吊重作業起重船波浪中的運動響應
2013-11-12 08:03:06汪娟娟黃衍順李懷亮謝維維
中國艦船研究 2013年3期
汪娟娟,黃衍順,李懷亮,謝維維
1 天津大學建筑工程學院,天津 300072
2 海洋石油工程股份有限公司,天津 300452
0 引 言
有關吊重作業起重船波浪中的運動響應研究,目前還沒有非常成熟的成果[1]。Todd等[2]通過對起重船起吊重物進行實驗、分析,得出起重船上吊桿起重機表現出經典的受迫球形擺的動力行為的結論,并提出起重船是典型的小阻尼系統,可以忽略系統的結構阻尼。Herry等[3]在研究起吊重物時,構建了由剛性無質量的吊索和一個吊重質點組成的起吊重物系統模型。Ren等[4]對起重船吊臂柔性對系統動力學特性的影響進行了分析,研究中使用的模型為二維平面鐘擺模型。船舶高頻運動會對起重機產生很大的附加載荷,吊繩懸掛的起吊重物在船舶搖擺的誘發下也會產生受迫振動,使起重作業的安全受到威脅,以至無法作業[5-6]。起重船以及吊重在海洋環境作用下可能出現的大幅擺動會降低吊裝就位精度,增加吊重與其它結構碰撞的幾率,對于工程作業而言,這都是很危險的[7-8]。
本文將運用三維勢流理論建立起重船作業計算模型,對船體施行8點系泊。同時,建立吊重的質量矩陣,將吊重質點以吊繩與船體連接。考慮到實際海況,在時域計算中,引入風浪流海洋環境條件來計算起重船系泊狀態下的運動響應。并將船體重心和吊重質心作為關鍵點,通過改變系泊纜預張力以及吊繩長度、吊重重量和吊距等起吊要素來分析這些要素對吊重運動及船體運動的影響,以及改變起吊要素,吊重搖擺與船體搖擺運動的相互影響。
1 基本理論
1.1 時域中輻射問題的勢流理論
在線性化條件下,理論上可以求解滿足相應邊界條件和初始條件的非定常勢函數。通過求解輻射流場的速度勢函數,將運動浮體受到的水動力在正交直角坐標系中以分量的形式表達出來,如式(1)和式(2)所示[9]:
式中:Fj為作用于運動浮體的水動力在第 j個自由度上的分量;j為力分量的自由度( j=1,2,…,6 );k為浮體運動分量的自由度(k =1,2,…,6);μj,k為附連水質量系數,其中 j,k為定值時,表示浮體浸沒部分的幾何形狀系數與時間無關;xk(t)為浮體第 j個自由度的位移,x¨k(t)為xk(t)對時間的兩階導數;Lj,k(t-τ)為自由液面記憶效應的時延函數;ρ為流體密度;P為流場中任意點的坐標。
