自適應差分進化算法在PMSM電機控制器中的應用
2013-12-03 01:23:36胡玉純畢浩洋
鄭州大學學報(工學版) 2013年6期
王 杰 ,胡玉純,畢浩洋
(鄭州大學 電 氣工程學院,河南 鄭 州450001)
0 引言
永磁同步電機(Permanent Magnet Sync hronousMotor,PMSM)具有體積小、效率高、功率因數高、起動轉矩大、溫升低等特點,能夠實現裝置的轉速和位置的精確控制,廣泛應用于機械加工、電力拖動等裝置[1].
由于PMSM電機的非線性、多耦合等特性以及工作環境的變化,常規的矢量控制方式不能夠保證轉速調節的快速性和準確性.為了改善PMSM轉速控制系統的動態性能,許多智能控制算法相繼被引入到PMSM電機轉速控制領域[2].這些算法在一定程度上改善了系統的性能,但各自都存在著一定的局限性,神經網絡隱含層數以及各層節點數沒有系統的確定方法,遺傳算法收斂速度慢且操作復雜[3].差分進化(Differential E-volution,DE)算法收斂速度快、進化參數少、結構簡單且泛化能力強,在各個領域獲得廣泛應用[4].但標準差分進化中難以確定合適的變異率,變異率過大會導致搜索速度慢,不易收斂到最優解,變異率過小則容易出現“早熟”現象[5].因此筆者將自適應差分進化算法(Self-Adaptive Differential Evolution,SADE)應用到PMSM電機控制當中,改善了PMSM轉速調節的動態性能和靜態性能,并通過Matlab/simulink仿真驗證了方案的可行性.
1 永磁同步電機數學模型
永磁同步電機結構復雜并且高度非線性.采用PMSM的d-q軸數學模型[6],不僅能夠同時分析PMSM的穩態特性和暫態特性,而且能夠簡化分析過程[7].通過如下假設:忽略空間諧波,磁路不飽和,不計鐵心損耗,忽略渦流和磁滯損耗,可以得到PMSM的d-q軸數學模型.此時,我們可得PMSM的d-q軸磁鏈方程為

式中:Ψr為轉子在定子上的磁鏈耦合;Ld,Lq分別為PMSM的d軸和q軸電感;id為定子電流矢量的d軸分量;iq為定子電流矢量的q軸分量.
在PMSM的d-q軸坐標系下,定子電壓方程可以表示為

式中:ud為定子電壓矢量us的d軸分量;uq為定子電壓矢量us的q軸分量;ω為轉子的角頻率;p為微分算子.
PMSM電機的電磁轉矩方程為

式中:np為電機極對數;(Ld-Lq)idiq為磁阻轉矩.
當PMSM運行在恒轉矩區域時,通過將定子電流矢量全部控制到交軸上(iq=is),可以使定子電流全部用于產生電磁轉矩.此時,可得PMSM電機的磁鏈方程:

電壓方程:

電磁轉矩方程:

由于永磁同步電機的轉子為永磁體,即Ψr為固定值,從上述公式可以看出:電磁轉矩為定子電流的npΨr倍.因此,調節定子電流就能夠準確地輸出期望的電磁轉矩,從而獲得優良的調速特性.
2 自適應差分進化算法
標準差分進化是一種類似于遺傳算法但性能更優越的算法,它采用實數編碼,通過貪婪準則不斷選擇群內個體[8];它在變異步驟上采用差分策略,算法的優化速度和全局優化能力有了較大提高.但標準差分進化算法的進化參數為固定值,不能隨著優化過程的發展而自適應調整.為提高算法的快速性和魯棒性,筆者提出了一種進化參數能夠動態調整的自適應差分進化算法.
2.1 初始化
自適應差分進化算法開始前需要將種群初始化為可行域內的隨機量NP為種群規模.種群中每個個體表示為:xi,G(i=1,2,…,Np),其中:i為個體在群體中的位置;G為進化的代數.在尋找最優解之前,要對種群進行初始化.即從參數變量的界限中隨機獲取一個值:

