新能源汽車散熱風扇驅動系統仿真研究
2013-10-25 12:39:06張程,金濤
中國測試 2013年1期
張 程, 金 濤
(1.福州大學電氣工程與自動化學院,福建 福州 350108;2.福建工程學院電子信息與電氣工程系,福建 福州 350108)
0 引 言
蓄電池是新能源汽車的核心部件,直接影響著汽車的使用性能和續駛行程等。要保證新能源汽車可靠安全的行駛,必須采取有效的散熱措施對電池進行強制散熱以保證其動力電池的可靠安全工作[1]。本文研究的電池散熱風扇屬于離心式風機,以外轉子式的三相永磁同步電機作為驅動電機。永磁同步電機(PMSM)具有體積小、重量輕、能量轉換效率高、運行可靠性高、調速范圍廣等優點,已經逐步取代直流伺服電動機而用于高性能的交流伺服系統中[2];因此,建立永磁同步電機控制系統的仿真模型對驗證各種控制算法、優化整個控制系統具有十分重要的意義[3]。這里在分析PMSM數學模型的基礎上,借助于Matlab/Simulink強大的仿真建模能力,在Simulink中建立PMSM控制系統的仿真模型,通過對實例電機的仿真,給出了各種仿真波形,為實際新能源汽車蓄電池的可靠散熱控制系統的設計和調試提供了有效的途徑。
1 PMSM的數學模型
永磁同步電機在忽略鐵心飽和與電機繞組漏感,并且假設氣隙中磁勢呈正弦分布,同時又忽略磁場高次諧波的情況下,運用坐標變換理論,可以得到在同步旋轉d-q坐標系下的數學模型,通常由電壓方程、定子磁鏈方程、電磁轉矩方程、機械運動方程組成,具體有:

