GPS工程控制網在水利工程中的應用
2013-11-13 08:50:28馬峰
中州大學學報 2013年4期
關鍵詞:測量
馬 峰
(河南省水利工程二局信陽江河公司,河南信陽464000)
全球定位系統(Global Positioning SystDm -GPS):利用GPS定位衛星,在全球范圍內實時進行定位、導航的系統,稱為全球衛星定位系統,簡稱GPS。經過快速發展,目前GPS在水利工程中的應用優為廣泛。大多數水利工程都位于偏遠地區,由于地形限制,高等級測量控制點布設困難,給水利工程施工測量帶來很大困難,而且大部分水利工程都有縱向跨度很長但橫向寬度較窄的特點,用傳統的控制網布設方法會大大增加工作量,而GPS靜態定位選點靈活、不要求測站間相互通視,全天候作業、作業效率高且作業成本低,大大降低了布網費用。
一、靜態定位:
GPS靜態相對定位也稱為差分GPS,是采用載波相對定位觀測以及相位觀測的線性組合技術,減少各類誤差。主要用于測區平面控制網布設及復核。[1]
作業方法:采用兩臺(或兩臺以上)接收設備,分別安置在一條或數條基線的兩個端點,同步觀測4顆以上衛星,每時段長45 min至2 h或更多。作業布置如圖1所示。
布設GPS工程控制網主要分測前、測中和測后三個階段。在具體施測前要系統的了解測區位置及其范圍、控制網的控制面積、用途和精度等級、點位分布及點的數量、需要提交的成果內容、時限要求、投入經費、技術設計方案、測繪資料的搜集、踏勘、選點埋石與整理及儀器的校檢。
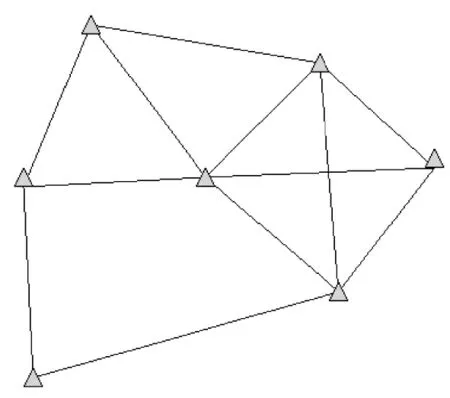
圖1
二、工程實例
南水北調中線工程鄭州2段3標位于鄭州二七區,起于鄭州賈寨,終于鄭州黃岡寺,設計樁號為SH(3)190+688.1 ~ SH(3)197+408.1,本段渠道全長6.72 km。其中多分布城中村,該區多為務工人員。氣候屬于暖溫帶大陸性氣候區,氣候溫和,四季分明,光照充足。年平均氣溫14.3℃,降雨量640毫米。夏季七月份最熱,月平均氣溫27.3℃。冬季一月份最冷,月平均氣溫為-0.2℃。冬季寒冷而干燥,春秋季節,冷暖適中。測區地形復雜,地質條件良好,交通不便,多為施工場地。
(一)測區平面控制點資料
測區有C等控制點兩個、D等控制點三個,其中點JSH2位于道路附近,有被車輛碾壓現象,其余四點標石均為不銹鋼標,標點清晰,外觀完好。點位之間植被及民房較多,互不通視。有1954年北京坐標系的成果資料,可作為渠道測區GPS控制網的平面坐標起算數據。
(二)平面坐標系統的選擇
由于使用的是1954年北京坐標系3度帶第38帶。在本測區的長度投影變形值經計算已經超過了規范規定的2.5 cm/Km,故本次測量的平面坐標系統采用經改算的1954年北京坐標系,可以滿足本次控制網布設的需求,其基準參數如表1所示。
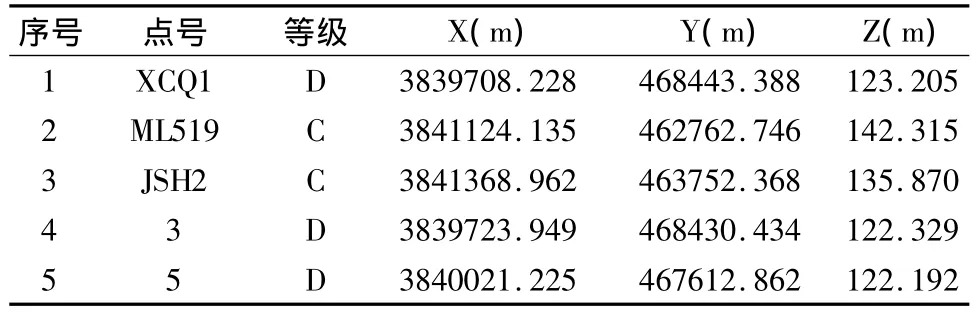
表1 已有測量控制點一覽表

