基于SVD-SURF 的寬基線魯棒景象匹配算法
2013-10-21 00:58:16李耀軍趙春暉
火控雷達技術 2013年4期
李耀軍 潘 泉 趙春暉
(1.西安電子工程研究所 西安 710100;2.西北工業(yè)大學 西安 710072)
0 引言
寬基線一詞用于圖像配準領域時,泛指待配準圖像間存在著明顯的差異,如較大的位置、角度、尺度及光照等變化[1]。寬基線條件下圖像中即使是同一特征,所表示出來的光學、幾何等特性都有很大不同,加上噪聲、模糊、遮擋等其它因素存在,都大大增加了寬基線圖像配準的難度。寬基線圖像配準中對圖像幾何變換、光照變換、噪聲影響、圖像畸變等因素都能夠保持穩(wěn)定性的特征,稱為不變特征(Invariant Feature)[1]。鑒于不變特征在圖像配準領域的顯著優(yōu)勢與巨大應用價值,國內(nèi)外不少學者對此展開了研究[1-10]。
在衛(wèi)星導航不可用的情況下,利用景象匹配精確定位輔助慣性導航,是目前無人機容錯型導航系統(tǒng)可靠的備用方案之一。考慮到無人機平臺的特殊性,如飛行姿態(tài)實時變化,導致實時圖和基準圖之間存在大角度旋轉(zhuǎn)、劇烈光照變化等差異,傳統(tǒng)的模板匹配算法由于需要借助無人機平臺的實時運動狀態(tài),如姿態(tài)、高度等,預先估計出實時圖相對于基準圖的旋轉(zhuǎn)因子和尺度因子,然后再進行配準。這不僅增加了系統(tǒng)的復雜度,而且通過航向偏差得到的旋轉(zhuǎn)角度精度較低,難于補償圖像仿射變換或投影變換帶來的誤差。與傳統(tǒng)模板匹配算法相比,基于不變特征的配準算法在精度和魯棒性方面均具有較大優(yōu)勢。
SURF 特征,即快速魯棒特征[7](Speeded-Up Robust Features,SURF),它是一種新的局部不變特征算子。SURF 對子區(qū)域的梯度信息進行了整合,有效解決了幾何變換、畸變、仿射變換、視角變換、亮度變換、噪聲干擾等情況下的匹配問題。Oconaire C等[8]使用SURF 特征進行圖像定位,Gossow D 等[9]利用SURF 特征進行目標探測,Zhang Zhanyu 等[10]使用SURF 實現(xiàn)視覺同步定位于構(gòu)圖(SLAM)等。
圖像領域中奇異值[11](singular value decomposition,SVD)作為圖像的一種代數(shù)特征,已經(jīng)在圖像識別中得到成功應用。圖像的奇異值具有良好的穩(wěn)定性,奇異值反映了圖像的一種代數(shù)本質(zhì),這種本質(zhì)不是直觀的,而是一種內(nèi)在屬性,它具備代數(shù)和幾何上的不變性[12]。通過對實時圖與基準圖進行奇異值分解后,將不易受隨機因素干擾的信息作為該模式的特征提取出來,具有增強識別精度、減少運算量和提高運算速度的作用,且奇異值特征具有良好的可區(qū)分性、穩(wěn)定性和獨立性[13]。
面向無人機視覺導航,針對景象匹配的核心技術和難點問題之一,即寬基線條件下的景象匹配,提出一種基于SVD-SURF 的寬基線魯棒景象匹配(SVD-SURF-Based Wide Baseline Robust Scene Matching,S2WB-RSM)算法。深入研究實時圖與基準圖之間發(fā)生較大平移、旋轉(zhuǎn)、尺度變化、亮度變化等條件下的魯棒特征檢測、描述與快速、精確匹配問題。
1 奇異值特征向量
1.1 奇異值分解[14]
若矩陣A∈Rm×n,則存在正交矩陣U={u1,u2,…,um}∈Rm×m,V={v1,v2,…,vn}∈Rn×n,使得UTAV=diag{σ1,σ2,…,σp}=W,p=min(m,n),即A=UWVT,則稱為A 的奇異值分解。其中,σ1≥σ2≥…≥σp≥0,σi(i=1,2,…,p)為A 的奇異值,是AAT或ATA 的特征值的平方根,即
