玉米穴播穴灌機(jī)水分傳感器驅(qū)動(dòng)機(jī)構(gòu)設(shè)計(jì)
2013-10-09 11:52:10楊術(shù)明李茂強(qiáng)楊樹(shù)川馬伏龍
楊術(shù)明,李茂強(qiáng),楊樹(shù)川,馬伏龍
(寧夏大學(xué)機(jī)械工程學(xué)院,寧夏銀川 750021)
春旱在中國(guó)非常普遍,尤其是水資源匱乏的西北地區(qū),嚴(yán)重影響農(nóng)作物的適時(shí)播種,穴播穴灌是在穴播的同時(shí)進(jìn)行穴灌,可在一定程度上減輕春旱對(duì)適時(shí)播種的威脅.基于土壤水分含量的變量施水措施則可根據(jù)土壤水分含量大小進(jìn)行按需施水,在抗旱的同時(shí)進(jìn)一步節(jié)水,從而提高水分的利用效率.在穴播穴灌機(jī)上配置變量施水控制系統(tǒng),在工作過(guò)程中根據(jù)土壤水分含量大小有效地調(diào)控施水量,但如何在工作時(shí)實(shí)時(shí)采集土壤水分含量信號(hào)并提供給控制系統(tǒng)成為亟待解決的問(wèn)題.本文旨在設(shè)計(jì)一種水分傳感器驅(qū)動(dòng)機(jī)構(gòu),滿足玉米穴播穴灌機(jī)對(duì)水分傳感器在工作過(guò)程中的土壤測(cè)量深度和零速要求,在機(jī)具工作的同時(shí)能夠可靠地驅(qū)動(dòng)水分傳感器完成入土和出土動(dòng)作,有效解決穴播穴灌機(jī)工作時(shí)土壤水分含量信號(hào)難以實(shí)時(shí)采集的問(wèn)題.
1 水分傳感器驅(qū)動(dòng)機(jī)構(gòu)的設(shè)計(jì)
1.1 玉米穴播穴灌機(jī)的結(jié)構(gòu)
玉米穴播穴灌機(jī)是一種可根據(jù)田間的土壤水分含量自動(dòng)改變施水量的精密穴施水穴播種機(jī),主要由行走輪、開(kāi)溝器、排種機(jī)構(gòu)、施水機(jī)構(gòu)、覆土機(jī)構(gòu)、覆膜機(jī)構(gòu)等組成,其三維模型如圖1所示.
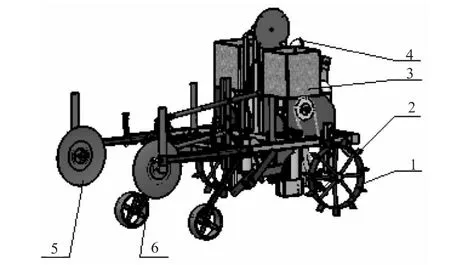
圖1 玉米穴播穴灌機(jī)Fig.1 Corn irrigating hill-seeder
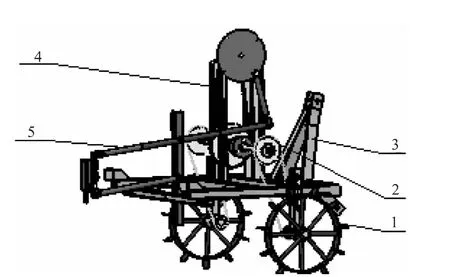
圖2 水分傳感器驅(qū)動(dòng)機(jī)構(gòu)Fig.2 Soil moisture sensor drive mechanism
1.2 水分傳感器驅(qū)動(dòng)機(jī)構(gòu)的設(shè)計(jì)
水分傳感器驅(qū)動(dòng)機(jī)構(gòu)驅(qū)動(dòng)水分傳感器周期性測(cè)量土壤水分含量,主要由地輪、傳動(dòng)系統(tǒng)、機(jī)架、支架、六桿機(jī)構(gòu)等組成.水分傳感器驅(qū)動(dòng)機(jī)構(gòu)通過(guò)螺栓固定在玉米穴播穴灌機(jī)機(jī)架上,傳動(dòng)鏈條將來(lái)自地輪的動(dòng)力傳至驅(qū)動(dòng)盤(pán),驅(qū)動(dòng)盤(pán)將動(dòng)力傳至六桿機(jī)構(gòu),六桿機(jī)構(gòu)驅(qū)動(dòng)水分傳感器周期性與土壤接觸,傳感器將測(cè)得的土壤水分含量信號(hào)傳至變量施水控制系統(tǒng),其三維模型如圖2所示.
2 水分傳感器針尖的運(yùn)動(dòng)分析
水分傳感器的測(cè)量電極由3根鋼針組成,為了保證土壤水分含量測(cè)試的準(zhǔn)確性,測(cè)量時(shí)需要傳感器針尖具有一定的入土深度,同時(shí)也應(yīng)滿足零速要求,即在鋼針入土后,在水平方向中存在絕對(duì)速度為零的時(shí)刻,為滿足以上要求,需對(duì)其進(jìn)行運(yùn)動(dòng)分析.
2.1 六桿機(jī)構(gòu)的縱向位移分析
水分傳感器安裝于六桿機(jī)構(gòu)的平行四邊形機(jī)構(gòu)上,安裝位置如圖3所示.圖3中,驅(qū)動(dòng)盤(pán)由鏈傳動(dòng)機(jī)構(gòu)驅(qū)動(dòng),通過(guò)六桿機(jī)構(gòu)中的平行四邊形機(jī)構(gòu)往復(fù)運(yùn)動(dòng)實(shí)現(xiàn)周期性測(cè)量土壤水分含量.
玉米穴播穴灌機(jī)工作時(shí)前進(jìn)速度為1 339mm/s,經(jīng)計(jì)算驅(qū)動(dòng)盤(pán)的轉(zhuǎn)速為150.23r/min.以三維模型為基礎(chǔ),利用Solidworks motion對(duì)六桿機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)學(xué)分析,水分傳感器針尖相對(duì)于支架的相對(duì)位移如圖4所示.
由圖4可知,傳感器針尖相對(duì)于支架的相對(duì)位移為598~780mm,該位移滿足玉米穴播穴灌機(jī)工作狀態(tài)下傳感器測(cè)量土壤水分含量的要求.
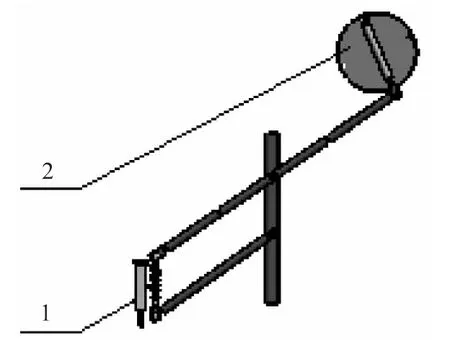
圖3 六桿機(jī)構(gòu)Fig.3 Six-bar linkage
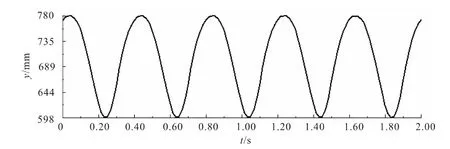
圖4 傳感器針尖相對(duì)于支架的相對(duì)位移Fig.4 Relative displacement y of Soil Moisture sensor pinpoint
2.2 水分傳感器針尖的零速分析
為減小水分傳感器與土壤間摩擦阻力,有效保證水分傳感器裝置的使用壽命,水分傳感器針尖的水平方向速度應(yīng)滿足零速要求,即要求傳感器針尖在測(cè)量時(shí)絕對(duì)水平速度為零.
2.2.1 傳感器針尖水平速度數(shù)學(xué)模型的建立
為對(duì)傳感器針尖在運(yùn)動(dòng)過(guò)程中水平速度做出定量分析,建立其數(shù)學(xué)模型.在六桿機(jī)構(gòu)的運(yùn)動(dòng)簡(jiǎn)圖上建立直角坐標(biāo)系,如圖5所示.從圖5可看出,各桿件構(gòu)成了由桿矢量組成的2個(gè)封閉矢量多邊形,即ABCDA和DEFGD.
對(duì)于封閉多邊形ABCDA,建立封閉矢量方程,得式(1).其各構(gòu)件的長(zhǎng)度和原動(dòng)件的運(yùn)動(dòng)規(guī)律,即θ1為已知,而θ4=故此矢量方程只有方位角θ2及θ32個(gè)未知量,方程可解.