1.2 頻域中輻射問題的勢流理論
頻域中,分析浮體處于含有自由液面的理想流體中對流場產生的擾動的影響。當流場達到穩定狀態時,流場存在滿足拉普拉斯方程及滿足邊界條件的速度勢函數,即 ?(P,t)= ?(P)e-iωt。
根據拉普拉斯方程定解條件,可利用格林函數法求解空間輻射速度勢函數?j(P),從而將運動浮體受到的水動力在正交直角坐標系中以分量的形式表達出來,如式(3)和式(4)所示[10]:
式中:μj,k為附連水質量系數;λj,k為阻尼系數,當 j,k為定值時,阻尼函數由浮體運動頻率的函數決定。目前,附連水質量和阻尼系數既可以通過數值計算方法求得,也可以利用物理模型實驗方法得到。
1.3 水動力在時域與頻域中的轉化
在線性化條件下,通過傅立葉變換來實現水動力由頻域到時域的轉化,如式(8)所示。
2 實例計算與結果分析
2.1 起重船基本數據
計算所需的基本數據如表1所示。
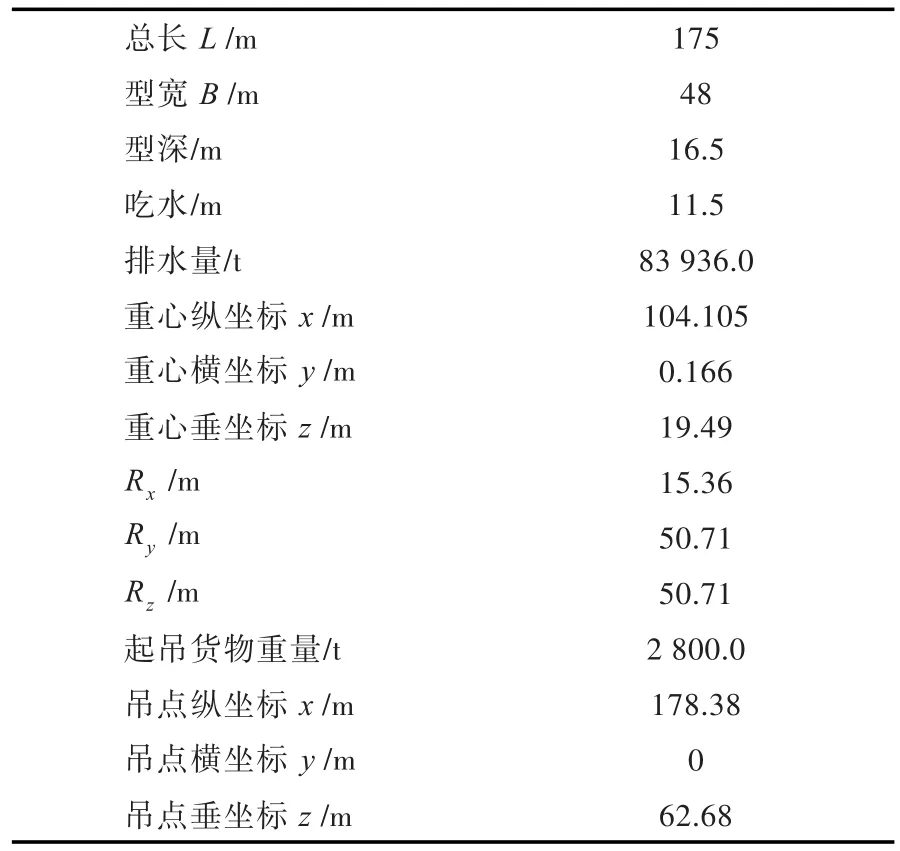
表1 計算基本參數Tab.1 Basic parameters
2.2 結果分析
實例計算中,風速取為31.8 m/s,流速取為1.08 m/s。
起重船縱向起吊,起重機布置在船尾,起重示意圖如圖1所示。
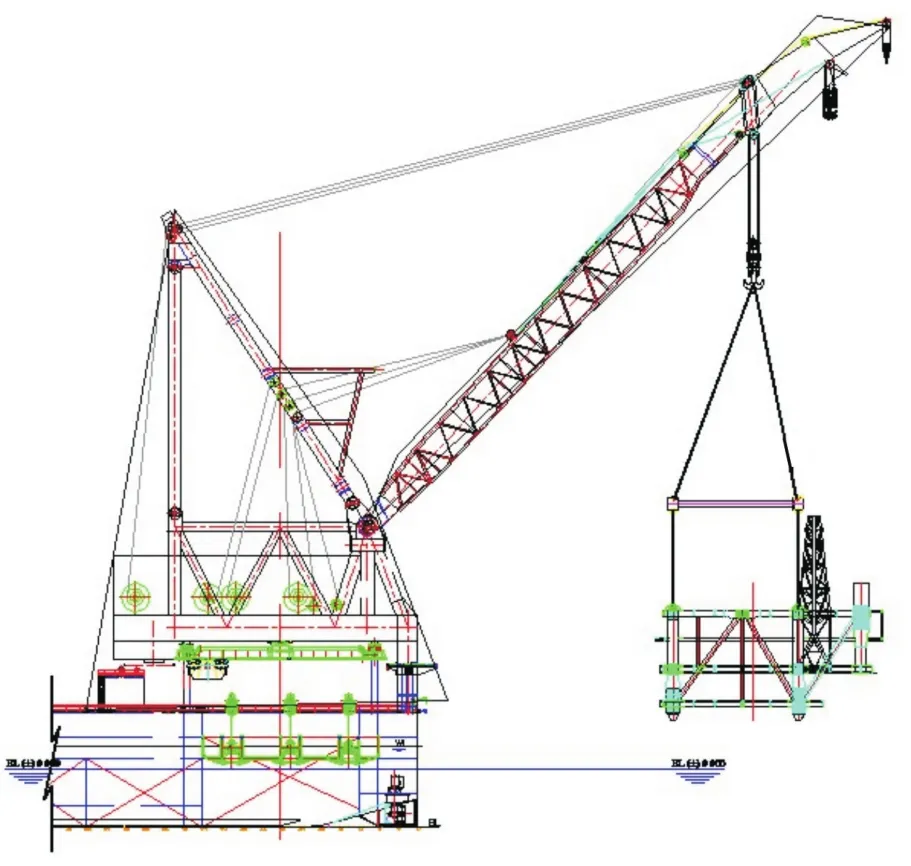
圖1 起重示意圖Fig.1 Abridged general view of hoisting
2.2.1 吊重的運動
本文以吊重重量2800.0 t,吊距41.66 m,波高1.5 m為例進行分析。由于船的橫搖運動要比縱搖運動顯著,而90°浪向下船的橫搖運動最大,故選取90°浪向時吊重的搖擺運動進行分析。
實例計算中,吊繩的剛度取足夠大,經計算對比,吊繩的軸向拉伸可忽略不計。計算的海況為規則波。
激勵的前1000 s內,吊重的搖擺角度如圖2~圖5所示。
由圖可知,吊重吊繩長度在36~66 m之間時,隨著吊重吊繩長度的增加,Rx,Ry呈遞增趨勢,且Rx的增速要快于Ry。其中,Rx為吊重繞 x方向的搖擺角度,Ry為吊重繞y方向的搖擺角度。
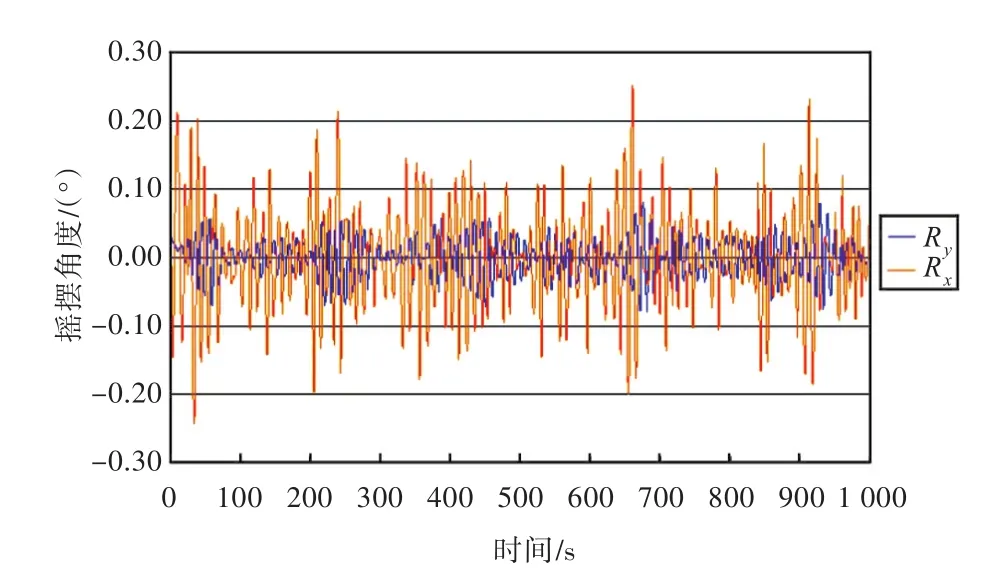
圖2 吊繩36 m長時的吊重搖擺角度曲線Fig.2 Curves of the cargo swing angle with a 36 m lifting rope
