汽車懸架控制系統的類型與方法研究
2013-10-25 12:52:48李靖
武漢紡織大學學報 2013年3期
李 靖
?
汽車懸架控制系統的類型與方法研究
李 靖
(武漢理工大學 汽車工程學院,湖北 武漢 430070)
分析了汽車懸架控制系統的基本類型及其特點,重點探討半主動控制和主動控制懸架系統中常用的幾種控制方法。并為今后汽車懸架控制系統的發展方向提出了些許建議。
汽車;懸架;主動控制;半主動控制
懸架是現代汽車的重要總成之一,是提高車輛平順性(乘座舒適性)和安全性(操縱穩定性)、減少動載荷引起零部件損壞的關鍵,但基于經典隔振理論的傳統懸架無法同時兼顧這三方面的要求。從上世紀70年代起,國外一些專家學者就開始研究基于控制技術的主動/半主動懸架系統。引入控制技術后的懸架是一類復雜的非線性動力系統,其研制及應用涉及機械動力學、測控技術、電子技術、流體傳動及控制、計算機技術、非線性力學等許多學科。
1 車輛懸架控制系統的類型
車輛懸架的振動控制可分為被動控制、半主動控制和主動控制三種基本類型。凡不需要輸入能量的振動控制稱為被動控制;輸入少量能量調節阻尼系數的控制稱為半主動控制;通過輸入外部能量使控制機構給于懸架系統施加一定控制力的振動控制稱為主動控制。
1.1 被動控制懸架
汽車被動控制懸架(被動懸架1/4車型簡圖如圖1)由于無需輸入外部能量和結構簡單等優點而得到廣泛應用。但隨著汽車性能的不斷完善與發展,對懸架提出更高的要求。為滿足現代汽車對懸架提出的各種性能要求,懸架的結構形式一直在不斷地更新與完善。盡管如此,傳統的被動控制依然受到許多限制,主要是難于同時改善在不同路面上高速行駛車輛的穩定性和行駛平順性。因此,被動控制的減振效果較差。
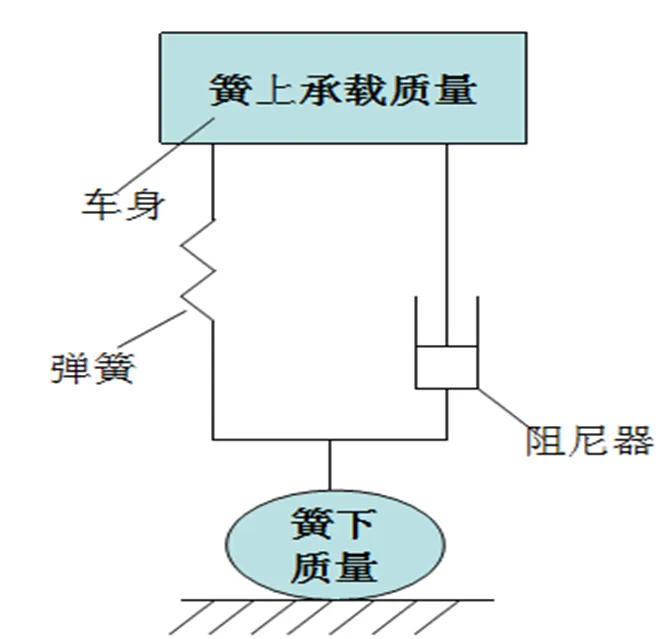
圖1 被動懸架
1.2 半主動控制懸架
汽車半主動懸架(半主動懸架1/4車型簡圖如圖2)由可變特性的彈簧和減振器組成。其基本工作原理是根據簧上質量相對車輪的速度響應和加速度響應等反饋信號,按照一定的控制規律調節可調彈簧的剛度或可調減振器的阻尼力。半主動懸架在產生力的方面近似于被動懸架,但是半主動懸架的阻尼系數或剛度系數是可變的。