表2
中央子午線經度為東經114°,邊長的高程歸化面為±0 m,坐標值采用通用值。
坐標的轉換:由WGS-84的大地坐標轉換為WGS-84的空間直角坐標,再轉換為1954年北京空間直角坐標,最后轉換為1954年北京大地坐標系見表2。整個系統采用高斯投影,采用七參數法計算兩個坐標系的坐標,七參數法由三個坐標增量,三個坐標系旋轉元素,一個尺度因子構成。七參數沒有已知,則需要知道三個點在兩個坐標系的坐標。
(三)控制網的設計方案
以D等點LXCQ1作為GPS控制網平面起算數據,以同等級擴展D等 GPS控制網,采用中點多邊形的圖形結構,用邊連式的方法進行施測。[2]
邊連式是通過一條公共邊將兩個同步圖形之間連接起來。邊連式布網有較多的重復基線和獨立環,有較好的幾何強度,平均邊長2 Km。布設方案如圖2所示。
(四)E等GPS平面控制網的布設方案
1.儀器設備:采用南方R70與南方S66接收機二臺,靜態平面精度5mm+0.5PPm,儀器均經國家授權鑒定單位檢定合格。
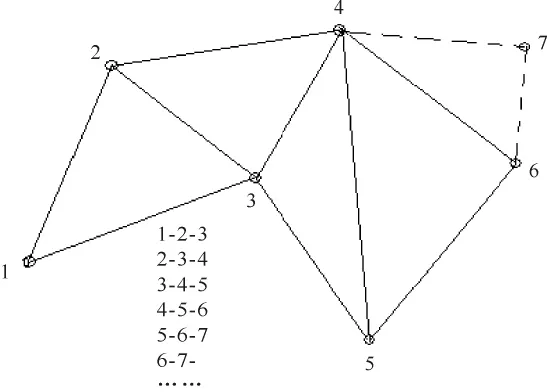
圖2
2.測量布網:利用兩臺接收機為一組進行同步觀測,以邊連式組網。觀測時段為二時段,每時段45-50min。觀測期間接收機能觀測到6顆以上有效衛星,GPS接收機觀測數據接收及處理時衛星截止高度角設置為20°。
3.外業觀測:嚴格按照《全球定位系統城市測量技術規程》進行測量作業。每日觀測結束后,及時將觀測手薄數據轉存到計算機上,同時應進行當天的基線解算。觀測手薄格式如表3所示。
GPS-E級網的主要技術要求應符合表4規定。

表3 觀測手薄格式

表4 GPS網的主要技術要求①
(五)內業處理
內業數據處理流程:
數據傳輸→手簿輸入→資料加工→資料預處理→基線解算→基線成果檢驗→重測與補測→WGS-84中經典自由網平差→網精度分析→北京54/80/地方獨立中三維無約束平差→三維約束平差→二維平差。
1.基線解算:
XCQ12975-YCQ52974觀測量L1同步時長55,歷元間隔:30高度截止角:20.0
解算設置雙差固定解為合格解。
成果表見表5。

