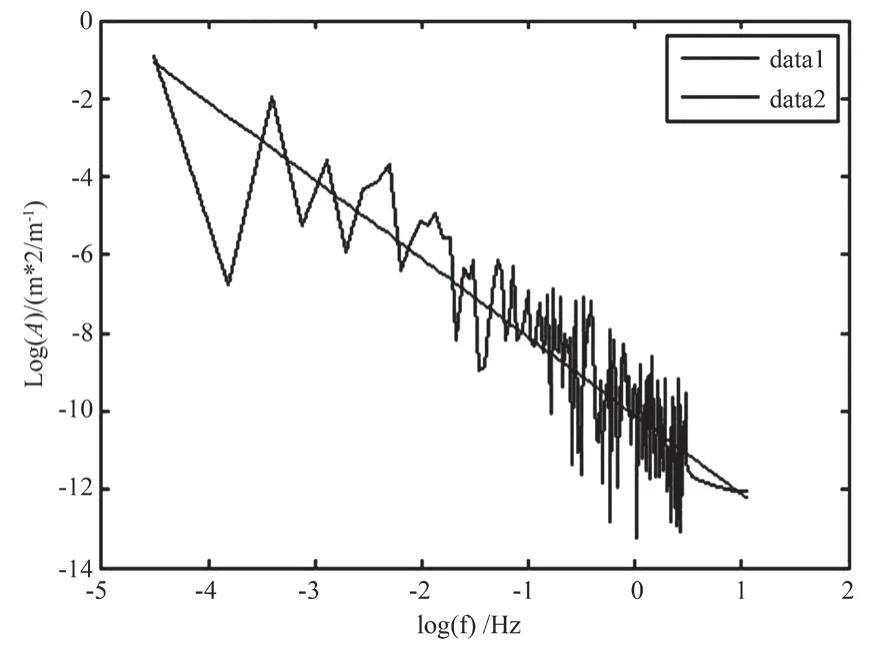
圖5 仿真E級路面不平度功率譜密度與標準譜密度對比Fig.5 The comparision of results between simulated E grade road roughness PSD and standard PSD
圖5中data2所示的曲線代表仿真產生的E級路面的功率譜密度分布曲線,data1所示的直線代表標準功率譜密度線。從圖5可以看出,兩者的走向趨勢一致,只是在幅度上有所不同。這是為了表示隨機道路路面各態歷經的特性而增加相位差隨機數發生器引起的,因此改進諧波疊加算法生成的三維道路譜模型可以較好地表示實際路面不平度且符合國家道路等級劃分標準,從而證明了路面數據可以作為模擬平臺的激勵源。利用改進的算法依次仿真出A-H八種等級路面的三維道路譜模型,并記錄三維路面譜仿真數據作為模擬平臺的激勵源。
3 道路運輸模擬平臺運動控制
醫療器械道路運輸模擬平臺模擬車輛的運輸過程是通過控制6-DOF并聯機器人運動實現的,仿真產生的三維道路譜為機器人運動提供了原始的激勵源。然而,根據機器人的運動學特性,該激勵源不能被機器人直接使用,需要轉化為機器人需要的運動數據,才能加載至機器人而控制其運動。
3.1 獲取機器人運動數據
6-DOF并聯機器人的運動是通過各驅動軸長度發生變化,從而使動平臺位姿發生改變實現的。動平臺位姿是指動平臺幾何中心相對于靜平臺的位置(x、y、z)和轉角(α,β,γ),因此首先需要求出機器人動平臺的位姿,再由位姿求出機器人各驅動軸長度,驅動軸長度的變化量對應的脈沖數即為機器人運動數據。假設某種輪距為1500 mm、軸距為2500 mm的型號汽車(假設為剛性),在上述仿真路面上以一定速度行駛,由道路譜計算出車輛在仿真三維道路上的狀態角,這樣就得到了車輛幾何中心在道路行駛中垂直方向的位移(路面不平度)及車身轉角。根據6-DOF并聯機器人的位置反解算法[5],求出動平臺的位姿,得到機器人所需的運動數據。機器人數據獲取過程如圖6所示。
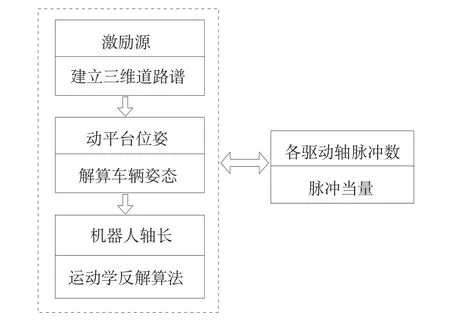
圖6 機器人數據獲取過程Fig.6 The acquisition process of robotic data
3.2 機器人運動控制
機器人運動控制由自行開發的醫療器械道路運輸模擬軟件完成。運動控制過程如圖7所示。