通常以改變減振器的阻尼力為主,將阻尼分為兩和三級,由人工選擇或根據傳感器信號自動確定阻尼級。其研究工作始于1974年美國加州大學戴維斯分校Karno-pp的研究工作。通過輸入少量控制能量調節減振器的液力阻尼, 改善懸架的振動特性。若以xa1表示懸掛質量(車身)速度,xa2表示非懸掛質量(車橋)速度,c表示阻尼系數,則Karno-pp控制規則的數學表達式為:
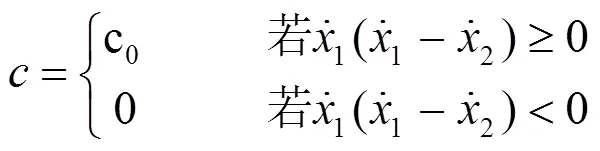
這一控制規則反映出,既要對作用在彈簧上、正比于車身絕對速度x1的振動進行抑制,也要使和彈簧變形速度(x1-x2)成比例的粘性阻尼力起作用,這是on和off的開關式控制方法。Hobslscher R,Huang Z用語言變量修改其控制規則的表達方式,則為
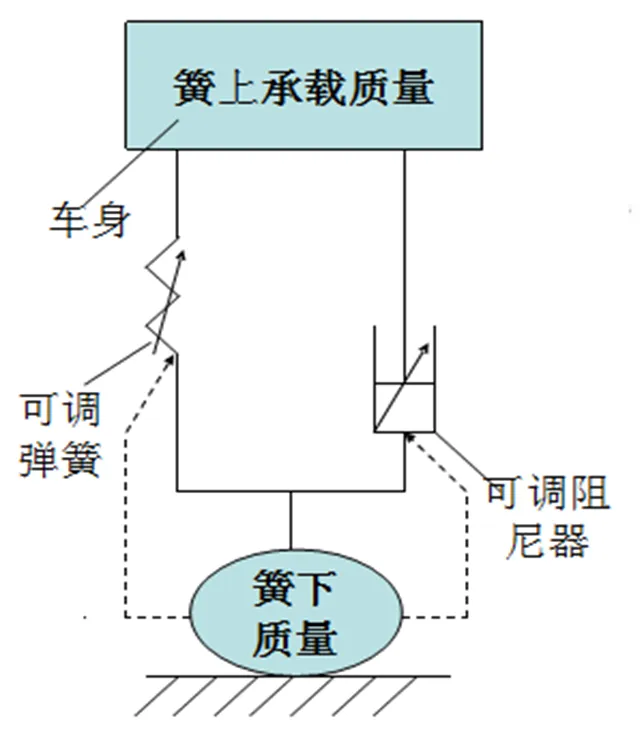
圖2 半主動懸架
1.3 主動控制懸架
汽車主動控制懸架(主動懸架1/4車型簡圖如圖3)是在被動懸架原有彈性元件和阻尼元件的基礎上加一個主動力裝置,設計者可根據預期目的, 通過這個主動力裝置和預定的控制策略來改變懸架的特性,以獲得較好的工況。主動懸架能夠根據工況變化,實時主動地調整和產生所需的懸架控制力,以抑制車身的振動,使懸架處于最優減振狀態,達到同時改善汽車行駛平順性和操縱穩定性的目的。
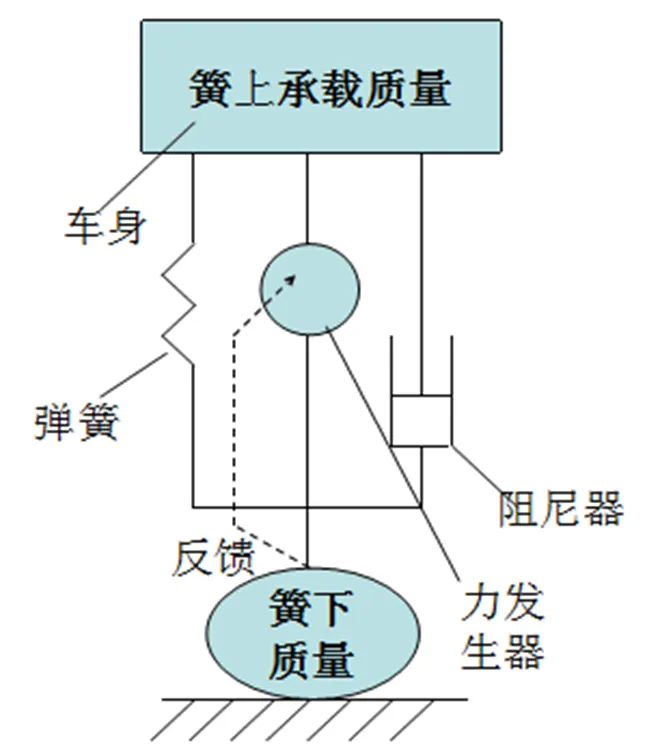
圖3 主動懸架
主動控制懸架通常包括三部分:傳感器、控制器以及執行機構,并由它們與汽車系統組成閉環控制系統。其中控制器是整個系統的信息處理和管理中心,它接受來自各個傳感器的信號,依據特定的數據處理方法和控制規律,決定并控制執行機構的動作,從而達到改變車身的運動狀態、滿足隔振減振要求的目的。
2 汽車懸架系統的控制方法
汽車懸架控制系統大多由傳感器拾取車身絕對速度、車身對車輪的相對速度、車身的加速度等信號,經計算機處理發出指令進行控制。由于車輛懸架控制系統是十分復雜的非線性動力系統,基于模型的線性反饋控制策略受到極大的限制。目前應用于車輛懸架控制系統的控制方法主要有天棚阻尼與開關阻尼控制方法,最優控制方法、自適應控制方法、基于遺傳算法和神經網絡控制的智能控制方法等控制方法。