1.2 奇異值特征向量
a.特征向量
定義 設A 是n 階方陣,若有數(shù)λ 和非零向量x,使得

稱數(shù)λ 是A 的特征值,非零向量x 是A 對應于特征值λ 的特征向量。
b.奇異值特征向量的幾何性質(zhì)
奇異值向量具有如下幾何性質(zhì)[11,15,16]:
· 穩(wěn)定性。由于奇異值特征向量具有良好的穩(wěn)定性,所以它對圖像噪音、圖像光照條件引起的灰度變化具有不敏感的特性。
· 轉(zhuǎn)置不變性。A 和AT有相同的奇異值,即對應于同一個奇異值特征向量。
· 旋轉(zhuǎn)不變性。圖像A 和旋轉(zhuǎn)后的圖像有相同的奇異值特征向量。
· 位移不變性。對圖像的位移變換可歸結(jié)為對圖像矩陣作行(或列)的置換,原始圖像A 與其交換兩行(或兩列)后的圖像有相同的SVD 特征向量。
· 鏡像變換不變性。若對任何一個正交于x的向量y,有關系T(y+ax)=y-ax,其中,a 是實常數(shù),則稱變換T 為鏡像變換。奇異值特征向量具有鏡像變換不變性。
c.奇異值特征向量降維[17]
根據(jù)奇異值分解的定義,m×n 維圖像矩陣奇異值分解后,得到的奇異值個數(shù)為p=min(m,n)。如果對p 個奇異值特征進行匹配,由于p 值較大,導致計算量較大,嚴重影響匹配的實時性。若根據(jù)定理1 和定理2 對奇異值特征向量進行降維[12],保留圖像矩陣的較大奇異值,即忽略較小奇異值,再進行匹配,則可大大減小計算量,極大提高匹配的實時性。
定理1 若矩陣A ∈Rm×n,A 的SVD 由上述定義給出,且σ1≥σ2≥…≥σr?σr+1=…=σp=0,p=min(m,n),則其中,Ur={u1,u2,…,ur},Vr={v1,v2,…,vr},Wr=diag(σ1,σ1,…,σr)。
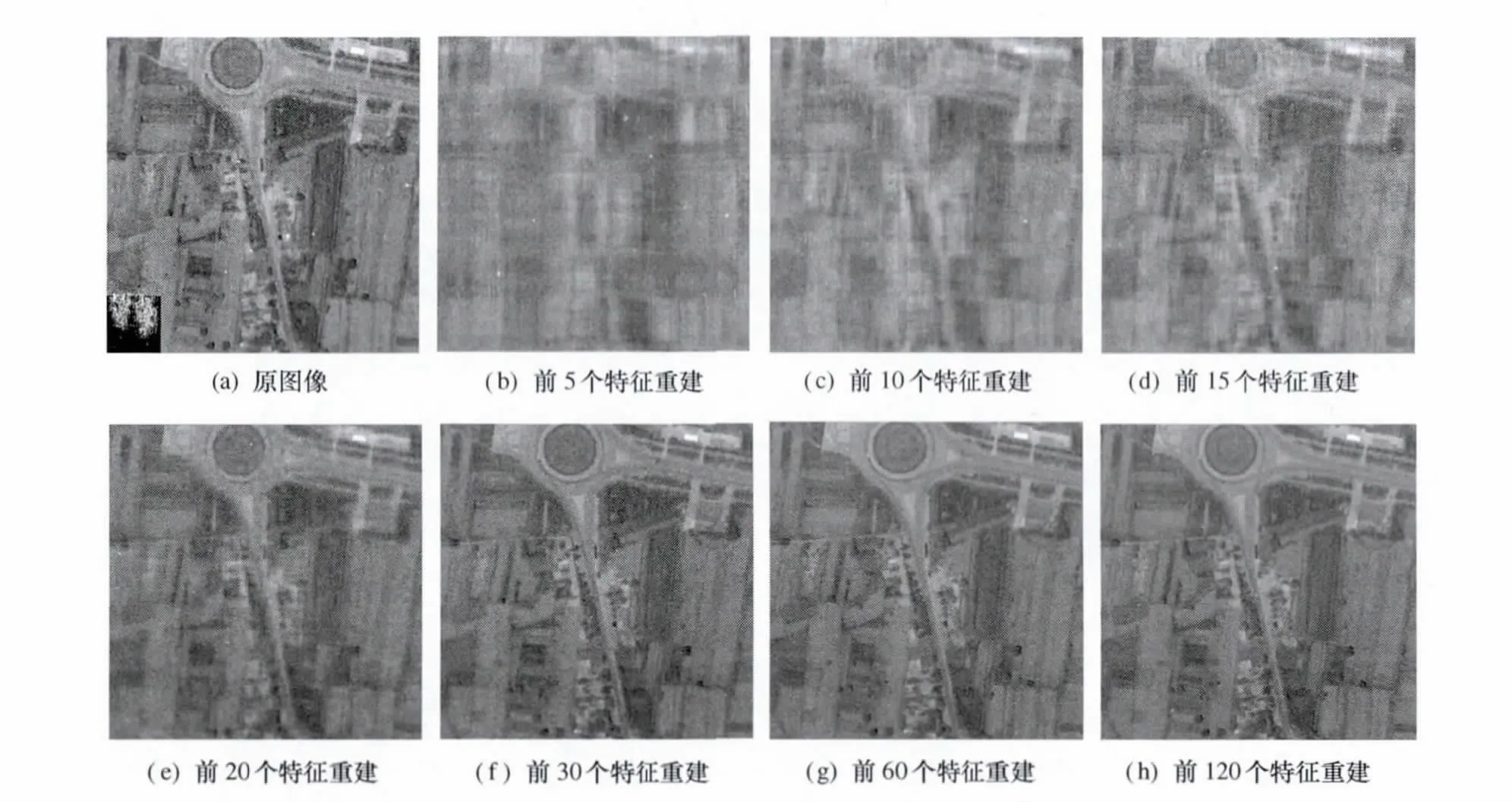
圖1 原圖像和重建后的圖像
定理1 將矩陣表示成了秩r 矩陣的和,同時將矩陣中向量組的相關性問題轉(zhuǎn)化為矩陣的非零奇異值個數(shù)問題。此時,矩陣的秩等于非零奇異值個數(shù)。
定理2 假設A ∈Rm×n,A 的SVD 由上述定義給出,且rank(A)=r ≥s,m,n,r,s 均為正整數(shù)。若Ws因此,rank(As)=rank(Ws)=s,則‖A
定理2 表明,在Frobenious 范數(shù)意義下,As是在空間Rm×n
s (秩為s 的m×n 維矩陣構(gòu)成的線性空間)中A 的一個降秩最佳逼近。也即是說,在Frobenious范數(shù)意義下,As是A 中所有秩為s 矩陣的一個最佳逼近。從定理1 與定理2 可知,奇異值特征向量降維是舍棄某些較小奇異值的過程。將圖像矩陣進行奇異值分解,再通過奇異值特征向量降維可獲得圖像矩陣的有效秩。這里,有效秩為所保留的奇異值個數(shù)。由保留奇異值生成的新圖像矩陣是原始圖像矩陣在Frobenious 范數(shù)意義下的一個降秩最佳逼近[17]。
奇異值特征向量降維時要在計算復雜度和正確識別率之間權衡。選的特征數(shù)太少影響識別,太多會增加計算量。圖2 從左向右依次是原圖像及其相應的提取5、10、15、20、30 個特征重建后的圖像。從圖1 中可以看出30 個特征重建后的圖像和原圖很接近,從直觀上說明奇異值特征向量降維是可行的,并可大幅度減小特征匹配的計算量,提高景象匹配的實時性。
d.奇異值特征向量排序[13]
奇異值向量中的特征均為從大到小排序,亦即,所有類別樣本的奇異值向量具有結(jié)構(gòu)相似的模式特征,這種特征雖然具有獨立性,但其可區(qū)分性和穩(wěn)定性較弱。如果直接將該矢量輸入支持向量機訓練,則其學習能力和推廣能力都很差。對特征矢量的分量進行重排序,從而使得相同類別圖像具有相同的結(jié)構(gòu)特征和不同類別圖像具有不同的結(jié)構(gòu)特征,從而使其特征具有可區(qū)分性、穩(wěn)定性和獨立性。文獻[15]給出了詳細過程。