2.2 變異

式中:r1,r2,r3∈{1,2,…,Np}兩兩之間不相等并且不等于i為第t代基向量)為第t代的差分向量;K∈[0,1]為變異因子.
2.3 交叉
為增加種群的多樣性,通過對xti和變異得到的新個體 vti+1進行交叉運算,得到實驗個體,即

式中:rand(j)為取值范圍是[0,1]的均勻隨機數;CR為取值在[0,1]范圍內的交叉因子;rnbr(i)為一個隨機量,且 rnbr(i)∈{1,2,…,D}.
2.4 選擇

2.5 進化參數的自適應調整
在標準差分算法進化尋優過程當中,種群規模NP、變異因子K以及交叉因子CR共3個參數都為固定值,參數值選擇的合適與否對計算的過程和結果有很大影響[9].其中,變異因子K的最優值難以確定,如果K的值選取過大,搜索步長太大,容易形成振蕩,不易收斂到全局最優解;如果K的值選取過小,搜索步長太小,搜索過程緩慢并且易于收斂到局部最優解[10].仿真實驗表明,采用能根據搜索階段作自適應調整的變異因子K,即在開始階段選取較大的K值,在搜索后期選取較小的K值,既能保證算法的快速性,又能避免陷入局部最優解.自適應的變異因子如下:
式中:Gmax為最大進化次數;G為當前進化次數;參數 a取值范圍為[0.2,0.6].
3 自適應差分進化PID控制器
3.1 控制系統結構
SADE-PID控制系統的結構如圖1所示.整個系統采用閉環控制的方式連接,將采樣得到的參數u(k)、e(k)、n(k)作為自適應差分進化算法的輸入,輸出為經過優化的PID參數.PID控制器輸出SVPWM的參考電壓,通過SVPWM調制方法產生驅動電機運轉的電壓,最終實現PMSM電機轉速的高效控制.
3.2 適應度函數選取
準確的適應度函數是自適應差分進化算法應用于控制系統的基礎,它是進化過程中個體優劣程度的評價標準,保證了種群不斷向最優的方向進化,最終實現系統動態特性和靜態特性的最優化.為綜合全面地評價控制器的動態性能指標,應建立包含多個系統參數的目標函數.因此,可將系統的各個參數加權后列入目標函數表達式當中.最終選取的目標函數為

式中:e(t)為轉速誤差;tu為上升時間;u(t)為控制器輸出;ω1、ω2、ω3為權值.
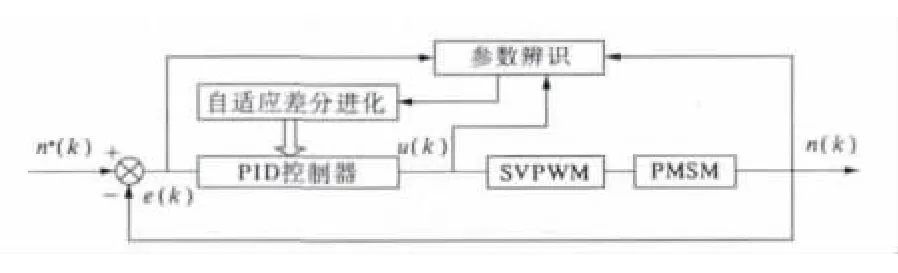
圖1 SADE-PID控制系統結構圖Fig.1 SADE-PID control system diagram
良好的控制效果應當是超調量盡量小且調節時間盡量短,即適應度函數與目標函數J成反比,故在實際應用中選擇適應度函數為