2.1 半主動懸架常用的控制方法
70年代初,Crosby和Karnop首先提出了半主動懸架控制的概念,圖4為典型的兩自由度半主動懸架系統控制示意圖。該系統由一彈性元件與可調阻尼器構成。此可調阻尼器在其力的產生方面非常相似于被動懸架中的阻尼器,但其阻尼值是根據車身質量的加速度響應等反饋信號,按照一定的控制規律而瞬態變化的,因此其減振效果又接近于全主動懸架。由于半主動懸架中彈簧剛度為一定值,所以它的自適應性能要稍遜于全主動懸架。
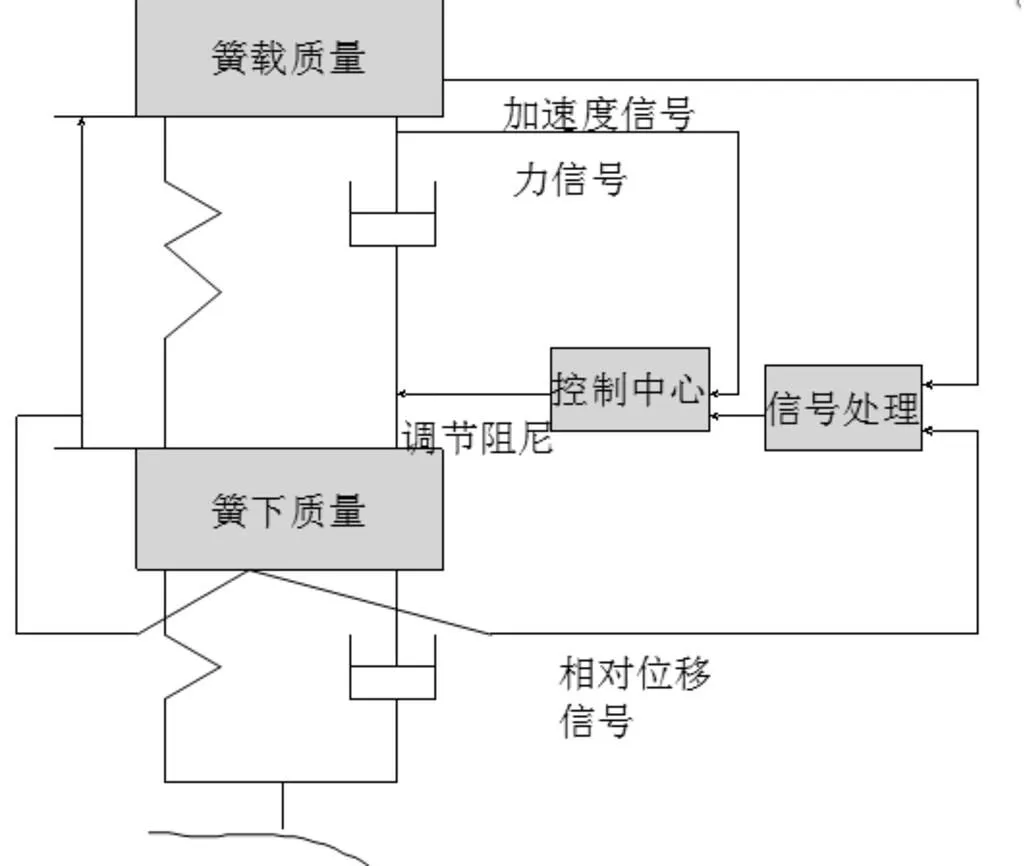
圖4 典型的半主動懸架控制示意圖
近年來,國內外學者應用控制理論在汽車半主動懸架控制系統的研究上做了大量的研究工作主要包括:最優控制、自適應控制、天棚阻尼與開關阻尼控制、模糊控制、預見控制和魯棒控制等。
2.1.1 最優控制
應用于車輛懸架控制系統的最優控制方法可以分為線性最優控制、H∞最優控制和最優預報控制等三種。線性最優控制是建立在系統較為理想模型基礎上,采用受控對象的狀態響應與控制輸入的加權二次型作為性能指標,同時保證受控結構動態穩定性條件下實現最優控制。把LQ(Linear Quadratic 線性二次型)調節器控制理論和LQG(Linear Quadratic Gaussian線性二次高斯型)控制理論應用于車輛懸架系統實現最優控制。H∞控制是設計控制器在保證閉環系統各回路穩定的條件下,使相對于噪聲干擾的輸出取極小的一種最優控制法。為了模擬由于車身質量、輪胎剛度、減振器阻尼系數以及車輛結構高頻柔度模態等變化不確定的誤差,應用H∞控制方法可實現車輛懸架振動控制具有較強的魯棒性。最優預報控制是利用車輛前輪的擾動信息預估路面的干擾輸入,預報控制的策略就是把所測量的狀態變量反饋給前后控制器實施最優控制。
其中,LQR(linear quadratic regulator)即線性二次型調節器算法理論使用最為廣泛,其對象是現代控制理論中以狀態空間形式給出的線性系統,而目標函數為對象狀態和控制輸入的二次型函數。LQR最優設計是指設計出的狀態反饋控制器K要使二次型目標函數J取最小值,而K由權矩陣Q與R唯一決定,故此Q、R的選擇尤為重要。LQR理論是現代控制理論中發展最早也最為成熟的一種狀態空間設計法。