2 S2WB-RSM 算法原理
為實現(xiàn)S2WB-RSM 算法,首先需要對實時圖與基準圖分別進行奇異值分解、特征向量降維和歸一化及排列。在此基礎上,構(gòu)建了SURF 尺度空間,運用快速Hessian 矩陣定位極值點,計算出實時圖的64 維SURF 特征描述子,基于SVD 完成特征向量的特征計算,利用SVD 算法建立匹配矩陣并獲得特征點間的對應關系。然后,基于Hessian 矩陣跡完成特征點匹配。最后,使用隨機抽樣一致性(RANSAC)方法剔除出格點,實現(xiàn)位置參數(shù)的精確估計。
2.1 奇異值特征向量提取
S2WB-RSM 算法奇異值特征向量提取共六個步驟,具體如下:Setp 1:圖像數(shù)字化;Setp 2:圖像灰度化;Setp 3:圖像奇異值分解;Setp 4:特征值向量提取;Setp 5:特征值向量排序;Setp 6:前k 較大特征向量提取。
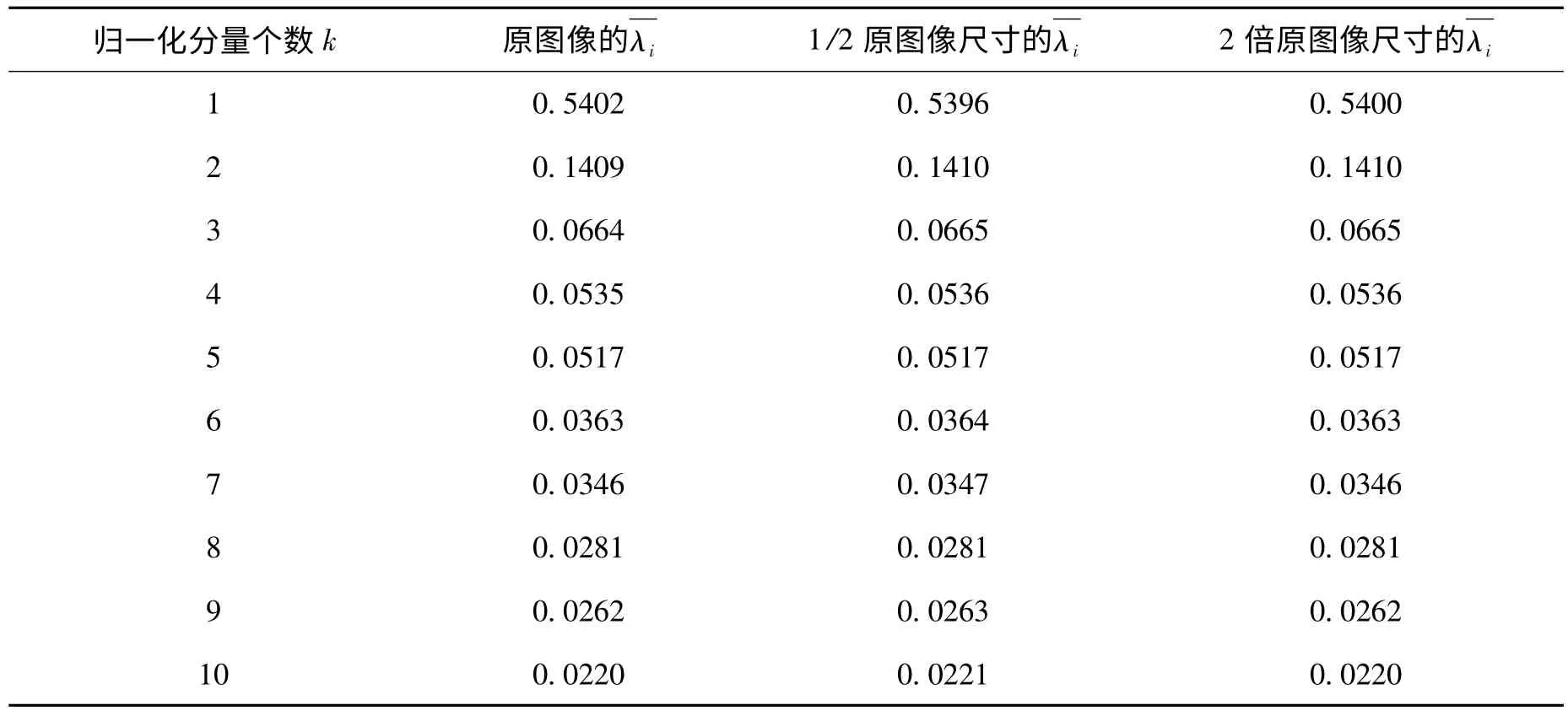
表1 圖像縮放變換時奇異值特征矢量的前k 個歸一化分量(k=10)
矩陣奇異值分解具有穩(wěn)定性。當圖像縮放程度不大時,奇異值特征矢量的誤差可視為小范圍內(nèi)的噪聲擾動,對景象匹配的配準誤差影響并不大。所以,奇異值特征矢量的不變性可顯著提高景象匹配的魯棒性。表1 顯示了圖像縮放變換時奇異值特征矢量的前k 個歸一化分量,其中

通過計算圖像縮放變換時奇異值特征矢量的前10 個分量,驗證了圖像奇異值特征矢量在縮放變換下具有的不變性。實驗表明,該性質(zhì)與奇異值特征矢量在其他變換條件下的不變性一樣,是奇異值特征矢量作為圖像代數(shù)特征的一個重要體現(xiàn)。
2.2 SURF 特征提取與匹配
為了實現(xiàn)SURF 特征提取與匹配,首先構(gòu)建SURF尺度空間,運用快速Hessian 矩陣定位極值點,計算出航空圖像的64 維SURF 特征描述子;然后,基于Hessian 矩陣跡完成特征點匹配;最后,使用RANSAC 方法剔除出格點,實現(xiàn)位置參數(shù)的精確估計。
上述SURF 特征提取與匹配過程主要包括兩個部分:無人機航空序列圖像的SURF 特征描述子提取和無人機航空序列圖像的SURF 特征點匹配。具體實現(xiàn)步驟如下:Setp 1:多尺度空間構(gòu)建;Setp 2:快速Hessian 矩陣檢測;Setp 3:SURF 特征描述子提取;Setp 4:基于Hessian 矩陣跡的特征點匹配;Setp 5:基于RANSAC 的局部參數(shù)估計。
2.3 算法性能分析
a.復雜度分析
主要從兩個過程對S2WB-RSM 算法的復雜度進行分析與優(yōu)化:多尺度空間構(gòu)建和特征描述子的建立。下文以尺度不變特征變換(SIFT)算法為參照,對S2WB-RSM 算法的復雜度作深入分析。在多尺度空間構(gòu)建方面,高斯拉普拉斯(LOG)算子被認為是準確性最高的,但其在算法的時間復雜度方面卻很欠缺,SIFT 算法采用的高斯差分(DOG)算子,在很大程度上近似于LOG 算子,但因為采用了以階差分來近似作為尺度空間的值,避免了梯度的求解,從而降低了時間復雜度,但仍不可避免的要在構(gòu)建尺度空間時要對每個點作不同的浮點高斯卷積運算,程序的時間復雜度仍很大。而算法在特征點的提取方面采用了另外的一種方法,即使用Hessian矩陣的值作為點該尺度空間的值,Hessian 矩陣采用的方法在原理上和LOG 算子也有很大的相似處,二維的高斯函數(shù)是LOG 算子的基礎,Hessian 矩陣的分量Dxx、Dxy、Dyy,分別和高斯函數(shù)的二階方向?qū)?shù)?2g(σ)/?x2、?2g(σ)/?x?y、?2g(σ)/?y2對應的相似關系,因此采用Hessian 矩陣的方陣值來表示多尺度空間的值有近似的效果,而且由于算法事先已經(jīng)計算出了圖像的積分圖像,若計算任意區(qū)域的點則只要采用查表法就可實現(xiàn),避免了DOG 算子在構(gòu)建尺度空間時進行大量的浮點運算,從而加速的尺度空間的構(gòu)建過程。