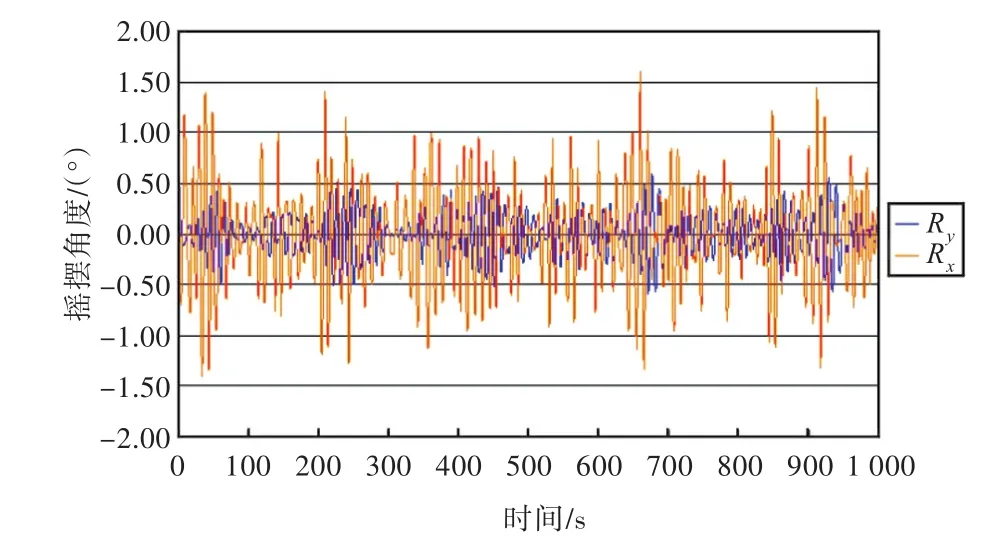
圖3 吊繩46 m長時的吊重搖擺角度曲線Fig.3 Curves of the cargo swing angle with a 46 m lifting rope
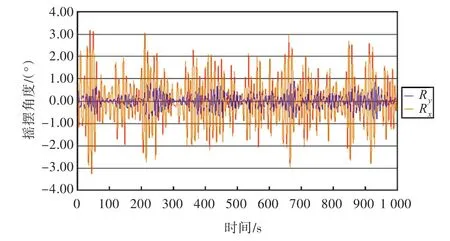
圖4 吊繩56 m長時的吊重搖擺角度曲線Fig.4 Curves of the cargo swing angle with a 56 m lifting rope
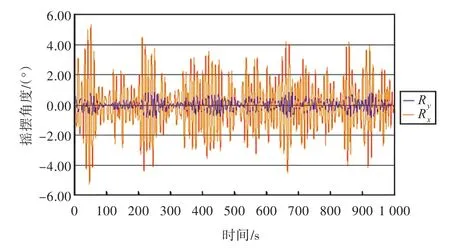
圖5 吊繩66 m長時的吊重搖擺角度曲線Fig.5 Curves of the cargo swing angle with a 66 m lifting rope
由于吊重搖擺的方向與空間上的搖擺幅值無法從數據上對應,所以只給出了xy矢量和方向搖擺的幅值,后面將對船與吊重搖擺運動的情況進行分析。吊重矢量和方向搖擺運動的幅值如圖6~圖9所示。

圖6 吊繩36 m長時吊重矢量和方向搖擺幅值Fig.6 Sway amplitude of the cargo in vector direction with a 36 m lifting rope
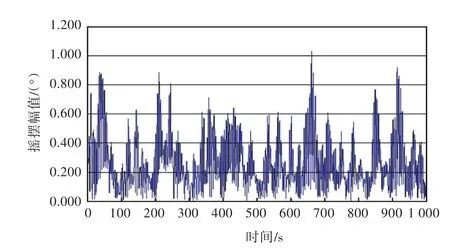
圖7 吊繩46 m長時吊重矢量和方向搖擺幅值Fig.7 Sway amplitude of the cargo in vector direction with a 46 m lifting rope

圖8 吊繩56 m長時吊重矢量和方向搖擺幅值Fig.8 Sway amplitude of the cargo in vector direction with a 56 m lifting rope

圖9 吊繩66 m長時吊重矢量和方向搖擺幅值Fig.9 Sway amplitude of the cargo in vector direction with a 66 m lifting rope
由圖中可看出,隨著吊繩長度的增加,吊重本身單擺運動的固有周期增大,吊重搖擺幅值也加大,而幅值隨時間的變化趨勢則理論上不變。