式中:10-10用于防止分母為零.
3.3 SADE-PID參數優化步驟
(1)參數選擇.選擇自適應差分進化算法需要確定的各個參數,種群規模NP、變異因子K、交叉因子CR、最大進化次數Gmax、參數a和算法終止條件.
(2)根據種群規模NP和最大進化次數Gmax,隨機初始化種群.
(3)評估隨機初始化的種群,得到種群內部各個個體的適應度函數值.
(4)初次判斷是否符合終止條件.若符合,則算法結束,將此時的最優解輸出;若不符合,進行第(5)步.
(5)按照相應的變異因子和交叉因子,執行變異和交叉操作,產生試驗向量.
(6)比較目標向量xi,G和試驗向量,按照貪婪準則進行選擇,產生新種群.
(7)重新評價新種群.若達到最大進化次數Gmax或適應度函數值小于閥值λ=10-6,則終止進化;否則,進化代數加1并轉到第(4)步繼續運行.
4 仿真研究
利用Matlab/simulink構建系統模型,驗證控制算法的性能.根據需要選取PMSM電機,其參數如表1所示.
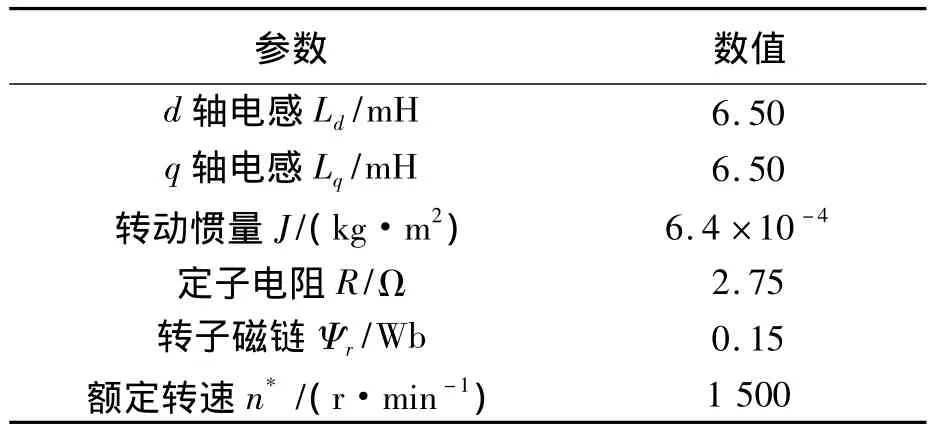
表1 PMSM電機參數Tab.1 PMSMmotor parameters
根據永磁同步電機的結構特性,在Matlab/simulink中建立系統的控制模型,設置自適應差分進化的相關參數,然后進行仿真分析.設定種群規模為NP=30,種群中每個成員含有3個參數變量:KP、KI和 KD.取變異因子 K=0.08,交叉因子CR=0.90,參數 a=0.35.借鑒 Ziegler-Nichols整定方法得到的結果,將種群中各成員參數變量的邊界條件設定為:Kp∈[0 20]、KI∈[0 1]和KD∈[0 1];適應度函數中的 ω1、ω2、ω3取隨機值.
設置適當的參數后,進行仿真分析,得到PMSM在不同情況下的響應曲線.經過自適應DE算法優化PID參數的PMSM轉速響應曲線與標準DE優化PID參數轉速響應曲線的對比如圖2所示;兩種控制方式下對轉矩擾動的響應曲線對比如圖3所示.
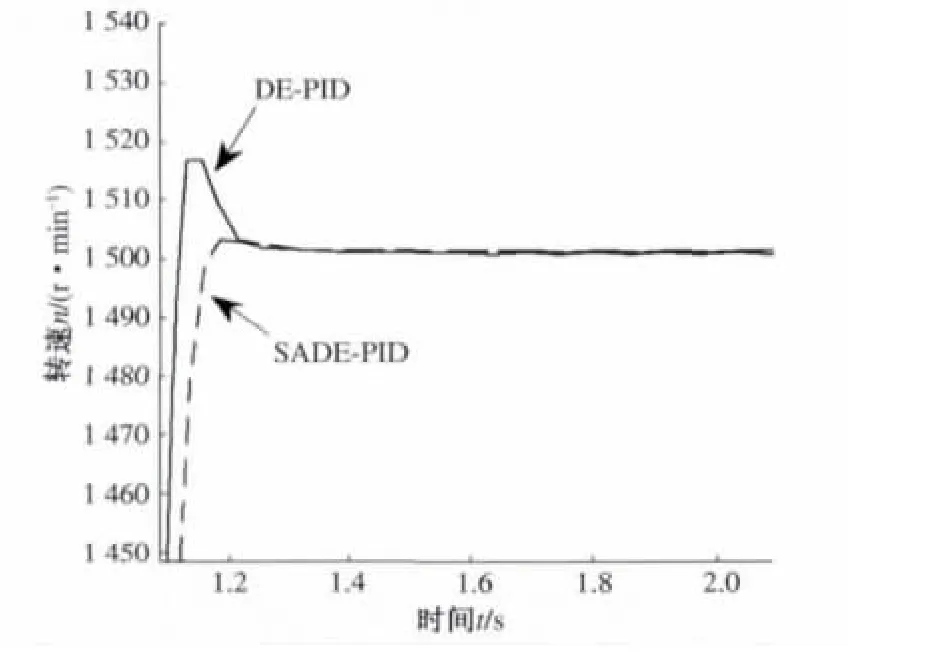
圖2 階躍輸入的轉速響應Fig.2 Speed response to a step input
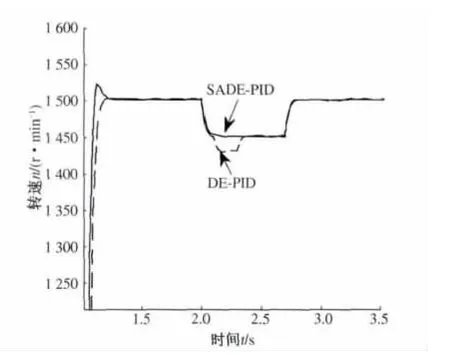
圖3 轉矩擾動時的轉速響應Fig.3 The torque disturbances speed response
通過對比分析圖2和圖3可知:PMSM轉速控制系統的PID參數經過自適應差分進化算法優化以后,不僅超調量大幅減小,響應時間明顯縮短,控制精度提高,而且能夠實現轉速的平穩控制,抗干擾能力也大大增強.系統的動態特性和靜態特性與標準差分進化算法PID整定方法相比,都有顯著的改善,體現了利用自適應差分進化算法優化PMSM轉速控制系統參數的可行性和有效性.