在特征描述子的建立方面,兩者的復雜度也有稍微的不同。SIFT 算法為了得到更穩(wěn)定的特征點,在局部區(qū)域進行了特征點的重新估算,在主方向的基礎上,找到了其副方向,并對特征點的方向進行了旋轉(zhuǎn),保證了特征點的方向不變性,并用臨近區(qū)域點的加權特征值生成最終的128 維特征向量。而算法是對局部區(qū)域在x,y 方向求出了harr 函數(shù)的小波相位,并用高斯加權最終生成需要的64 維特征向量,因此,算法在時間復雜度方面較SIFT 優(yōu)勢明顯。
b.實時性與精確性分析
本次實驗數(shù)據(jù)來自某型無人機實測數(shù)據(jù),基準圖分辨率為5m/pixel,速度約120km/h,航高2000m,直線平飛,相機幀率25fps,尺寸320 ×240pixel,數(shù)據(jù)記錄30min。實驗驗證如表2 所示,S2WB-RSM 算法的實時性較強(≥30Hz),所耗時間幾乎是基于SURF 特征算法的1/10;而且匹配精度較高(≤10m),精度提高近一倍,比較適合于無人機視覺導航應用。

表2 S2WB-RSM 算法的實時性和精確性參數(shù)統(tǒng)計表
2.4 算法實現(xiàn)流程
S2WB-RSM 算法主要包括SVD 特征計算模型、多尺度空間構(gòu)建、快速Hessian 矩陣檢測、SURF 特征描述子提取、基于Hessian 矩陣跡的特征點匹配以及基于RANSAC 的局部參數(shù)估計等六個過程。具體流程如圖2 所示。

圖2 S2WB-RSM 算法流程圖
a.SVD 特征計算模型
對實時圖與基準圖分別進行奇異值分解、奇異值特征向量降維、特征矢量歸一化(實現(xiàn)奇異值特征的比例不變性,把所有數(shù)據(jù)歸一到區(qū)間[-1,1])、特征矢量排列等步驟后構(gòu)成特征庫,用于SURF 特征提取與特征匹配;由于奇異值特征向量從較大維數(shù)降低到較小的維數(shù),從而大幅度減小了計算量,同時提高了匹配的可靠性。
b.多尺度空間構(gòu)建[18]
相鄰尺度差和高斯二階導的大小有關,采用9 ×9 濾波器,高斯二階導的大小定為3,其濾波器大小的1/3,即9×1/3=3。計算下一個濾波器的大小,為了保證濾波器的中心位于像素點上,要對第一層的濾波器增加偶數(shù)像素。這樣濾波器的大小就增加了6 像素,即下一層的濾波器的大小變?yōu)?5。濾波器尺寸可用size=3+5s 公式計算。其中,s 是σ 的倍數(shù)。
c.快速Hessian 矩陣檢測
對于圖像I 中一個給定的點X=(x,y),Hessian矩陣中采用近似的高斯核函數(shù),即箱式濾波器Dxx、Dxy、Dyy,9×9 的濾波器是對高斯核函數(shù)在σ=1.2 處的近似。為保持計算精度,引入高斯核函數(shù)和高斯核函數(shù)的比例因子ω,Hessian 矩陣的行列式變形為

實驗中ω 取常量0.9,對位置估計精度影響較小,且可大幅降低算法復雜度。
d.SURF 特征描述子提取
極值點的主方向計算首先以極值點為中心選取半徑為6d 的圓形區(qū)域(d 即極值點所在尺度),計算哈爾小波在x 和y 方向上的響應值,記為hx、hy。以σ=3s 為加權因子對兩個響應值高斯加權,記為Whx、Why。對Whx、Why用直方圖統(tǒng)計并將360°均分為72 組,以極值點為中心的圓均分為6 個區(qū),統(tǒng)計各60° 扇區(qū)內(nèi)的Whx、Why,記為∑Whx、∑Why,同時計算該區(qū)的梯度值,梯度值最大區(qū)域所在的方向即為該極值點的主方向,以∑Whx、∑Why反正切計算出主方向度數(shù)。
