臥式加工中心換刀機械手的動態特性分析
2013-11-26 03:11:36羅生梅牛朝陽
機械制造 2013年3期
□ 羅生梅 □ 牛朝陽
1.蘭州理工大學 數字制造技術與應用省部共建教育部重點實驗室 蘭州 730050
2.蘭州理工大學 機電工程學院 蘭州 730050
加工中心自動換刀裝置 (Automatic Tool Changer,ATC)主要由機械手、刀庫等組成,其作用是將主軸上的工作刀具與刀庫中的待用刀具進行交換。對于加工中心的機械手而言,應具有換刀時間短、工作平穩、定位準確的特點。
加工中心自動換刀裝置換刀的可靠性,也是ATC系統先進與否的一個重要標志,隨著我國制造業的飛速發展,與之息息相關的精密制造裝備也向著高速度、高精度、高效能、高柔性、自動化的方向發展,在保證使其具有良好性能的同時,還要有很高的可靠性。換刀時,執行的動作多、速度快、對定位準確性要求高,尤其在復雜零件加工過程中,需要頻繁交換刀具,這就使換刀系統的穩定性成為加工中心可靠性的薄弱環節[1]。本文以QYJ-21型加工中心自動換刀機械手為研究對象,建立換刀機械手組合體的動力學模型,分析換刀裝置的動態性能,找出其薄弱環節。自動換刀裝置中機械手部分簡圖如圖1所示。
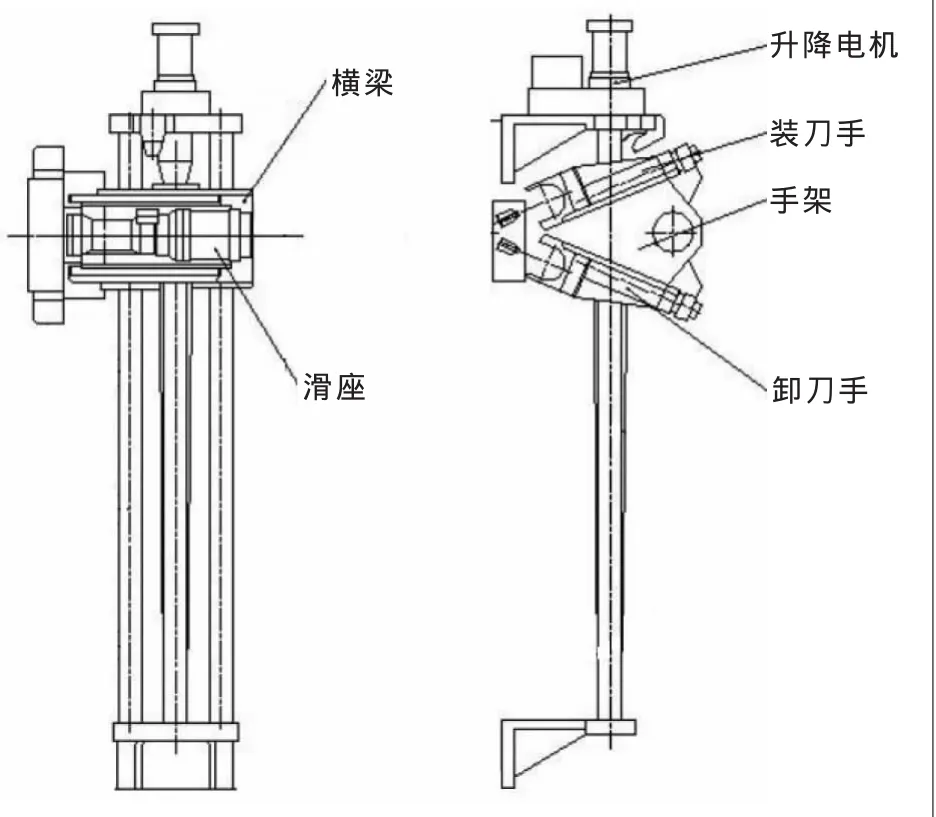
▲圖1 自動換刀裝置中機械手簡圖
1 機械手機構的動力學模型
1.1 三維實體模型建立
本文研究的加工中心換刀機械手三維模型是利用Pro/E對換刀機械手各零部件進行建模,在Pro/E中對各零部件進行裝配,并考慮換刀機械手的結構特點及各部件之間關系,建立優化的有限元分析模型。基于3D特征的裝配模型主要有以下技術:創建零部件三維實體模型;裝配路徑規劃及零部件樹狀結構劃分;位置尺寸的約束條件施加;裝配仿真以及干涉分析。
本文選用ANSYS提供的Workbench單元對實體進行網格劃分。劃分網格是建立有限元模型的一個重要環節,它要求考慮的問題較多,所需的工作量大,劃分的網格形式對計算精度和計算規模將產生直接影響[2]。
1.2 約束處理
約束條件也稱為邊界條件,只根據力的邊界條件,且線性方程是由力的平衡方程建立的,即便在連續體上的外力處于平衡狀態時剛體位移仍可能產生,所以位移沒有確定,即剛度陣為奇異陣。為此,在進行邊界條件處理時,即在求解之前,邊界約束形式是按照實際工程結構的幾何邊界條件來確定的,以消除整體剛度陣的奇異性。