5 結束語
提出了一種利用自適應差分進化算法優化PID參數的永磁同步電機轉速控制系統,并且詳細描述了算法的實現步驟.仿真實驗表明,由于自適應差分進化算法的快速收斂性和強大的全局尋優能力,PMSM電機轉速控制系統的動態特性和靜態特性都得到了顯著改善.這體現了將自適應差分進化算法引入到PMSM轉速控制領域的實際意義.
[1] 王秀和.永磁電機[M].北京:中國電力出版社,2011:5-8.
[2] 楊華芬,楊有,尚晉.一種改進的進化神經網絡優化設計方法[J].鄭州大學學報:工學版,2010,31(5):116-120.
[3] DAVID B F.Evolutionary computation:Toward a new philosophy of machine intelligence[M].NewYork:IEEE Press,2000:185-200.
[4] 雷小宇,樓樸根.基于差分進化的多機器人路徑規劃[J]. 計算機仿真,2011,28(1):10-13.
[5] 王艷宜.改進差分進化算法及其應用[J].機械設計與研究,2010,26(5):13-16.
[6] 張永春.高性能PMSM矢量控制系統設計與實現[J].制造業自動化,2012,34(11):122-125.
[7] ZHANG Ying-cai,ZHU Jia-gang.Direct torque control of permanent magnet synchronous motor with reduced torque ripple and commutation frequency[J].IEEE Transactions on Power Electronics,2011,26(1):235-248.
[8] STORN R,PRICE K.Differential evolution-A simple and efficientadaptive scheme for global optimization over continuous spaces[R].Berkeley:University of California,2006.
[9] DASS,SUGANTHAN P N.Differential evolution:A survey of the state-of-art[J].IEEE Transactions on Evolutionary Computation,2011,15(1):4-31.
[10]熊偉麗,許文強,徐保國.基于差分進化算法的Wiener模型辨識[J].控制工程,2012,19(5):900-904.