為了提取極值點描述子,需要在極值點周圍選取20 ×20 大小的區(qū)域。首先以極值點為中心,將區(qū)域的方向旋轉(zhuǎn)到極值點的方向。將這個正方形區(qū)域分成4 ×4 共16 個子區(qū)域,每個子區(qū)域里有(20/4=5)5 ×5 的像素。這里之所以選擇4 ×4 大小的子區(qū)域,在每一個子區(qū)域分別計算每個像素點在哈爾小波x 和y 方向上的響應值。
計算完所有的像素的響應值后,對所有的dx,dy,以極值點為中心進行高斯加權(σ=3.35),分別記為dx,dy,然后求和,記為∑dx,∑dy。并對dx,dy 絕對值求和,記為∑| dx|,∑| dy|,均存入特征向量并歸一化,使得描述子具有光照、尺度不變性,這樣就形成了一個四維的向量:v=對16 個子區(qū)域分別求特征向量,形成一個16 ×4=64 維的特征向量,利用該方法對一對實時圖和基準圖進行了SURF 特征點提取。利用該方法對一對實時圖和基準圖進行了SURF 特征點提取,如圖3 所示。
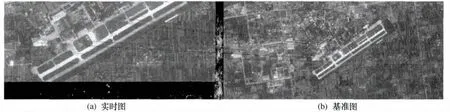
圖3 SURF 特征點提取及基于Hessian 矩陣跡的特征點匹配
e.基于Hessian 矩陣跡的特征點匹配
在Hessian 矩陣跡計算完畢之后,對Hessian 矩陣主對角線求和,即

其中,dx、dy 仍然是積分圖像想濾波器的x 和y方向上的響應值。在進行相似性度量的時候,首先判斷Hessian 矩陣的跡的符號,如果trace(i)是大于0的數(shù),令描述子等于1,反之,令描述子等于-1。
若兩個描述子的trace(i)相同,可繼續(xù)比較。反之,后面的描述子則不需要再比較。比較時需先分別計算實時圖描述子discriptorsensed和基準圖描述子discriptorref的歐氏距離,即

計算最近鄰匹配點distf和次近鄰匹配點dists,若distf/distf≤1,則二者匹配。基于Hessian 矩陣跡的特征點匹配結(jié)果如圖4 所示。

圖4 實時圖中心位置及其在基準圖上的定位結(jié)果
f.基于RANSAC 的局部參數(shù)估計
RANSAC 算法具體流程如下:a.隨機選擇N 個樣本;b.根據(jù)抽取樣本估計模型數(shù);c.用估計模型計算各匹配點對間的距離,將距離小于閾值的匹配點作為內(nèi)點;d.上述過程重復k 次,選擇一個包含內(nèi)點最多的點集,重新計算模型參數(shù)。各參數(shù)計算關系為:

其中外點概率為ε;采樣點對數(shù)為q;k 次采樣至少有1 次全部是內(nèi)點的概率為P。
用RANSAC 算法求解給定兩幅圖像間的變換參數(shù),剔除外點后,符合匹配要求的內(nèi)點共46 對,圖3 和圖4 的實驗結(jié)果顯示了SURF 出格點提出后的內(nèi)點配對結(jié)果、實時圖基于RANSAC 估計參數(shù)的變換結(jié)果以及實時圖中心在基準圖上的定位結(jié)果。
3 實驗結(jié)果及討論
為驗證S2WB-RSM 算法在無人機實際工作環(huán)境下有效性,選取了SIFT 特征與使用的SVD-SURF特征做實驗對比,分別就圖像配準的精確性、魯棒性和實時性進行驗證。由可見光圖像數(shù)據(jù)驗證S2WBRSM 算法的精確性,由SAR 圖像數(shù)據(jù)驗證S2WBRSM 算法的魯棒性,最后,通過并行計算實驗來驗證S2WB-RSM 算法的實時性。