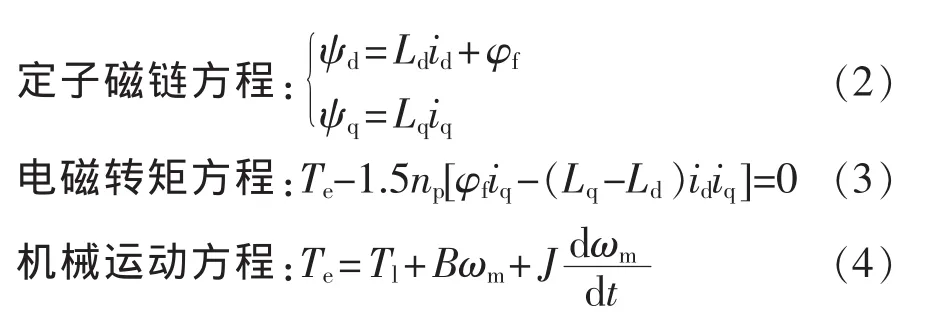
式中:ud、uq——定子電壓d、q軸分量;
id、iq——定子電流d、q軸分量;
ψd、ψq——定子磁鏈d、q軸分量;
Ld、Lq——定子繞組d、q軸電感;
Rs——繞組電阻;
ωr——轉子永磁體產生的磁鏈;
Te——電機電磁轉矩;
Tl——負載轉矩;
J——電機轉動慣量;
p——電機轉子極對數;
ωm——機械轉子角速度;
B——阻尼系數。
2 散熱風扇控制系統方案設計
系統使用轉速-電流雙閉環控制方案[4],考慮到PMSM進行變頻調速時的強耦合、時變、非線性等特點,在內環對永磁同步電機進行空間矢量脈寬調制(SVPWM)控制,為了增強系統的魯棒性及抗干擾能力,在外環采用速度PI控制器。系統原理框圖如圖1所示,主要由坐標變換、SVPWM、三相逆變器、PI控制器等模塊組成。
3 散熱風扇控制系統的模型建立及分析
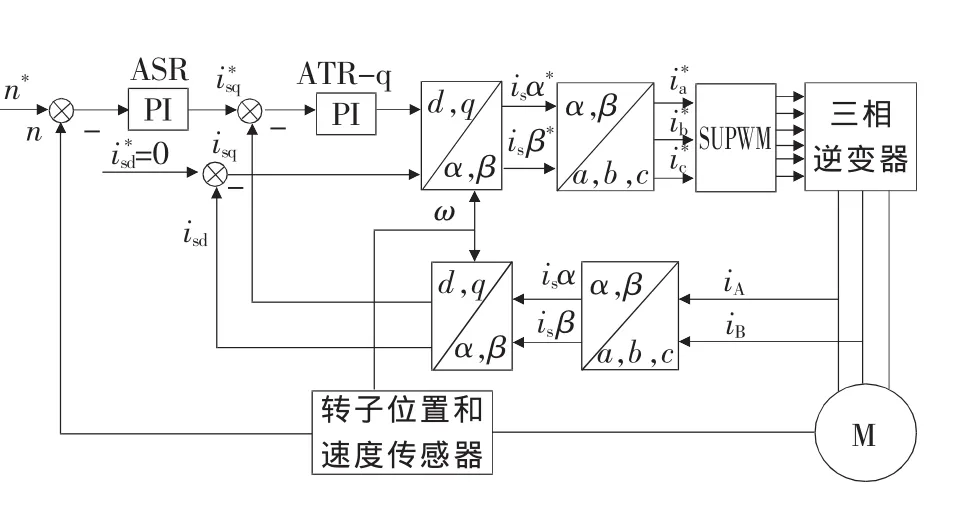
圖1 系統原理框圖
根據模塊化建模的思想,將永磁同步電機的散熱風扇控制系統分為若干個功能不同且獨立的子模塊,主要包括速度控制器模塊、矢量控制模塊、坐標變換模塊、PWM發生器模塊、PMSM本體模塊等[5-6]。在Matlab的Simulink環境下,通過這些功能模塊的有機組合,建立永磁同步電機矢量控制系統的仿真模型,實現雙閉環控制。