2.2.2 相同吊重、吊距,不同吊繩長度時吊重與船搖擺運動的相互影響分析
由于吊重繞x方向的搖擺運動較大,所以主要分析這個方向的運動,繞y方向的搖擺運動只列出主要數據加以參考。
RAO為船舶運動的幅值響應算子。吊繩長度為36 m時,船的RAO曲線如圖10和圖11所示。
可以看出,此時船的固有橫搖周期為13~15 s,固有縱搖周期為9~10 s。吊繩長度為46,56,66 m時,船的橫搖、縱搖RAO曲線圖幾乎沒有變化,受篇幅所限,此處不再列出。
在激勵的前1000 s內,吊重與船的橫搖運動如圖12~圖15所示。

圖10 船的橫搖RAOFig.10 Ship's rolling RAO
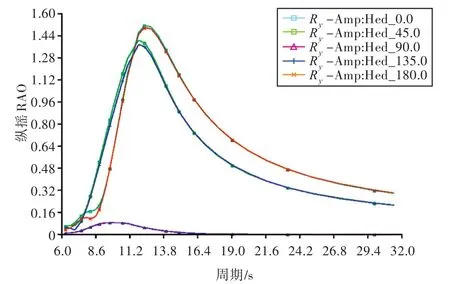
圖11 船的縱搖RAOFig.11 Ship's pitching RAO
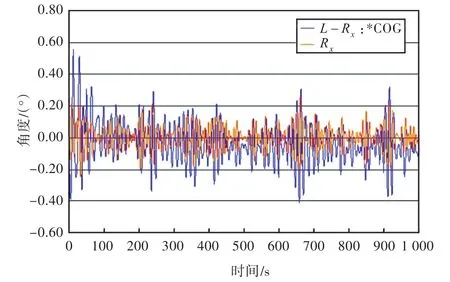
圖12 吊繩36 m長時吊重與船的橫搖運動對比Fig.12 Roll of cargo and ship with a 36 m lifting rope
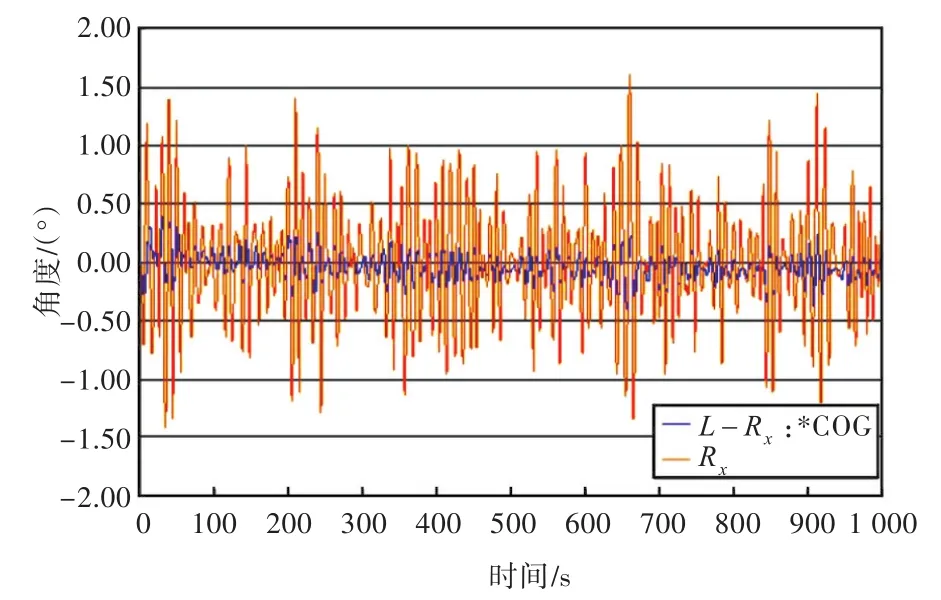
圖13 吊繩46 m長時吊重與船的橫搖運動對比Fig.13 Roll of cargo and ship with a 46 m lifting rope

圖14 吊繩56 m長時吊重與船的橫搖運動對比Fig.14 Roll of cargo and ship with a 56 m lifting rope

圖15 吊繩66 m長時吊重與船的橫搖運動對比Fig.15 Roll of cargo and ship with a 56 m lifting rope
圖中,L-Rx為船的橫搖角度。隨著吊繩長度的增加,吊重繞x方向的搖擺運動幅值也逐漸增加。當長度為56 m和66 m時,船的橫搖運動幅值不同,但相位和周期較接近。
2.2.3 相同吊繩長度、吊距,不同吊重時吊重與船搖擺運動的相互影響分析
以40 m吊距,吊繩長47.1 m,波高1.5 m為例,分析吊重分別為1000,2800,4000 t時,前1000 s內的吊重搖擺幅值。船的RAO曲線如圖16~圖21所示。