實驗數(shù)據(jù):無人機的實時圖來自某次飛行試驗記錄(uvs110722-003.AVI,jingxiangpipei-16.mat)。uvs110722-003.AVI 視頻時長701s,圖像分辨率為640 ×480,幀率為30fps。對于光電平臺記錄數(shù)據(jù)共53851 條記錄(包括無人機的經(jīng)度、緯度、高度、速度、俯仰角、偏航角、滾轉(zhuǎn)角等字段)。數(shù)據(jù)顯示起始幀大地坐標為(33.65309110°,109.1199911°)。實驗截取1:30~2:38 之間視頻數(shù)據(jù),對應平臺記錄數(shù)據(jù)即6914~12138 條,共5224 條。基準圖來自預先制備的衛(wèi)星正射影像圖,分辨率為5m/pixel。實驗從中連續(xù)抽取800 幀圖像序列作為實時圖。實驗環(huán)境:PC 機,奔騰2.0GCPU,1G 內(nèi)存,Windows XP操作系統(tǒng),VC++開發(fā)平臺。無人機SAR 圖像的基準圖和實時圖均來自美國桑迪亞國家重點實驗室公布的網(wǎng)站數(shù)據(jù)。
實時圖尺寸為320 ×240 像素,為序列圖像。基準圖大小為640 ×480 像素,為分塊圖像,采用圖號調(diào)用方式。對源圖像統(tǒng)一采用Daubechies 小波基進行圖像壓縮,以提高景象匹配的實時性[19]。
a.可見光實時圖序列適配區(qū)連續(xù)景象匹配
基于可見光實時圖序列的連續(xù)景象匹配實驗結(jié)果數(shù)據(jù)如表3 所示,實驗結(jié)果曲線如圖5 與圖6所示。
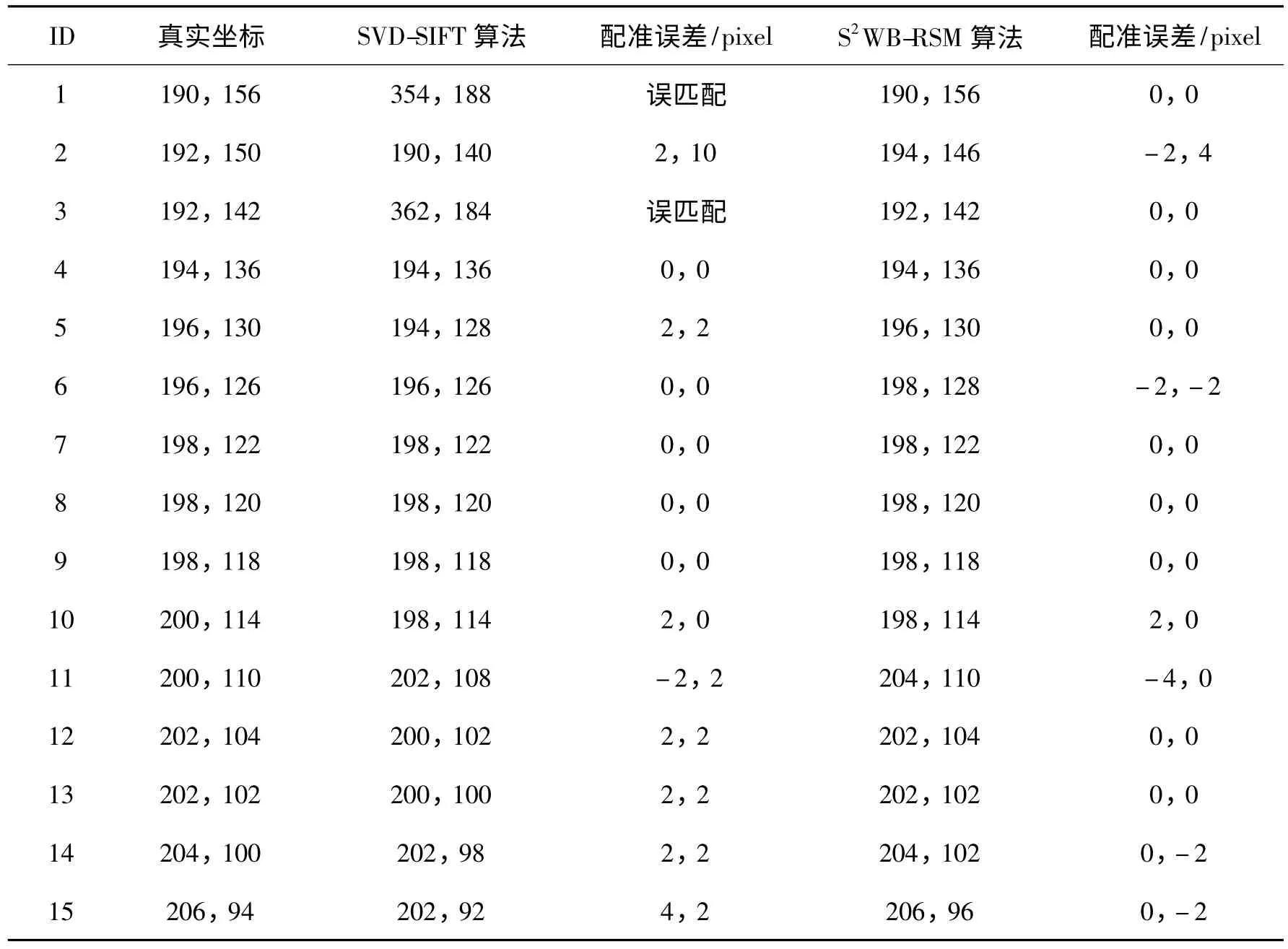
表3 基于可見光實時圖序列的連續(xù)景象匹配對比實驗數(shù)據(jù)
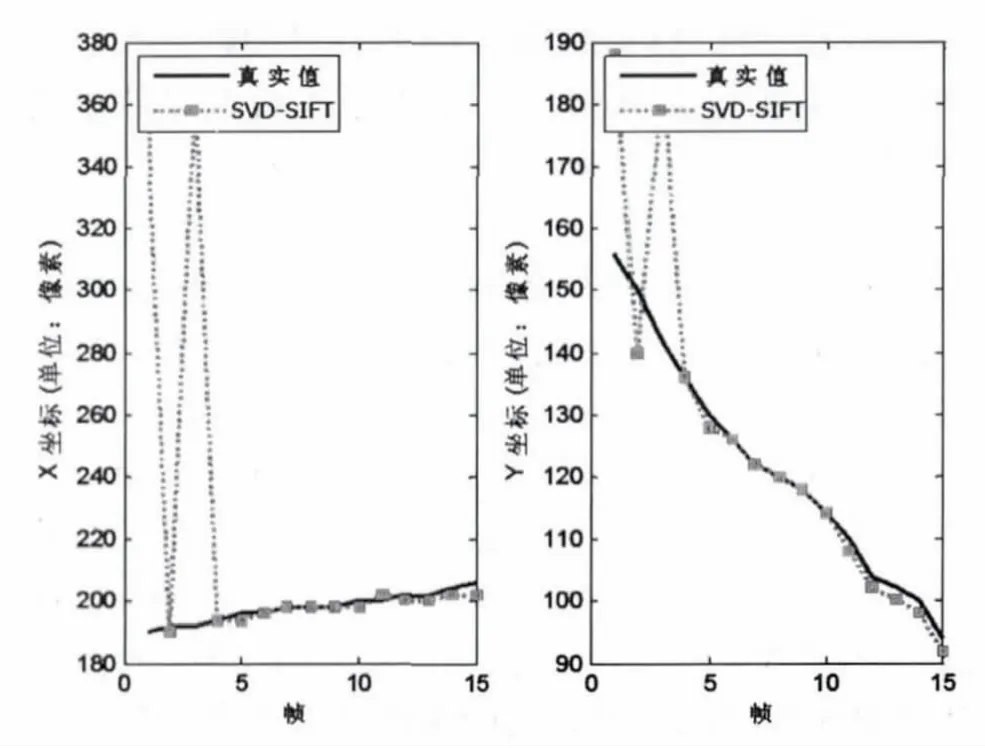
圖5 基于SVD-SIFT 特征的可見光實時圖序列配準結(jié)果
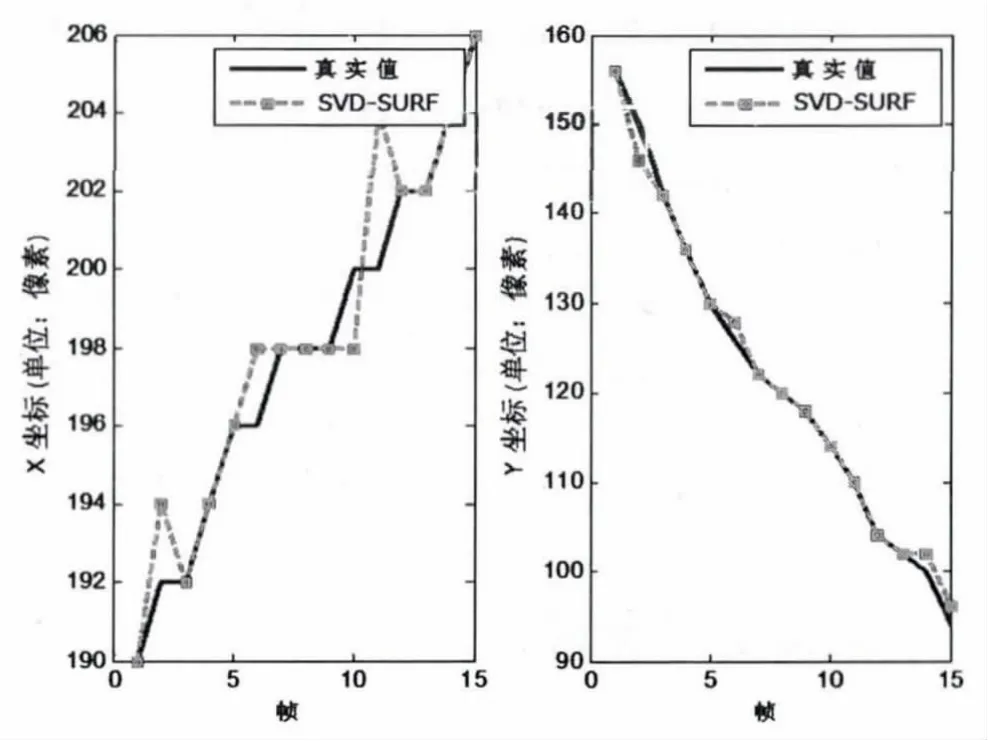
圖6 基于SVD-SURF 特征的可見光實時圖序列配準結(jié)果
無人機平臺景象匹配在實際工作中通常是以實時圖序列為配準對象,其配準精度直接反應了匹配算法能否滿足實際要求。由于可見光實時圖與基準圖差異較大,從表3 可以看出基于SVD-SIFT 特征的匹配算法配準精度較低,共有73.3%的配準點滿足無人機導航任務要求(配準誤差≤2 像素);基于SVD-SURF 特征的S2WB-RSM 算法則有86.6%的配準點滿足無人機任務需求的實際要求(配準誤差≤2 像素),在匹配精確性方面略顯優(yōu)勢。
b.SAR 實時圖序列適配區(qū)連續(xù)景象匹配
本實驗將SAR 圖像序列用于連續(xù)景象匹配,其實驗結(jié)果數(shù)據(jù)如表4 所示,實驗結(jié)果曲線如圖7 與圖8 所示。雖然SAR 成像受氣象條件的影響較小,實時圖與基準圖比較相似,但是,由于SAR 圖像信噪比較低,加之分辨率較低(實驗數(shù)據(jù)分辨率為0.5米/像素),特征提取比較困難,從而導致配準誤差比可見光的大一些。表4 統(tǒng)計顯示,SAR 圖像序列的基于SVD-SIFT 特征的算法與基于SVD-SURF 的S2WB-RSM 算法配準最大誤差分別為6 個像素和4個像素,實驗結(jié)果表明,對于低信噪比圖像,S2WBRSM 算法的魯棒性較好。
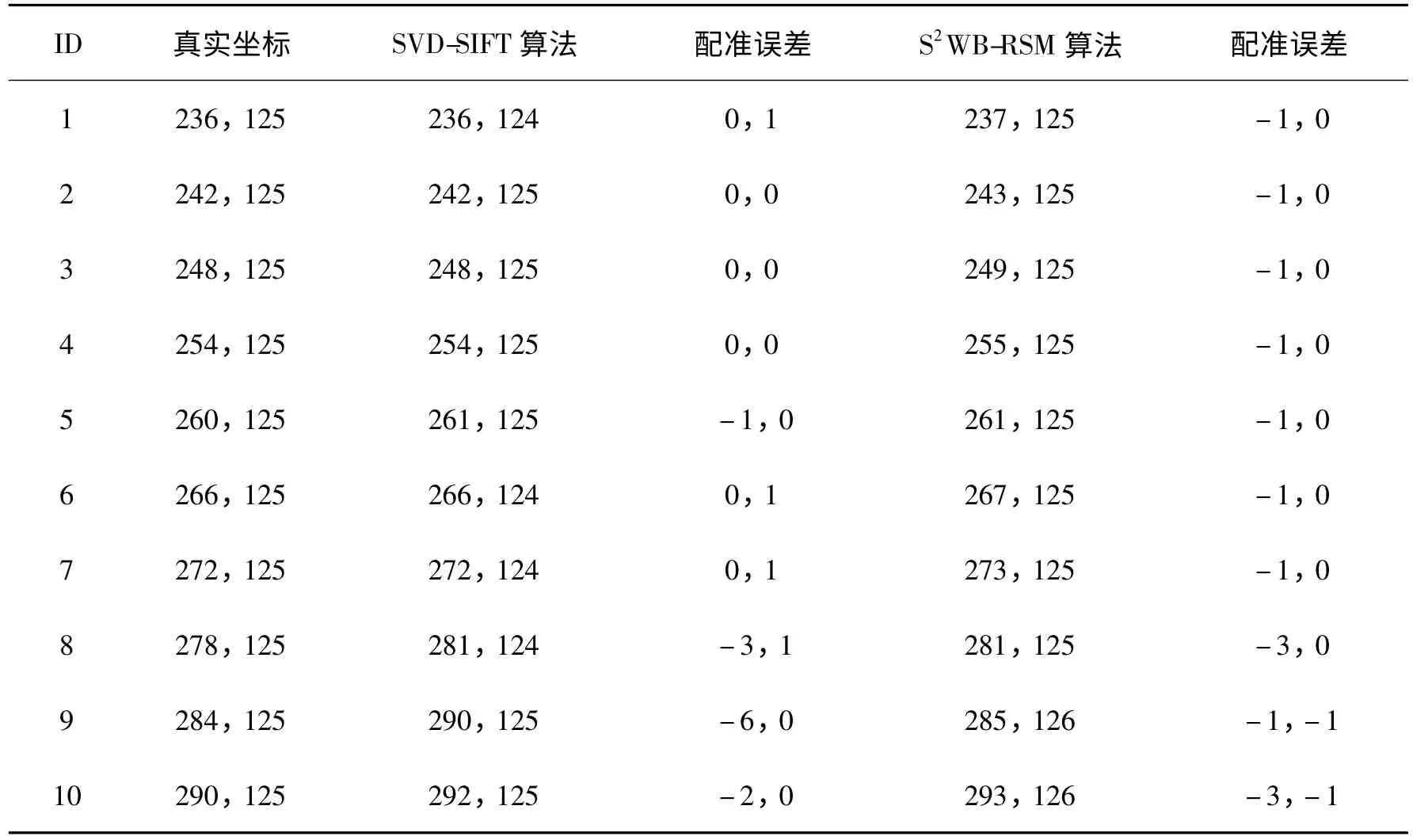
表4 基于SAR 實時圖序列的連續(xù)景象匹配對比實驗數(shù)據(jù)
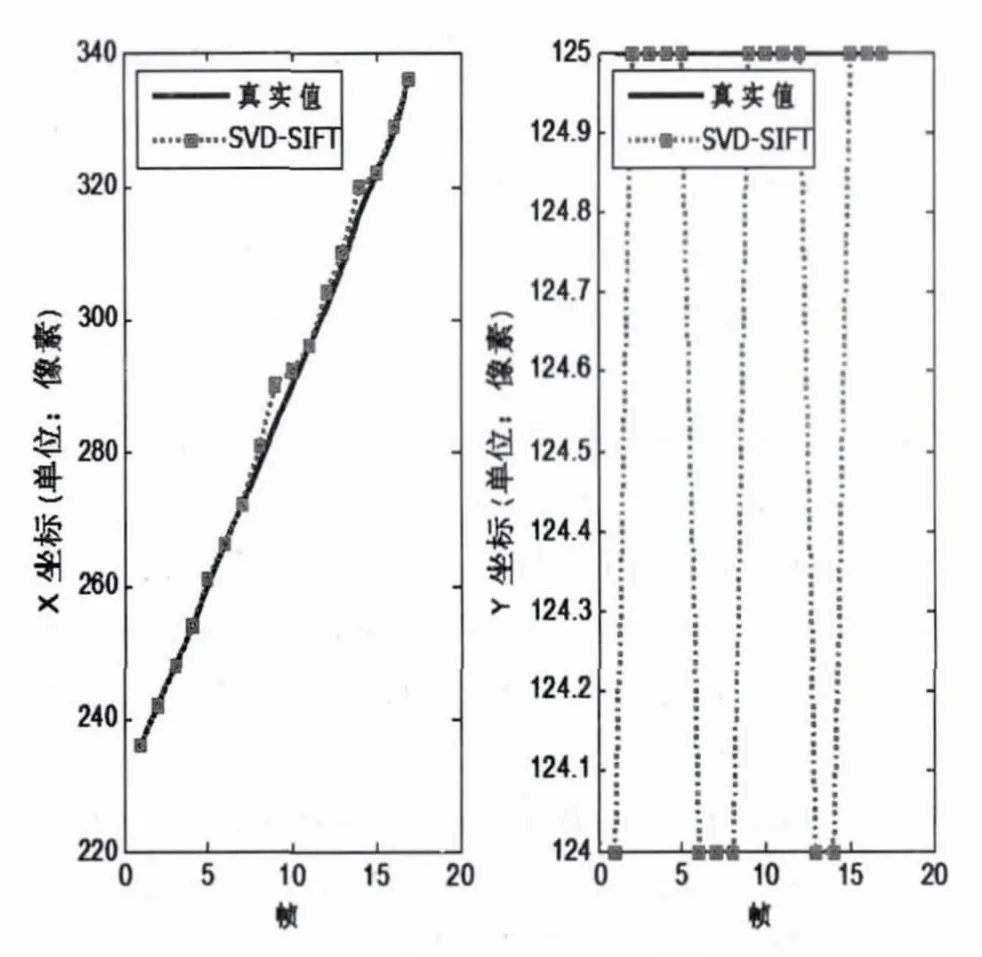
圖7 基于SVD-SIFT 特征的SAR 實時圖序列配準結(jié)果