(1)運行控制軟件,初始化機器人各驅動軸和運動控制卡;(2)選定需要模擬的等級路面與車速并對車速進行判斷;(3)控制卡接收運動數據后以脈沖方式發送給各驅動軸的伺服電機;(4)監視一號軸和三號軸的寄存器值是否為3,若為3,則繼續監視寄存器狀態,否則存儲該時刻各驅動軸脈沖數,用于計算各驅動軸的運動速度;(5)監視各驅動軸運動速度,防止運動速度大于2 m/s;(6)使用絕對位置S形直線插補方法,對各驅動軸進行運動控制;(7)機器人各驅動軸完成一組運動數據,取下一組數據繼續運動;(8)模擬運動結束后,機器人進行復位操作。
4 結論
作為一個高效、可控的醫療器械道路運輸模擬平臺,激勵源和運動控制是其中兩個關鍵部分。采用改進諧波疊加算法建立的三維道路譜,可以準確地表示隨機路面的各態歷經的特性以及車輛運動的動態特性。保證了加載至6-DOF并聯機器人的數據具有較高的準確性,通過絕對模式的S形直線插補方法控制并聯機器人,并實時監控機器人的運動速度和寄存器狀態,保證了機器人完成運動數據的精確性,從而使醫療器械道路運輸模擬平臺能夠高效準確地模擬車輛在不同車速、各種等級路面上的運動情況。該平臺與國內現有的振動試驗機相比,具有模擬真實、可控性好、針對性強和運動多樣化等優勢,而且比國外的道路模擬試驗機價格低廉。
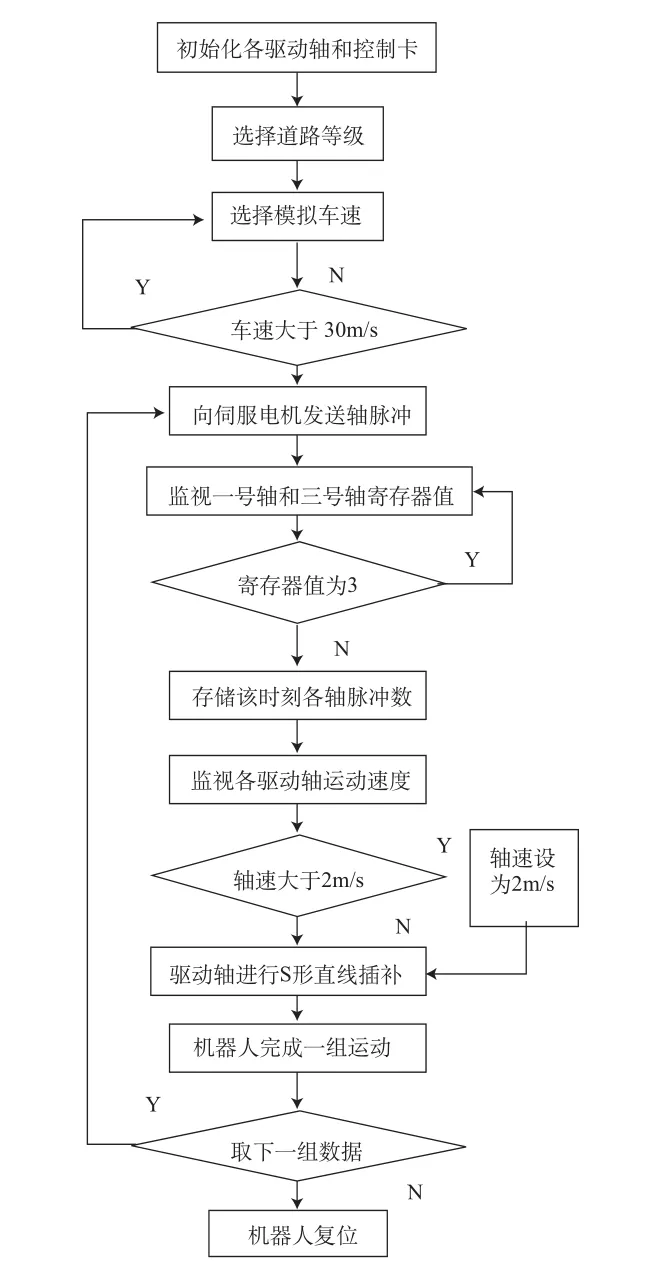
圖7 機器人運動控制流程Fig.7 The controlling process of robotic motion
[1]劉建強,何景華.交通運輸業與國民經濟發展的實證研究[J].交通運輸系統工程信息,2002,2(l): 82-86.
[2]GB/T 7031-2005,機械振動道路路面譜測量數據報告[S].北京:中國標準出版社,2005
[3]徐占,過學迅,汪斌.標準路面譜重構及軟件實現[J].汽車科技,2009,3: 23-26.
[4]黃志宇,劉寶華,陳高平,等.隨機信號的功率譜估計及MATALAB的實現[J].現代電子技術,2002,143(3): 21-23.
[5]黃真,孔令富,方躍法.并聯機器人機構學理論及控制[M]北京:機械工業出版社.1997
[6]盧文祥,杜潤生.機械工程測試[M].第二版.武漢: 華中科技大學出版社,1999
[7]Mahdi Yousefzadeh,Shahram Azadi.Abbas Soltani.Road profile estimation using neural network algorithm[J].J Mech Sci Technol 2010,24 (3): 743-754.
[8]G Jacoby.State of the art and future of road simulation development[J].ATA Ingenerate auto motor istica,1988,41(12):37-41.