圖16 吊重1000 t時船的橫搖RAOFig.16 Ship's rolling RAO with 1000 t cargo

圖17 吊重1000 t時船的縱搖RAOFig.17 Ship's pitching RAO with 1000 t cargo

圖18 吊重2800 t時船的橫搖RAOFig.18 Ship's rolling RAO with 2800 t cargo
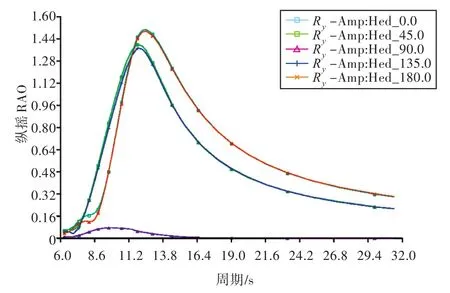
圖19 吊重2800 t時船的縱搖RAOFig.19 Ship's pitching RAO with 2800 t cargo
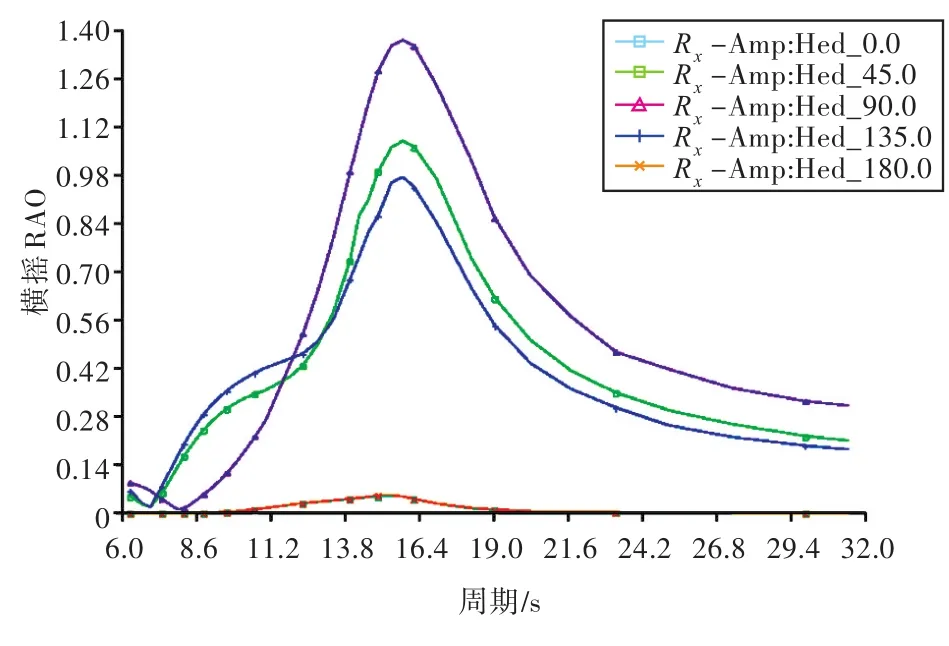
圖20 吊重4000 t時船的橫搖RAOFig.20 Ship's rolling RAO with 4000 t cargo
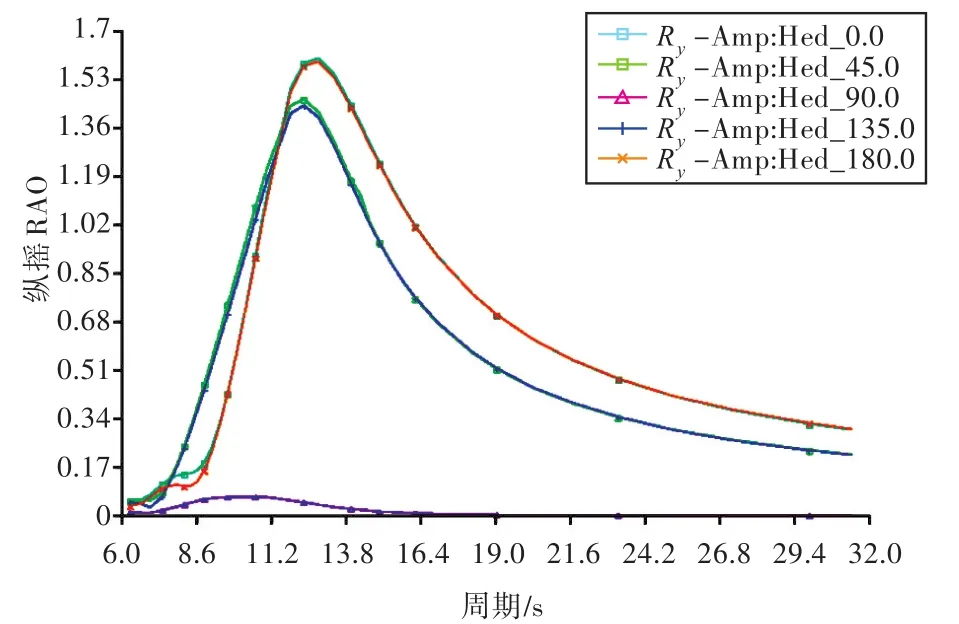
圖21 吊重4000 t時船的縱搖RAOFig.21 Ship's pitching RAO with 4000 t cargo
此時,船的固有周期如表2所示。
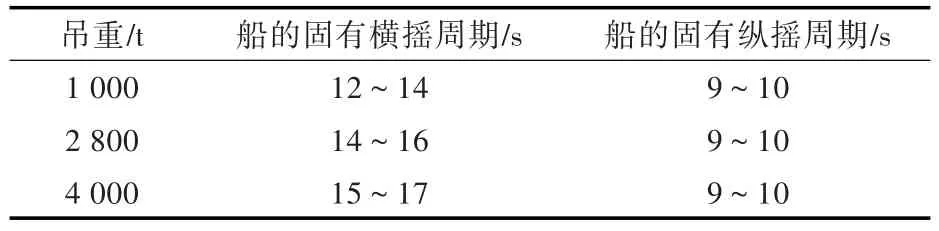
表2 船的固有周期Tab.2 Ship's natural period
在激勵的前1000 s內,吊重與船的橫搖運動如圖22~圖24所示。
不同吊重重量下,起重船與吊重橫搖運動幅值如表3所示。
由圖表可看出,隨著吊重重量的增加,船的橫搖幅值和縱搖幅值均遞減,但縱搖幅值變化不明顯;吊重繞x方向和 y方向的搖擺幅值均減小,但繞y方向的搖擺幅值變化不明顯。
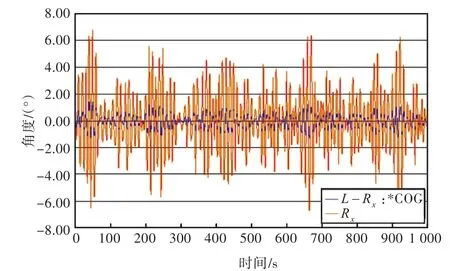
圖22 吊重1000 t時與船的橫搖運動對比Fig.22 Roll of cargo and ship with 1000 t cargo
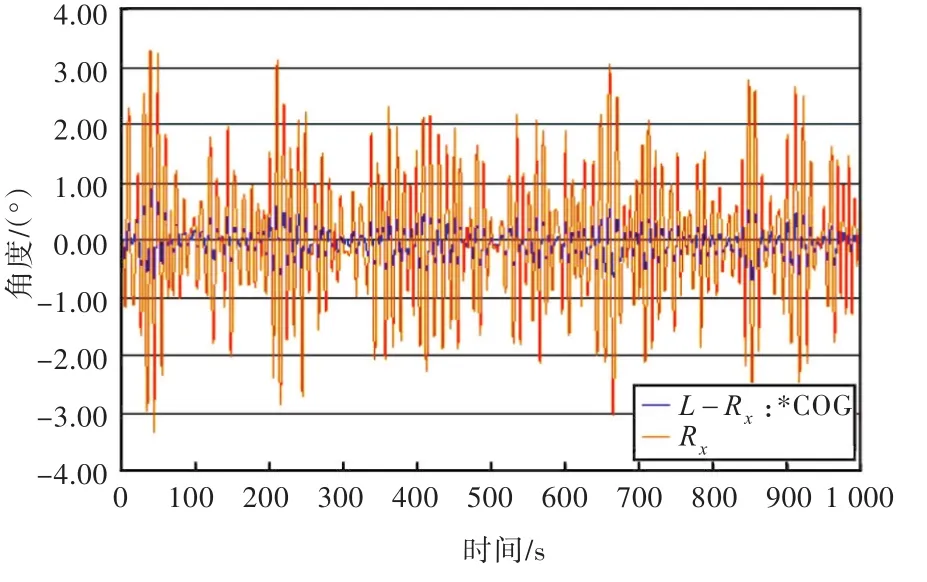
圖23 吊重2800 t時與船的橫搖運動對比Fig.23 Roll of cargo and ship with 2800 t cargo

圖24 吊重4000 t時與船的橫搖運動對比Fig.24 Roll of cargo and ship with 4000 t cargo
