基于AMESim的排管機末端夾緊裝置液壓系統仿真分析*
2013-11-26 03:11:46沙永柏劉曉利占自濤
機械制造 2013年4期
關鍵詞:系統
□ 沙永柏 □ 劉曉利 □ 占自濤
吉林大學 機械科學與工程學院 長春 130025
目前,我國可采油氣資源80%儲藏在2 000 m深以內的淺層和2 000~3 500 m深的中深層,且大多數油氣田已進入鉆采開發的中后期,因此急需大量深井鉆機設備,排管機正是完成這種特殊勘鉆作業而設計的[1]。排管機能夠完成下鉆過程中鉆桿的夾緊、提放、搬運等操作,代替了人工實現鉆桿在進口與排放架間往復自動傳送和排放,從而有效地提高鉆井作業的安全性,縮短作業周期,節約作業成本[2]。排管機在正常工作時,其末端夾緊裝置起著非常重要的作用,它必須牢牢地抓緊鉆桿,達到一定的壓緊力,從而保證作業的安全性。本文針對排管機末端夾緊裝置的夾緊鉆桿工作過程,利用AMESim平臺建立該裝置的液壓系統及機械裝置原理圖,根據實際工作狀況,研究末端夾緊裝置在工作工程中的動態特性,進而為實際鉆桿抓緊作業的參數設定提供依據。
排管機的功用是實現鉆桿 (立根)在鉆臺排放架與井口中心間的自動傳送,所以又名鉆桿自動傳送系統,主要由導軌座、排管座軌、排管滑車、回轉機構、排管長銷、排管器桅桿總成、夾持滑車、排管器動臂、三角架機構及末端夾持器等組成,其結構如圖1所示。
末端夾持裝置
1 工作原理

▲圖1 鉆桿自動傳送系統結構
是鉆桿自動傳送裝置的重要組成部分,是直接執行動作任務的裝置,夾持裝置固定在夾持滑車上,主要有夾持手指、傳動連桿及驅動油缸等組成。其結構如圖2所示。
驅動油缸被固定在夾持器地板上,驅動油缸活塞桿與傳動連桿的一端通過銷軸鉸接,傳動連桿的另一端與夾持手爪相鉸接,夾持手爪可以繞著自身的固定限位桿實現擺動,驅動油缸活塞桿的伸縮運動可以實現傳動連桿的開合,從而實現夾持手爪夾緊和放松鉆桿。
2 液壓系統的設計
根據排管機末端夾持器驅動油缸的動作及壓力調節原理,其液壓回路如圖3所示。
本回路采用三位四通換向閥控制液壓缸的運動。當換向閥處于右位時,液壓缸的無桿腔進油,活塞桿伸出,當換向閥處于中位時,液壓缸保持不動;當換向閥換至左位時,液壓缸有桿腔進油,活塞缸縮回。在液壓缸油路上安裝具有自鎖功能的液壓鎖,可以實現保壓作用,防止在抓取立桿的過程中突然斷電而引起事故。
根據本設計要求,驅動液壓缸選擇雙作用單活塞桿液壓缸,如圖4所示。

▲圖2 排管機末端夾緊裝置原理簡圖

▲圖3末端夾持器的液壓回路圖

▲圖4 雙作用單活塞桿驅動油缸分析簡圖
圖中:Q1為無桿腔流量;A1為無桿腔有效面積;P為無桿腔壓力 ;Q2為有桿腔流量;A2為有桿腔有效面積;P2為有桿腔壓力;y為負載位移;N為液壓缸受的總作用力;M為等效質量。
根據液流連續性原理可得:

式中:V0為活塞在中間位置時(兩腔容積相等時)每腔的油液體積;βE為液體有效體積彈性模量。
設液壓缸兩腔有效面積比 :

對上式求導得:

根據式(1)、式(2)和式(4)可得:

對式(5)進行拉氏變換得:

液壓缸的活塞平衡方程為:

式中:Bc為活塞和負載的黏性阻尼系數;F為外界干擾力。
對式(7)進行拉氏變換:

將式(6)和式(8)代入式(9)中,整理可得液壓缸系統的傳遞函數:

3 仿真分析
AMESim是一種工程系統高級建模和仿真平臺軟件,該軟件基于功率鍵合圖的原理,能夠對機械、液壓、氣動、電磁等多學科領域的元件和系統進行建模和仿真,準確反應系統和元件相應的動態特性[3]。本文利用AMESim軟件為用戶提供元件應用庫,即機械庫、信號控制庫及液壓元件設計庫,對排管機末端夾緊裝置液壓系統及機械部分進行建模仿真,通過參數的設定,研究系統及元件的動態特性。
3.1 建立仿真模型
為模擬夾緊裝置的正常工作狀態,在AMESim軟件的草圖模式下,根據夾緊裝置的機械原理圖2及液壓原理圖3,建立如圖 5所示的排管機末端夾緊裝置的系統模型[4]。
在AMESim軟件仿真時,系統所有的模型均被參數化,各元件主要參數如下:活塞直徑為50 mm,活塞桿直徑為30 mm,行程為60 mm,傳動連桿長度為47.5 mm,夾持手爪尺寸為0.11 mm(中間節點比例4∶7)。參數設定完后,進行仿真,仿真時間設為5 s,精度設為0.001 s。
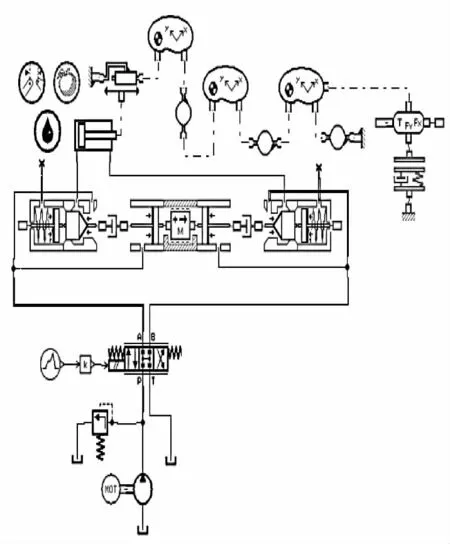
▲圖5排管機末端夾緊裝置的系統模型
3.2 仿真結果分析
仿真結束后,點擊界面的幾何構造按鈕,彈出所建模型的模型,如圖6所示,與三維模型中的模型一致。系統給定信號如圖7所示,可得到仿真結果,如圖8、9所示。圖8為夾持手爪與鉆桿的間隙距離曲線,圖9為在該信號下的夾持油缸活塞桿的運動速度(1)和末端夾持手爪的運動速度(2)。

▲圖6 AMESim中的機構模型圖

▲圖7換向閥的輸入信號

▲圖8 夾持手爪與鉆桿的距離曲線

▲圖9 油缸和夾持手爪的速度曲線
由圖可知,在該信號下,系統在1.73 s時,夾持手爪抓到鉆桿。在此過程,夾緊油缸的最大速度達到34 mm/s,夾持手爪的最大速度達到了20 mm/s,并且在接近鉆桿的時刻,夾持手爪的速度有所減緩。夾持手爪碰到鉆桿后,夾緊手抓的速度為零,并且迅速建立夾緊力F=13.6 kN(系統的壓力為25 MPa),保持到3 s時,一直保持夾緊油缸無桿腔進油。此時,系統保持不變的夾緊力,在3~4 s時,換向閥移到中位,系統處于浮動狀態,靠液壓鎖保持系統的壓力。在這段時間,夾持力緩降到5 kN。在4~5 s,夾緊油缸有桿腔進油,夾持手爪松開鉆桿。在此過程,夾緊油缸的最大速度達到44 mm/s,夾持手爪的最大速度達到34 mm/s,夾持手爪迅速地松開鉆桿,但是在退到原點時,由于慣性作用,有輕微的振動。夾持手爪在接近鉆桿的過程中,在前半段運動速度很快,在要接近鉆桿的時候,速度有所減緩,而在夾持手爪松開鉆桿的過程中,手爪的速度比夾緊鉆桿的速度要快,所用時間也較短,符合設計要求。
4 結論
1)在AMESim模式下,根據排管機末端夾持器的工作原理,利用元件庫建立夾持系統的液壓和機械圖。
2)應用AMESim軟件對夾緊裝置進行了仿真和分析,給定信號后,得到夾持系統的動態特性,為今后參數設定提供一定的依據。
[1] 任福深,王威,劉燁,等.基于AMESim的齒輪齒條鉆機動力頭起升裝置液壓系統仿真分析 [J].石油礦場機械,2012,41(5):14-17.
[2] 朱吉良.鉆桿自動傳送系統結構設計與仿真分析 [D].長春:吉林大學,2012.
[3] 劉威,孟祥金,沈從舉,等.液壓支腿機械液壓聯合仿真分析[J].農機化研究,2012(8):12-17.
[4] 張濤,曹俊,高宏力,等.基于AMESim的QY-8型汽車起重機液壓系統仿真 [J].工程技術與產業經濟,2012(4)(下):28-30.
[5] 崔學政,劉文慶,肖文生,等.海洋鉆井平臺立柱式排管機設計[J].石油礦場機械,2010,39(1):45-49.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32