根據永磁同步電機系統原理結構,在Matlab7.0的Simulink仿真環境下,利用SimPowerSystem里面豐富的模塊庫,在分析永磁同步電機數學模型的基礎上,建立永磁同步電機控制系統的仿真模型,仿真模型框圖如圖2所示。
模型建好后,就可直接對它進行相應的仿真分析。選擇合適的輸入源模塊做信號輸入,用適當的接收模塊(如示波器)觀察系統響應,分析系統特性。點擊菜單欄Simulation上的Start命令開始仿真,結果輸出到接收模塊上。還可以修改系統模塊及參數,來修正不符合要求的仿真結果,繼續進行仿真分析。
3.1 速度控制模塊
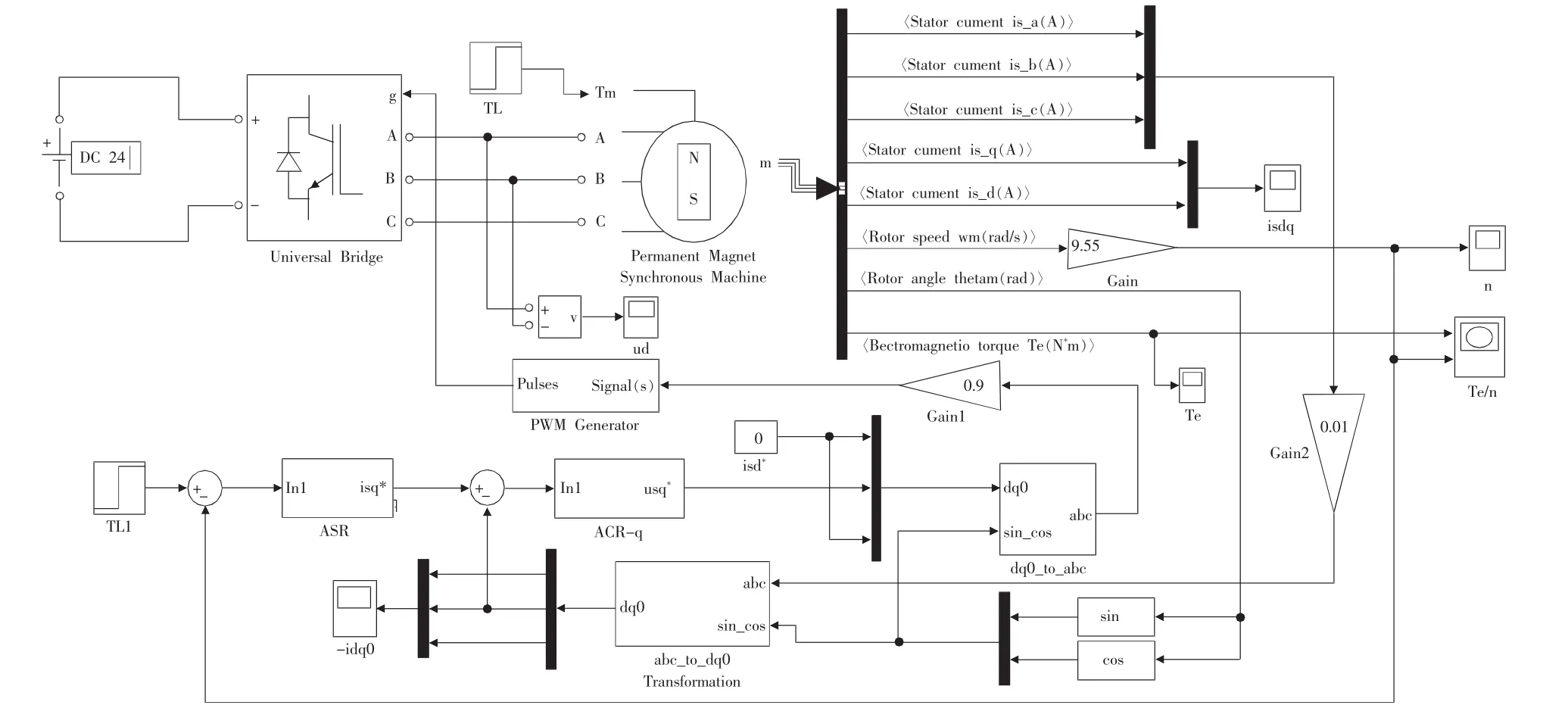
圖2 散熱風扇控制系統的PMSM仿真模型圖
速度控制模塊的結構框圖如圖3所示,可以看出速度控制模塊的結構比較簡單,由PI調節器和限幅輸出模塊組成。通過反復調整使Kp=11.7,Ki=140,讓系統輸出達到最佳狀態。電流調節其實就是轉矩調節模塊,將轉速調節器的輸出電流作為轉矩調節器的輸入,其中Saturation飽和限幅模塊的功能是將輸出的三相參考相電流限定在要求的范圍之內。電流調節模型圖與轉速調節模型圖相同。
3.2 坐標變換模塊