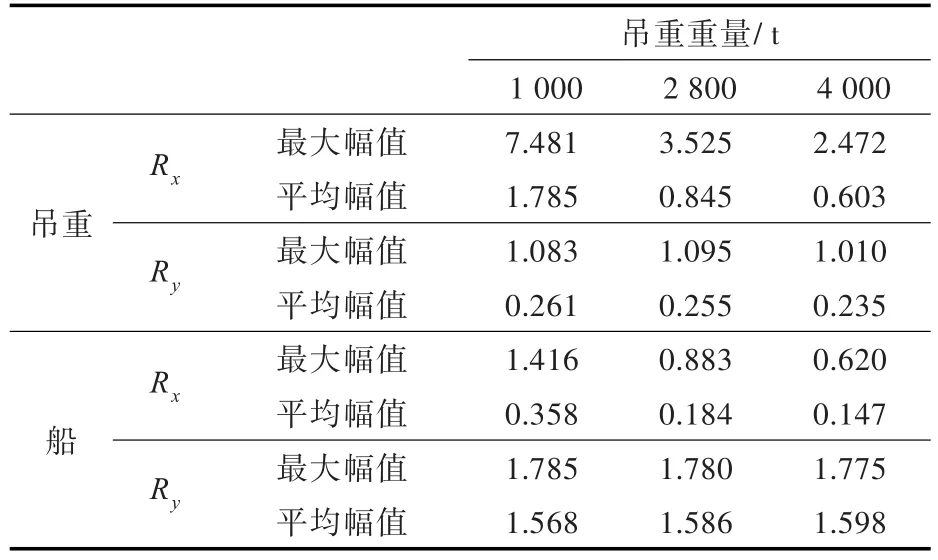
表3 不同吊重重量船與吊重橫搖運動對比Tab.3 Roll of cargo and ship with different cargos
2.2.4 相同吊繩長度、吊重,不同吊距的吊重與船搖擺運動的相互影響分析
船的RAO曲線如圖25和圖26所示。

圖25 船的橫搖RAOFig.25 Ship's rolling RAO
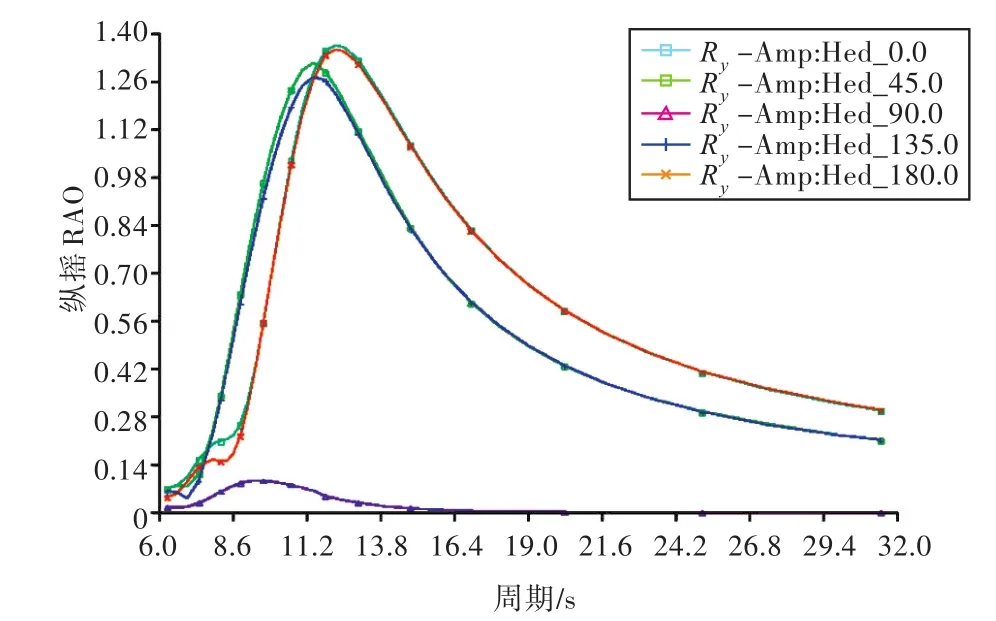
圖26 船的縱搖RAOFig.26 Ship's pitching RAO
由圖可看出,此時船的固有橫搖周期為11~13 s,固有縱搖周期為9~10 s。當吊距為50,55,60 m時,船的橫搖和縱搖RAO曲線圖幾乎沒有變化,受篇幅所限,此處不再列出。
在激勵的前1000 s內,吊重與船的橫搖運動如圖27~圖30所示。
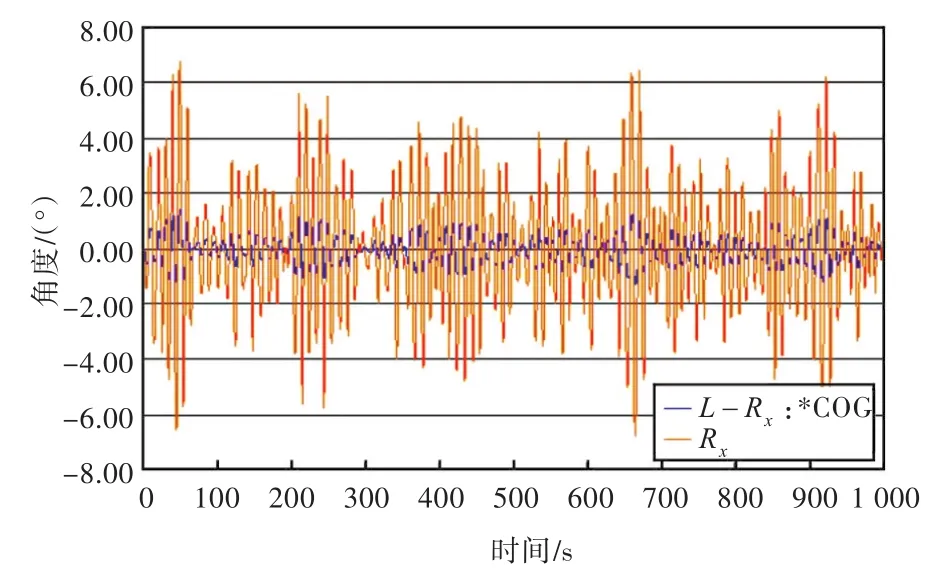
圖27 吊距45 m時吊重與船的橫搖運動對比Fig.27 Roll of cargo and ship with 45 m lifting distance
不同吊距下,起重船與吊重橫搖運動幅值如表4所示。
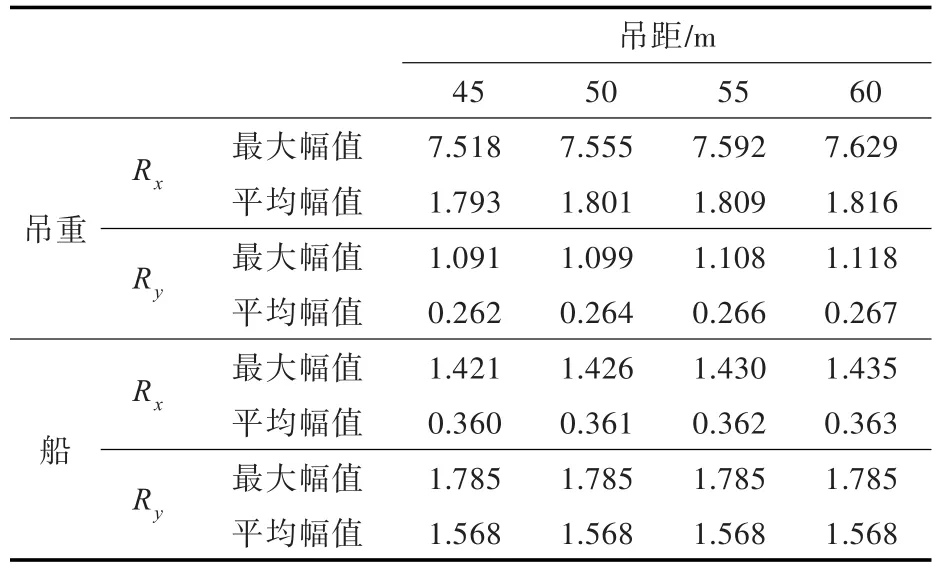
表4 不同吊距船與吊重橫搖運動對比Tab.4 Roll of cargo and ship with different lifting distances
由圖表中可看出,隨著吊距的增加,船的橫搖幅值遞增,但增量很小;而縱搖幅值則幾乎沒有變化。吊重繞x方向及 y方向的搖擺幅值均增加,但增量很小。由此可見,改變吊距對船及吊重的搖擺運動的影響不大,吊距不是個敏感因素。
在本算例中,譜峰周期約為10 s,MOSES頻域分析的結果表明,橫搖與縱搖固有周期均較接近于譜峰周期,因此易受海浪的影響。
3 結 論
本文對起重船在波浪中系泊狀態下的運動響應進行了研究。在時域計算中,引入了風浪流海洋環境條件,以船體重心和吊重質心為關鍵點,通過改變系泊纜預張力及起吊要素,分析了不同浪向、吊重吊繩長度、吊重和吊距情況下,吊重運動及船體運動的變化情況,得到如下主要結論:
1)當吊繩長度在36~66 m之間時,隨著吊繩長度的增加,Rx,Ry呈遞增趨勢,且Rx的增速要快于Ry。隨著吊繩長度的加大,吊重本身單擺運動的固有周期加大,吊重搖擺幅值也加大,而幅值隨時間的變化趨勢理論上則沒有改變。
2)隨著吊重重量的增加,船的橫搖幅值和縱搖幅值均遞減,但縱搖幅值變化不明顯;吊重繞x方向及 y方向的搖擺幅值均減小,但繞 y方向的搖擺幅值變化不明顯。
3)隨著吊距的增加,船的橫搖幅值遞增,但幅值增量很小,而縱搖幅值則幾乎沒有變化。吊重繞x方向和 y方向的搖擺幅值均增加,但增量很小。由此可見,改變吊距對船及吊重的搖擺運動影響不大,吊距不是敏感因素。
[1]CHIN C,NAYFEH A H,ABDEL-RAHMAN E.Non-linear dynamics of a boom crane[J].Journal of Vibration and Control,2001,7(2):199-220.
[2]TODD M D,VOHRA S T,LEBAN F.Dynamical measurements of ship crane load pendulation[C]//Oceans'97 MTS of IEEE Conference Proceedings,1997:1230-1236.
[3]HERRY R J,MASOUD Z N,NAYFEH A H,et al.Cargo pendulation reduction of ship-mounted cranes via boom-luff angle actuation[J].Journal of Vibration and Control,2001,7(8):1253-1264.
[4]REN H L,WANG X L,HU Y J,et al.Dynamic response analysis of moored crane-ship with a flexible booms[J].Journal of Zhejiang University Science A,2008,9(1):26-31.
[5]POSIADALA B.Effect of vibration in hoist system on dynamics of truck crane[J].Zeitschrist fur Angewandte Mathematik und Mechanik,1996,76(S5):403-404.