1.3 有限元劃分結果比較
本文對QYJ-21加工中心機械手機構進行動態分析時,使用等參元進行劃分,在保證一定精度的條件下,盡可能減少節點數和單元數,以獲得較好的結果和分析效率[3]。對機械手結構進行動態分析,圖2為機械手手爪機構的自鎖原理圖,圖3為機械手機構三維模型。
2 機械手機構的動力分析
2.1 材料屬性
機械手選用材料為機械制造行業常用鋼種40Cr。40Cr經調質后力學的綜合性能良好且具有較好的切削加工性能及淬透性,經過碳氮共滲和高頻淬火后,滿足承受較大載荷、耐磨、沖擊不大的工況下的零件要求。彈性模量E=206 GPa,泊松比μ=0.27,密度ρ=7 850 kg/m3。對圖3進行動態分析,得出前六階的固有頻率和模態振型。
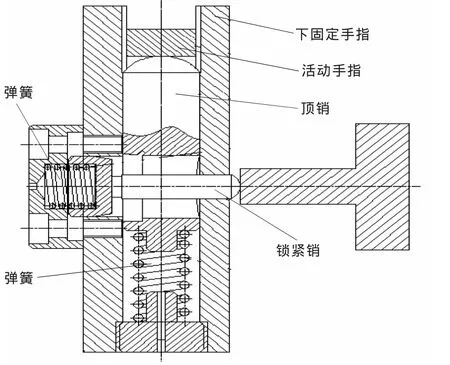
▲圖2 手爪自鎖原理圖
2.2 計算結果及分析
ANSYS的模態分析是線性分析,也是判定機械零部件結構薄弱環節的方法。ANSYS中可供選擇的模態提取方法有7種,本文采用Block Lanczos法求解,提取了前六階模態來研究各階模態下機械手的振動特性,這樣就能得到對機械手影響最大的固有頻率值[4]。
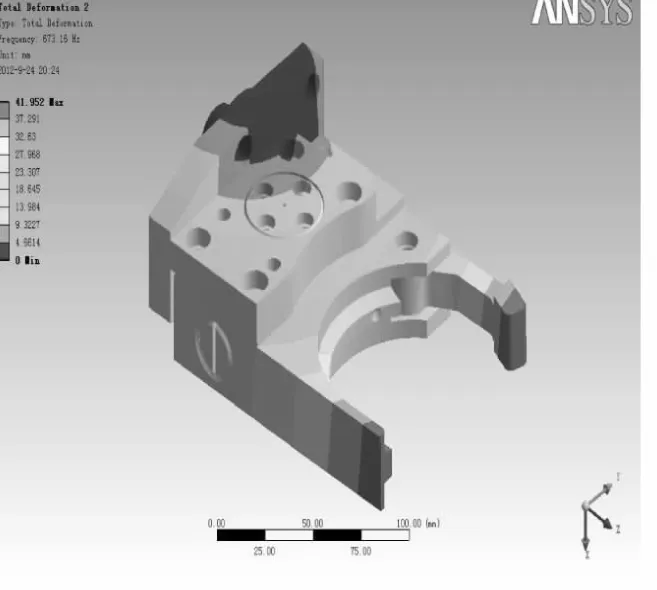
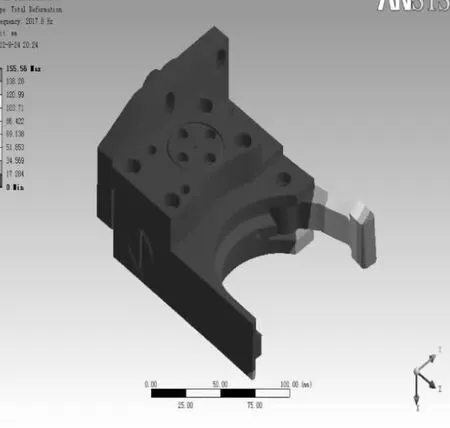
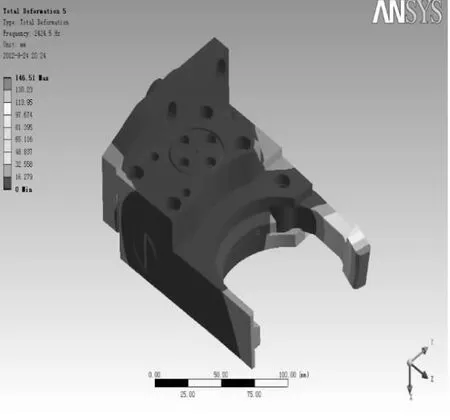
在機械手換刀過程中存在著許多個固有頻率及其相應的振型,這并不代表所有的振型都會出現不穩定現象,但是薄弱模態會出現在不穩定現象的模態中,一般低階模態是薄弱模態[5]。所以提取機械手機構的前六階模態如圖4~9所示,獲得機械手的固有頻率(如表1所示)和振型。在對模型進行網格劃分時,得到的有限元網格模型共41 531個單元、83 960個節點。
由此可以看出一階為低階模態,固有頻率最低;同時固有頻率越高,模態剛度 (如表2所示)越好,因而一階固有頻率決定結構的剛度。所以機械的工作頻率要保證低于一階固有頻率。從振型圖中可以看到,活動手指和固定手指結合部位變形較大,且從振型圖和振型數據可以分析出,固定手指的剛度較大,活動手指的剛度與固定手指比,活動手指剛度小。則兩者結合部位就會成為機械手機構在動態上的薄弱環節,因此可得出剛度弱的活動手指為本文所研究機構的薄弱環節。