坐標變換模塊的結構框圖如圖4所示。坐標變換模塊實現的是d-q軸旋轉坐標系下的兩相電流向abc靜止坐標系下的三相電流的等效變換,如式(5)所示。
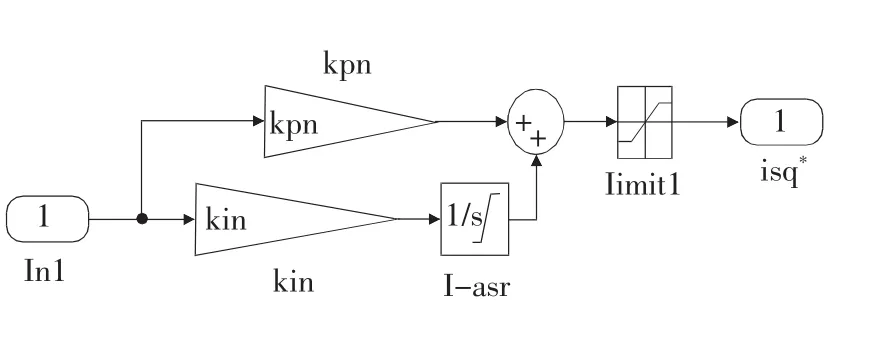
圖3 轉速控制模塊結構框圖
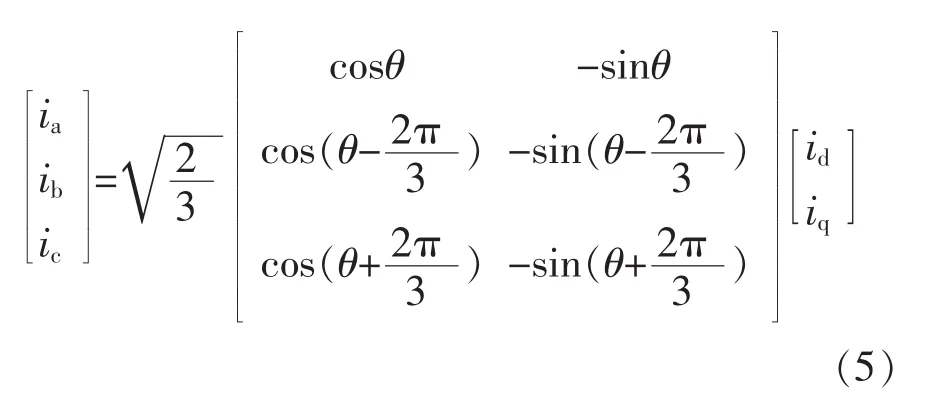
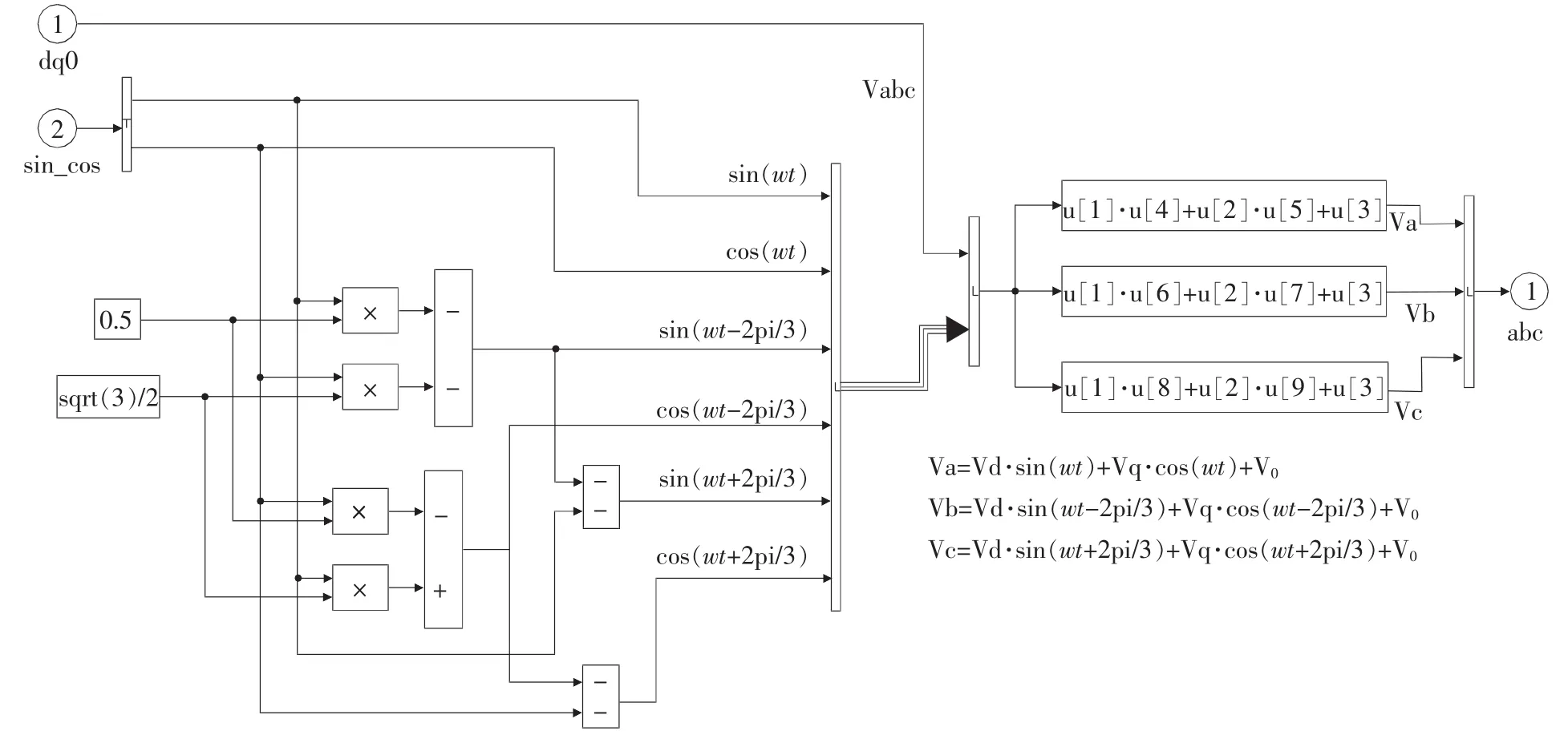
圖4 坐標變換模塊結構框圖
3.3 PWM發生器模塊
PWM發生器模塊為逆變橋提供SVPWM (脈寬調制)觸發信號,可以采用Matlab7.0的Simulink中的SimPowerSystem模塊庫中提供的通用逆變模塊搭建。
4 系統的仿真及分析
根據圖2所示的散熱風扇控制系統的仿真電路圖對系統進行仿真實驗和性能分析,以驗證其可行性和有效性。仿真參數的設置如下:逆變器直流電源電壓為24 V,IGBT的開關頻率設置為 15.2 kHz,負載轉矩起始值為0.5N·m,在0.1s時降至0.2N·m,仿真時間 t=0.2s,當參考速度 speed(ref)=2000r/min 時,由示波器觀測各參數波形圖,仿真結果如圖5所示。
永磁同步電機的參數[7]設置如表1所示。
從圖5(a)中可以看出電機在啟動后的0.02s內轉速快速上升,并在經過0.01s的波動之后迅速達到穩定狀態,系統響應較快且較平穩,實際轉速能快速跟蹤參考轉速幾乎無超調,電機動態響應性能良好。