算法概要如下:
設懸架自由度彈簧阻尼系統動力方程為:

2.1.2 自適應模糊控制
由于車輛懸架振動系統是含有許多不確定因素的非線性動力系統,難以用定常反饋系統達到預定的控制性能要求。應用于車輛懸架振動控制的自適應控制方法主要有自校正控制和模型參考自適應控制兩類控制策略。自校正控制是一種將受控對象參數在線識別與控制器參數整定相結合的控制方法。模型參考自適應控制的原理是當外界激勵條件和車輛自身參數狀態發生變化時, 被控車輛的振動輸出仍能跟蹤所選定的理想參考模型。
自適應控制存在的問題表現在自校正控制過程需要在線辨識大量的結構參數,所以導致計算量大,實時性不好。而模型參考自適應控制方法涉及路面信息獲得的精度問題,這一點與預測控制存在的問題相似。另外,當懸掛系統參數由于突然的沖擊而在較大的范圍變化時,自適應控制的魯棒性將變壞。
2.1.3 天棚阻尼與開關阻尼控制
天棚阻尼與開關阻尼控制原理是在車身上安裝一個與車身振動速度成正比的阻尼器,產生與車體絕對速度成正比的控制力,可以完全防止車身與懸架系統產生共振,達到衰減振動的目的。在天棚控制方式中,控制力取決于車體的絕對速度的反饋,不需要很多傳感器也不需要復雜的數學模型,可靠性較好。
開關阻尼控制思想的阻尼力算法可用以下公式表示
2.2 主動懸架常用的控制方法
主動懸架控制機構是由電控單元ECU和傳感器等組成的閉環控制系統,通過傳感器監測道路條件、汽車運行狀態,按照設定的控制規律向執行機構(空氣彈簧、動力源等)適時地發出控制信號,以調節懸架剛度和阻尼系數,主動地調整和產生所需的控制力,使懸架始終處于最佳減振狀態。典型的主動懸架控制示意圖如圖5。
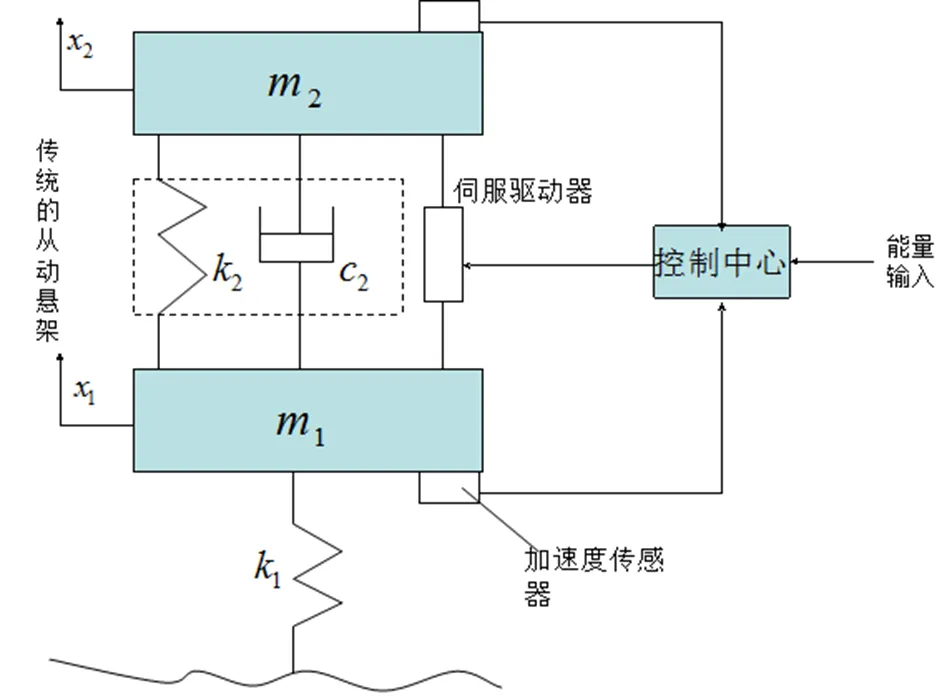
圖5 典型的主動懸架控制示意圖
其中,基于遺傳算法和神經網絡的車輛主動懸架控制技術、基于免疫算法的車輛主動懸架控制技術為兩種十分典型的主動懸架控制技術。
2.2.1 基于遺傳算法和神經網絡的車輛主動懸架控制技術
遺傳算法作為一種非確定性的擬自然算法,為復雜系統的優化提供了一種新的方法,實踐證明其效果顯著;其基本思想是模擬自然界遺傳機制和生物進化論而形成的一種隨機搜索與優化算法。人工神經網絡是指將具有一定處理能力的單元按一定方式相互聯結以模擬人類神經系統的信息處理機制,能夠有效地解決各類復雜問題。