表1 機械手換刀機構前六階的固有頻率
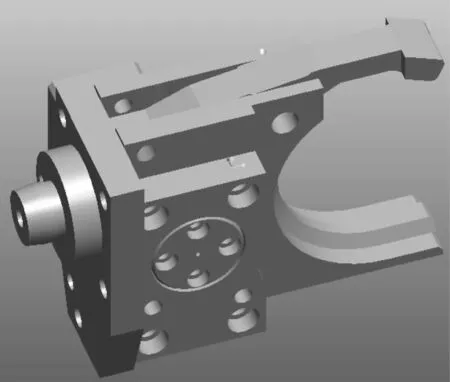
▲圖3 機械手機構三維模型

▲圖4 機械手的一階振型圖
▲圖5 機械手的二階振型圖

▲圖6 機械手的三階振型圖
▲圖7 機械手的四階振型圖
▲圖8 機械手的五階振型圖

▲圖9 機械手的六階振型圖
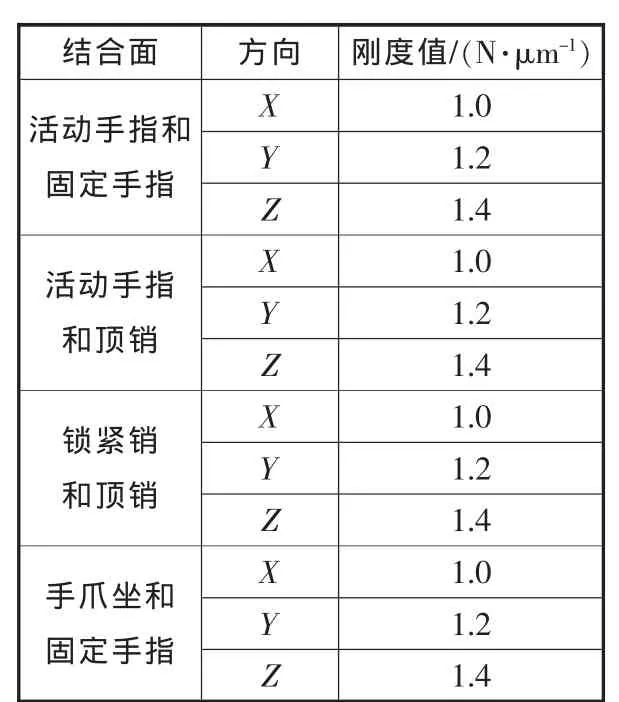
表2 各零部件結合部的連接剛度值
3 結束語
本文運用Pro/E軟件建立機械手機構的三維模型,運用ANSYS軟件中的Workbench單元對機械手機構進行動力分析,所得分析結果為QYJ-21加工中心自動換刀機械手的結構優化設計和改進奠定基礎;針對分析結果,擬采用以下兩種方案來改善機械手機構的薄弱環節。
1)通過選擇機械手機構中頂銷和螺母之間的彈簧剛度和彈力,改變活動手指的夾緊力,同時對該部分進行分析計算,尋找最佳平衡點來改變薄弱環節。
2)通過改變換刀系統的驅動形式,采用液壓和伺服電機驅動;同時對雙臂往復交叉機械手的結構進行改進設計,手指部分不再分活動手指和下固定手指,使其成為一個部件。
[1] 蘭建設,劉志剛.數控機床自動換刀裝置的故障分析與排除[J].裝備制造技術,2008(8):134.
[2] 吳巍,牛軍燕,沈春燕.基于ANSYS的自動換刀機械手的有限元分析[C].全國先進制造技術高層論壇暨第九屆制造業自動化與信息化技術研討會,武夷山,2010.
[3] 楊燦宇,周新民,楊理誠,等.TH6350臥式加工中心主軸箱系統有限元建模及動態特性分析 [J].西南林學院學報,2004,24(2):54-55
[4] 董旭,高鐵紅,靳迎波,等.基于有限元方法的并聯機床模態分析[J].北華航天工業學院學報,2008(10).
[5] 羅冠煒,陳宏規,何忠韜,模態分析在確定重載零部件的動態薄弱環節中的應用[J].機械研究與應用,1995(4):9-10.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
船海工程(2013年6期)2013-03-11 18:57:27