圖 5(b)和圖 5(c)中可以看出 0.03 s之前轉矩和電流都出現很大的振蕩,這是因為電機啟動初期轉子轉速低于定子旋轉磁場轉速,定子磁鏈和永磁體磁鏈產生的轉矩在較短的時間內起到制動作用。當牽引轉矩小于制動轉矩時,電機總轉矩下降,從而出現振蕩現象,此時轉矩值為0.5 N·m,在0.1 s突降為0.2N·m的負載時,轉矩和電流均有相應響應,但經過短暫的波動之后均達到穩定狀態,電磁轉矩能跟蹤負載轉矩,穩態時轉矩和電流略有波動,但基本平穩。圖5(d)為電機的機械特性曲線,可以看出機械特性較為理想。
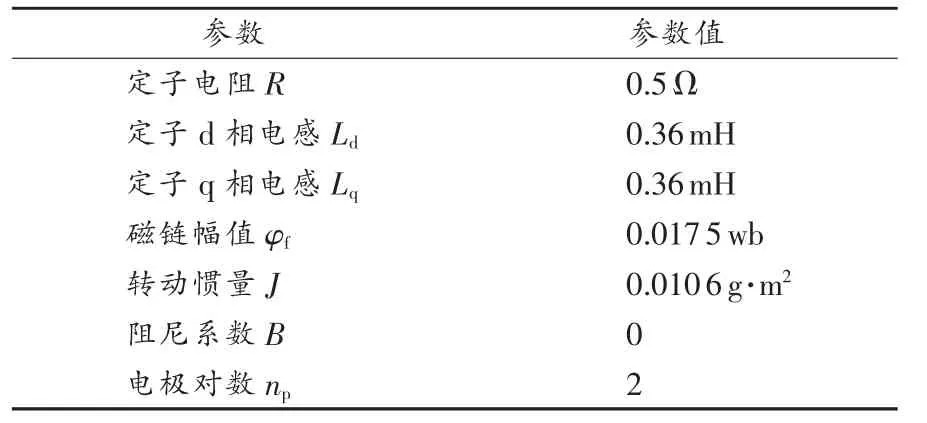
表1 PMSM參數表
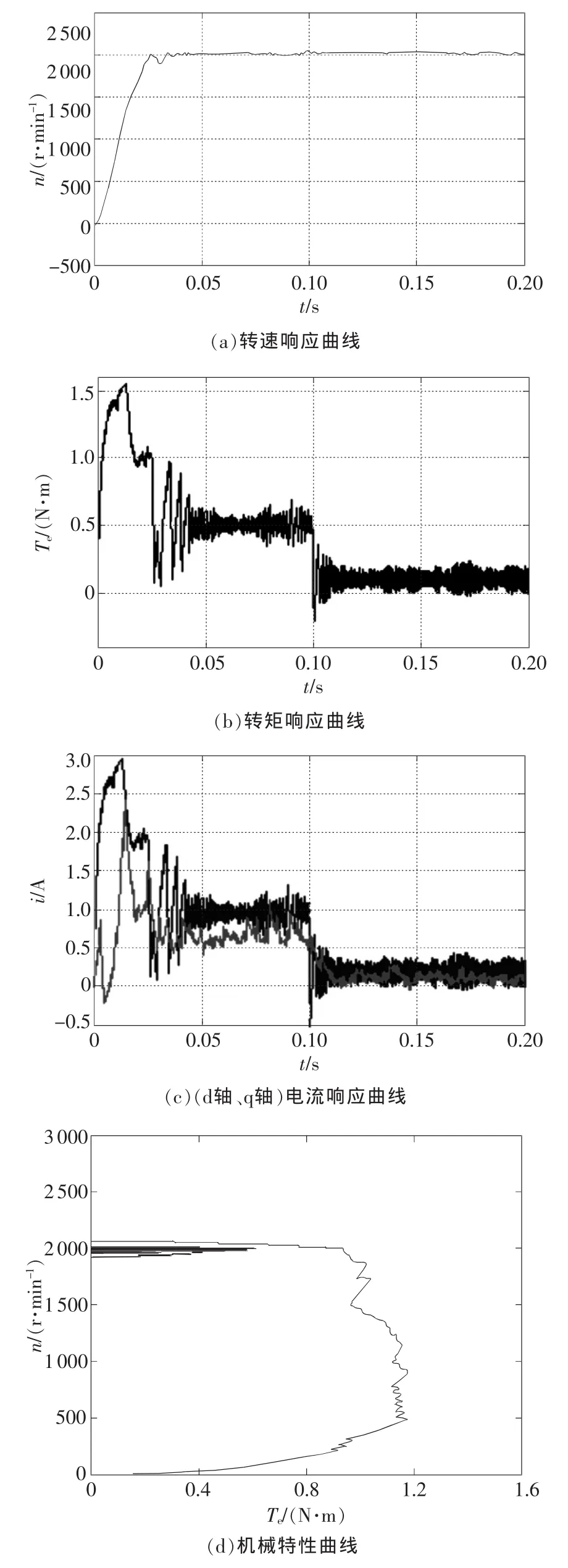
圖5 散熱風扇系統轉速、轉矩、電流及機械特性曲線
5 結束語
在分析永磁同步電機數學模型的基礎之上,建立了電機的數學方程,通過數學的方法去研究永磁同步電機,并在Matlab/Simulink里搭建模型進行仿真。由電機仿真波形可以看出,系統具有調速范圍較寬、動態響應好、穩態誤差較小的特點[8-9],這與實際散熱風扇的運行狀態是一致的,系統起動后保持恒定轉矩,突加擾動時系統波動較小,充分說明系統具有較好的魯棒性,為新能源汽車散熱風扇驅動系統的分析與設計提供了新穎的思路。