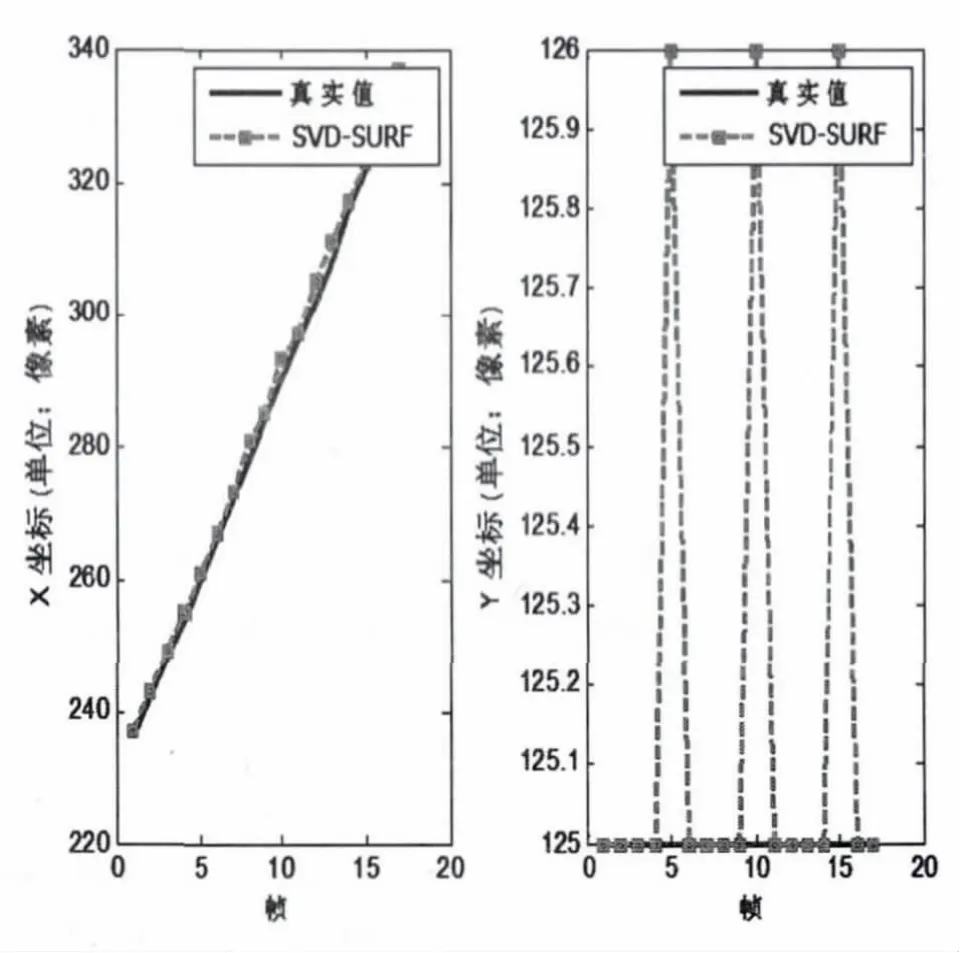
圖8 基于SVD-SURF 特征的SAR 實時圖序列配準結(jié)果
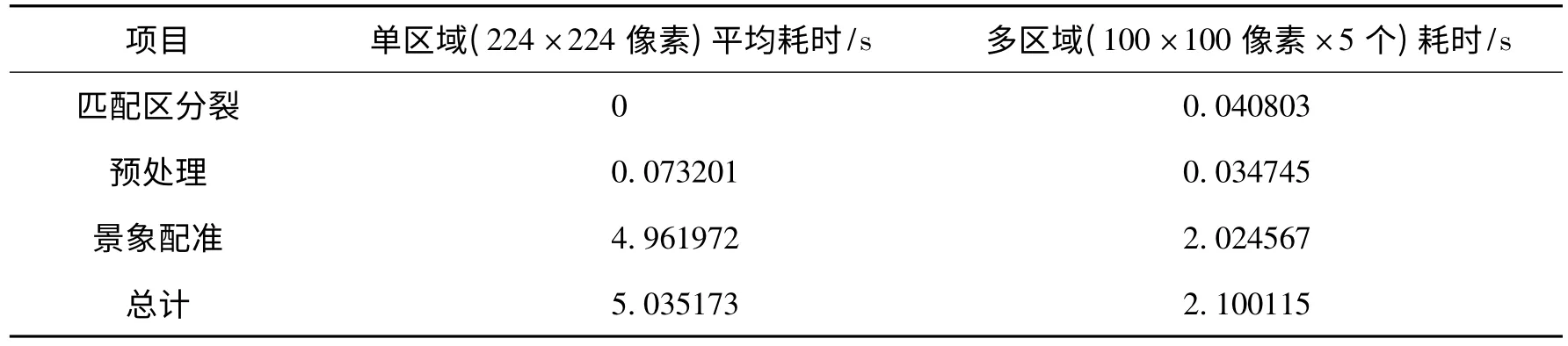
表5 SVD-SIFT 算法一次小波分解耗時統(tǒng)計
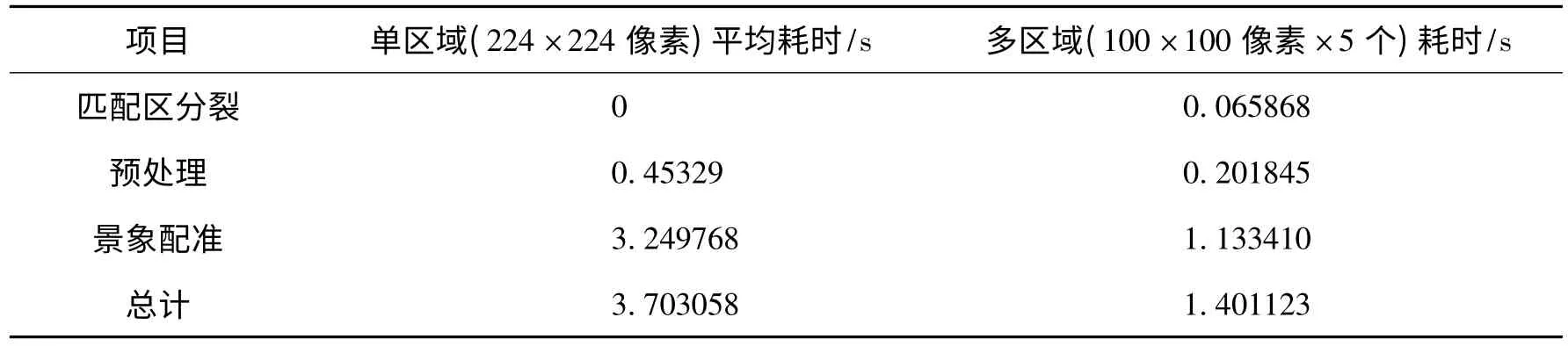
表6 S2WB-RSM 算法一次小波分解耗時統(tǒng)計
采用小波圖像分解時,兩種快速景象匹配算法耗時如表5 與表6 所示,實驗統(tǒng)計數(shù)據(jù)表明SVDSURF 算法比SVD-SIFT 算法在實時性能方面分別提高26.5% 和33.3%。因此,在實時性方面,S2WB-RSM 算法可并行計算且實時性明顯高于SVD-SIFT 算法。
綜上所述,與SVD-SIFT 算法相比,S2WB-RSM算法計算量較小,加之SVD 特征向量穩(wěn)定性優(yōu)勢,在低信噪比圖像配準方面誤差更小。而且,在多區(qū)域景象匹配并行計算方面,S2WB-RSM 算法比SVDSIFT 算法更具有實時性。因此,S2WB-RSM 算法性能更符合無人機系統(tǒng)對景象匹配導航算法的實時性、精確性和魯棒性要求。
4 結(jié)束語
面向無人機視覺導航,基于圖像奇異值特征的良好區(qū)分性、穩(wěn)定性和獨立性,提出了適合無人機平臺的S2WB-RSM 算法,通過選取SIFT 特征與SVDSURF 特征做實驗對比,分別就圖像配準的精確性、魯棒性和實時性進行測試,充分顯示了奇異值特征的穩(wěn)定性優(yōu)勢以及SURF 特征的快速魯棒優(yōu)勢,同時,驗證了S2WB-RSM 算法能夠適應航空序列圖像的一定的旋轉(zhuǎn)、尺度變換及噪聲干擾,具有較強的實時性、精確性和魯棒性,該算法為下一階段無人機載嵌入式視覺導航系統(tǒng)的研制奠定了重要基礎。
[1]M.Brown,D.G.Lowe.Automatic panoramic image stitching using invariant features [J].International Journal of Computer Vision,2007,74(1) :59-73.
[2]K.Mikolajczyk,C.Schmid.A performance evaluation of local descriptors [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(10) :1615-1630.
[3]D.G.Lowe.Distinctive image features from scale-invariant keypoints [J].International Journal of Computer Vision.2004,60(2) :91-110.
[4]K.Mikolajczyk,T.Tuytelaars,C.Schmid,et.al.A comparison of affine region detectors[J].International Journal of Computer Vision,2005,65(1) :43-72.
[5]V.Chandrasekhar,M.Makar,G.Takacs,et.al.Survey of SIFT compression schemes[C].Proceedings of International Conference on Pattern Recognition (ICPR),Istanbul,Turkey,August 2010.
[6]Brown M,Lowe D G.Automatic panoramic image stitching using invariant features [J].International Journal of Computer Vision,2007,74(1) :59-73.