神經網絡系統采用雙隱層的結構,學習算法中的權系數學習規律采用學習率自適應調整與動量項相結合的改進算法,即

動量項使調節向著誤差曲面底部的平均方向變化,起到緩沖平滑的作用,使學習速率加快。
遺傳神經網絡控制算法流程圖見圖6,采用神經網絡對系統的動態響應進行模擬,同時應用遺傳算法進行尋優,調整網絡權值,使得懸架系統的動態響應達到預期效果。基于遺傳算法神經網絡的懸架控制方法對于改善車輛行駛平順性有顯著效果,所提出的控制方法對所建立的主動懸架模型有良好的適應性。
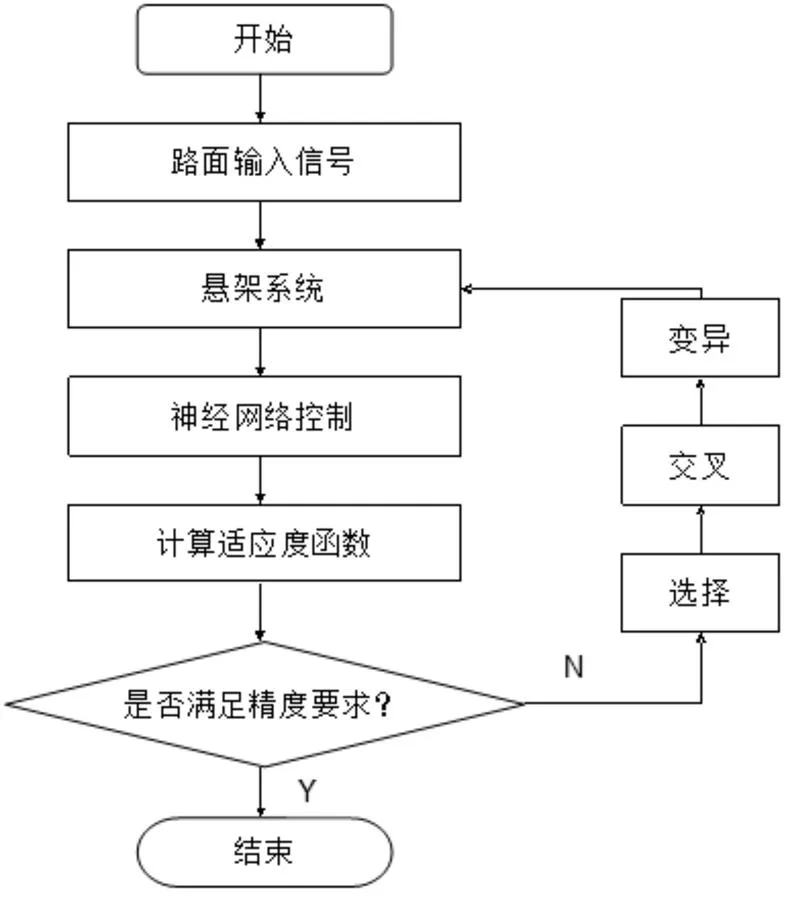
圖6 控制算法流程圖
2.2.2 基于免疫算法的車輛主動懸架控制技術
免疫的實質是抵御外界抗原侵入的自我保護能力和自適應能力。免疫算法的優點在于具有良好的系統響應性和自主性,有很好的智能型和魯棒性,因此被運用到車輛懸架系統中,進行相應的系統仿真分析。
汽車主動懸架的免疫控制系統,以車身加速度和速度、懸架和車輪變形為輸入,力發生器控制力為輸出。免疫控制器在接受模型狀態輸入后,根據免疫算法得出最佳的控制力,從而使懸架的性能得到提高,其主動懸架的免疫控制系統框圖見圖7。免疫控制器在接受模型狀態輸入后,根據免疫算法得出最佳的控制力,從而使懸架的性能得到提高。算法實現流程見圖8。
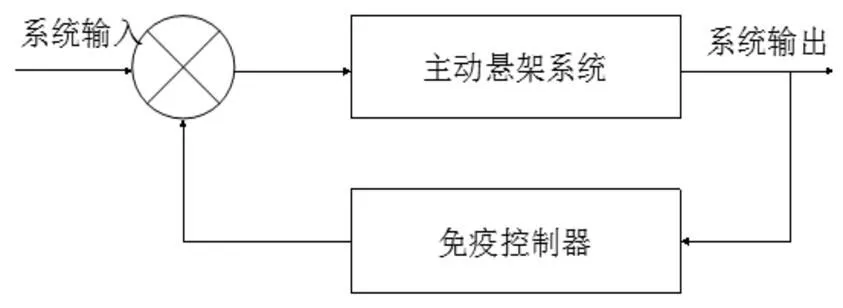
圖7 汽車主動懸架的免疫控制系統框圖
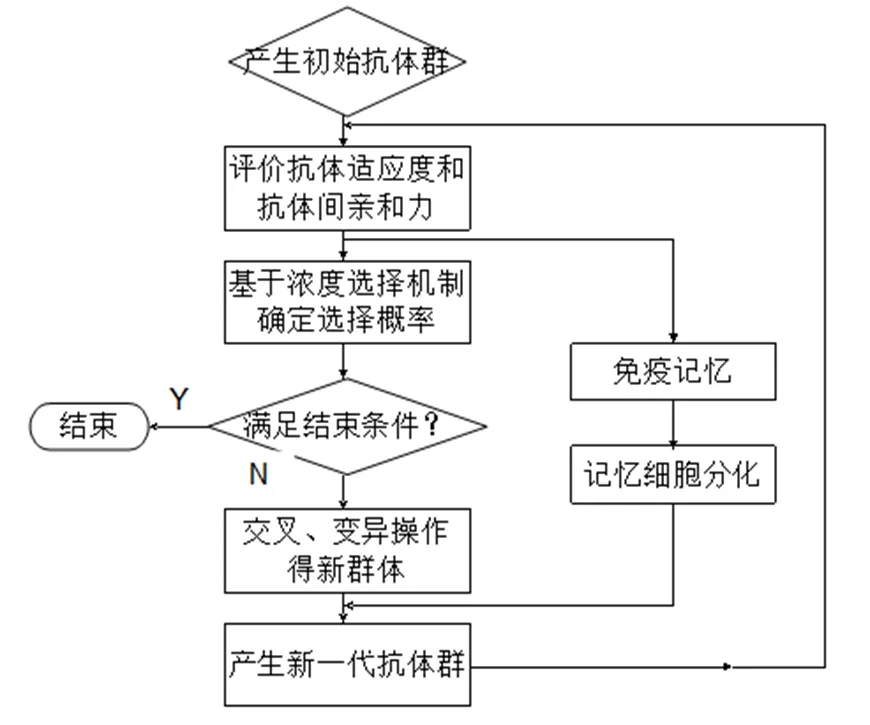
圖8 免疫算法實現流程圖
3 結束語
本文首先對三類懸架(被動懸架、半主動懸架、主動懸架)作了簡單的敘述,然后分別闡述了半主動懸架和主動懸架常用的控制方法及理論。然而隨著相關學科和高新技術的迅猛發展,特別是高效價廉微處理機的普及,使得研究實用的半主動和主動懸架振動控制系統成為現實。半主動懸架控制系統剛開始進入實際應用階段;主動懸架控制系統由于其造價昂貴、需要額外的控制用功率等原因,至今仍停留在實驗室和真車試驗階段。