[1]王兆安,白繼彬,牛新國,等.新能源汽車與電力電子技術[M].北京:機械工業出版社,2010(1):34-75.
[2]愛賽尼,倪光正.現代電動汽車、混合動力電動汽車和燃料電池車-基本原理、理論和設計[M].熊素銘譯.北京:機械工業出版社,2010(10):150-180.
[3]吳紅星.開關磁阻電機系統理論與控制技術[M].北京:中國電力出版社,2010(8):10-20.
[4]陳榮.永磁同步電機控制系統[M].北京:中國水利水電出版社,2009:30-39.
[5]何苗,劉政華.基于DSP的無傳感器永磁同步電機控制器設計.維特電機[J].計算機仿真,2010,38(10):63-65.
[6]田曉強,易建軍,陳昌明,等.基于DSP的沖壓材料成型控制規律的研究[J].中國測試,2010,36(3):1-5.
[7]王春民,嵇艷鞠,欒卉,等.Matlab/Simulink永磁同步電機矢量控制系統仿真[J].吉林大學學報:信息科學版,2009,27(1):17-22.
[8]李學文,李學軍.基于Simulink的永磁同步電機建模與仿真[J].河北大學學報:自然科學版,2007,27(SI):28-31.
[9]張亞軍,楊盼盼.純電動汽車再生制動系統的建模與仿真[J].武漢理工大學學報,2010,32(15):90-94,98.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19