[7]Bay H,Ess A,Tuytelaars T,et al.Speededup robust features (SURF) [J].Computer Vision and Image Understanding,2008,7(3) :346-359.
[8]Oconaire C,Blighe M,Oconno N.Sense Cam image localisation using hierarchical SURF trees[J].Springer Verlag Berlin Heidelberg,2009,9(1) :15-26.
[9]Gossow D,Pellenz J,Paulus D.Danger sign detection using color histograms and SURF matching [C].IEEE International Workshop on Safety,Security and Rescue Robotics.Tohoku,Japanese:IEEE,2008,3 (1) :13-18.
[10]Zhang Zhanyu,Huang Yalou,Li Chao,et al.Monocular vision simultaneous localization and mapping using SURF[C].World Congress on Intelligent Control and Automation.Chongqing,China,2008,5 (11) :1651-1656.
[11]Hong Z.Algebraic feature extraction of image for recognition [J].Pattern Recognition,1991,24(3) :211-219.
[12]周德龍.人臉識別技術研究[D].西安:西北工業(yè)大學,2000.
[13]甘俊英,張有為.一種基于奇異值特征的神經(jīng)網(wǎng)絡人臉識別新途徑[J].電子學報,2004,32(1) :170-173.
[14]KlemaV C,Laub A J.Singular value decomposition:its computation and some applications[J].IEEE Trans-actions on Automatic Control,1980,25(2) :164-176.
[15]Gan junying,Zhang Youwei.A New Approach for Face Recognition Based on Singular Value Features and Neural Networks[J].Acta Electronica Sinica,2004,32(1) :170-173.
[16]顧曉波.基于支持向量機的彩色圖像的人眼定位及人臉檢測[D].上海:上海師范大學,2007.
[17]李曉東,費樹岷,張濤.基于奇異值特征和支持向量機的人臉識別[J].東南大學學報(自然科學版),2008,38(6) :981-985.
[18]徐秀云.基于特征點的景象匹配技術研究[D].南京:南京理工大學,2009.
[19]李耀軍,潘泉等.基于空間關系幾何約束的無人機景象匹配導航[J].計算機應用研究,2010,27(10) :3822-3825,3846.
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
世界科學技術-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55