[6]王贛城,金長明,陳云文.吊桿式船載起重機吊繩非線性動力學建模與分析[J].噪聲與振動控制,2010(2):23-27.Wang Gancheng,Jin Changming,Chen Yunwen.Nonlinear dynamic modeling and analysis of cable in boom ship-mounted crane[J].Noise and Vibration Control,2010(2):23-27.
[7]董艷秋,韓光.起重船吊物系統在波浪中的動力響應[J].中國造船,1993(1):64-71.DONG Yanqiu,HAN Guang.Dynamic response of lifting load system of crane vessel in waves[J].Shipbuilding of China,1993(1):64-71.
[8]SARKAR A,TAYLOR R E.Dynamics of mooring cables in random seas[J].Journal of Fluids and Structures,2002,16(2):193-212.
[9]余建星,董文斌,戴愚志.RMFC模型在新型拼接式海上棧橋碼頭三維運動響應計算中的應用[J].港工技術,2006(4):1-4.YU Jianxing,DONG Wenbin,DAI Yuzhi.The application of RMFC model in the three-dimensional motion response calculation of new concatenation type maritime quay of landing stage[J].Port Engineering Technology,2006(4):1-4.
[10]唐友剛.海洋工程結構動力學[M].天津:天津大學出版社,2008:43-72.
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
計算機應用(2021年1期)2021-01-21 03:22:38
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