表5
式中a(mm)為固定誤差;b(ppm)為比例誤差系數;d(km)為相鄰點間的距離。根據上述公式計算出本次GPS網相鄰基線中誤差限差為σ=5.831mm。
2.同步環、異步環檢驗:
閉合環最大節點數:3
閉合環總數:118
同步環總數:92
異步環總數:26
同步環情況見表6。

表6
環中的點:CQ12 YCQ5 XCQ1
異步環情況見表7。

表7
環中的點:SSL2 SSL4 YCQ5
由同步環及異步環檢驗可知基線相對誤差符合精度標準。
3.重復基線檢驗:
采取重復基線檢驗剔除誤差超限、不合格的基線,剔除后獨立環所含基線數仍能滿足GB-T8314-2009全球定位系統測量規范要求,不需要重測或者補測,見表8。

表8
4.WGS84-坐標系下經典自由網平差平差結果三維自由網平差單位權中誤差:0.020160 m基線及其改正見表9。

表9
平差后WGS84坐標和點位精度見表10。

表10
5.網精度分析
當前坐標系統:114
橢球長半徑:6378245.000000
橢球扁率:1/298.3
控制等級E級-2009
投影比率M0=1.000000
投影高H=0.000
原點維度B0=0.000000000N
中央子午線L0=114.000000000E
北向加N0=0.000000
東向加E0=500000.000
采用網配合法進行轉換見表11。

表11
二維平差
單位權中誤差0.004780 m
平差后坐標和點位精度見表12。

表12
此次基線解算以雙差固定解作為最終結果,雙差固定解的可靠性由固定解的單位權中誤差(Rms)做參考。由二維平差成果可知本次平差成果47個控制點的Rms最大值為1.8243,可見本次GPS靜態平面控制網成果符合精度要求。
由于GPS測得的高程精度與水準測量的成果相比精度較低,且目前并沒有規范明確規定GPS高程可代替水準測量高程,故本次測量不采用高程成果。
(六)誤差分析
1.GPS的誤差來源一般分為四類:
(1)與GPS衛星相關的誤差:主要有鐘誤差、GPS衛星星歷誤差、衛星信號發射時的天線相位中心變化以及美國采用的SA技術。
(2)與信號傳播相關誤差:主要是電離層、對流層延遲,多路徑效應。
(3)與接收機相關的誤差:主要有接收機鐘誤差、接收機天線相位中線變化以及GPS儀器硬件和軟件造成的影響。
(4)其他誤差:主要是人為操作以及計算機處理過程中產生的誤差。
本次測量過程中天氣晴朗,有微風,地形開闊少行人干擾,誤差較小。
2.針對GPS誤差來源,可以采取以下幾種方法減少誤差:
(1)已知點檢核比較法。在布設GPS靜態控制網之前,用RTK抽取較多的點進行觀測,把觀測結果與抽測點的已知坐標或用全站儀測得的抽測點坐標進行對比,發現問題則立即改正。
(2)站址的選擇上一是要選擇在地理位置良好、通視良好、交通便利且控制點易于長期保存的地點來埋及安置儀器。二是測站要視野開闊、無障礙物以減少對衛星信號傳播產生的干擾。三是要遠離大功率無線電發射源。四是選擇站點時要遠離大面積水域、建筑物等信號反射物,以避免產生多路徑效應。(3)利用未產生偏移的原有控制點標石,有利于在數據處理時選取多個已知點結算出兩個以上的平差成果進行對比以選取最佳成果。
[1]李秀海,尚國學,杜國明.GPS工程控制網坐標系的選擇和短邊GPS高程精度分析[J].測繪工程,2003(2).
[2]龐瑞炎,嚴桂強.河道GPS平面控制網網形設計[J].珠江水運,2009(4).
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00