最后,為了更理想地實現汽車懸架控制系統的研究目標,必須解決如下幾個方面的問題:(1)研制高效能的減振器,如液力減振器、阻尼連續可調的磁流變減振器等。尤其是以磁流變可控流體器件的半主動懸架系統,它具有結構簡單、耗能低、反應迅速等特點,具有較為廣闊的應用前景。(2)充分運用現代控制理論及相關學科的技術,處理好懸架系統的非線形控制問題,研制高效能、低成本的控制器。(3)目前主動懸架系統控制結構復雜,可靠性也難以保證,因此簡化系統結構、提高可靠性和適應性也是重要的研究方向。
[1] 張廟康, 胡海巖. 車輛懸架振動控制系統研究的進展[J]. 振動、測試與診斷, 1997, 17(1):7-15.
[2] 管繼富. 車輛半主動懸架自適應LQR控制[J]. 系統仿真學報,2004.16(10): 2340-2343.
[3] 祁建城, 李若新, 劉志國,等.汽車主動懸架最優控制[J]. 汽車工程, 1999,21(1) : 15-20
[4] 錢瑜. 汽車懸架分類及半主動懸架[J]. 江南學院學報, 1999, 14(4):73-76.
[5] 丁科,等. 車輛主動懸架的神經網絡模糊控制[J]. 汽車工程, 2001,(5).
[6] 祁建城, 高延齡. 汽車主動懸架最優控制[J]. 汽車工程, 1999, 21(1):15-20.
[7] 孫求理,張洪欣. 主動懸架的發展和技術現狀[J]. 世界汽車,1996,(5):4-6.
[8] R. G. M. Huinan.Preview estimation and control for semi-active suspensions[J]. Vehicle system, 2000,(2).
[9] Shiotsuka T,Egami M,Nagamatsu A. Design and control of dynamic compensator-type controller using neural network[J]. Transactions of the Japan Society of Mechanical Engineers, Part C,1994,60(572):1296-1302.
[10] Yoshimura T.Active suspension of vehicle system using fuzzy logic[J].International Journal of systems Science,1996,(2):215-219.
Study on the Type and Method of Automobile Suspension Control System
LI Jing
(School of Automotive Engineering, Wuhan University of Technology, Wuhan Hubei 430070, China)
This paper summarizes the basic types and characteristics of automobile suspension control system, focuses on the semi-active control and active control of several commonly used control methods of suspension system.And it puts forward some suggestions for the future development direction of automobile suspension control system.
automobile; Suspension; Active Control; Semi-Active Control
U463.33
A
2095-414X(2013)03-0052-05
李靖(1990-),男,碩士研究生,研究方向:汽車綠色可循環設計.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
數學物理學報(2017年6期)2018-01-22 02:26:40
作文大王·低年級(2016年4期)2016-04-18 00:24:37
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
決策探索(2014年21期)2014-11-25 12:29:50
計算物理(2014年2期)2014-03-11 17:01:44