式中分別為桿AB,BC,DC及AD的桿矢量;θ1,θ2,θ3,θ4分別為桿AB,BC,DC及AD與x軸在逆時(shí)針?lè)较虻膴A角.
對(duì)于封閉多邊形DEFGD,其各構(gòu)件的長(zhǎng)度和原動(dòng)件的運(yùn)動(dòng)規(guī)律,即θ5為已知,而θ8=,故此矢量方程可求得2個(gè)未知方位角θ6及θ7.在DEFGD這個(gè)封閉矢量多邊形中,其矢量之和等于零,即
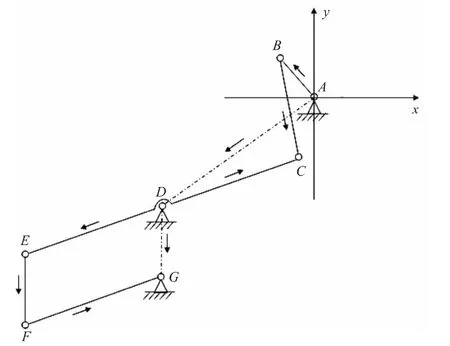
圖5 六桿機(jī)構(gòu)運(yùn)動(dòng)簡(jiǎn)圖Fig.5 Kinematic sketch of six-bar linkage

式中分別為桿DE,EF,GF及DG的桿矢量;θ5,θ6,θ7,θ8分別為桿DE,EF,GF及DG與x軸在逆時(shí)針?lè)较虻膴A角.
設(shè)連桿EF上任一點(diǎn)的位置矢量為,其中的模為207.9mm的模為41.48mm,M點(diǎn)在坐標(biāo)系A(chǔ)xy中的絕對(duì)位置矢量為則

即

求解方程(1),(2),(4)得式(5)和式(6).


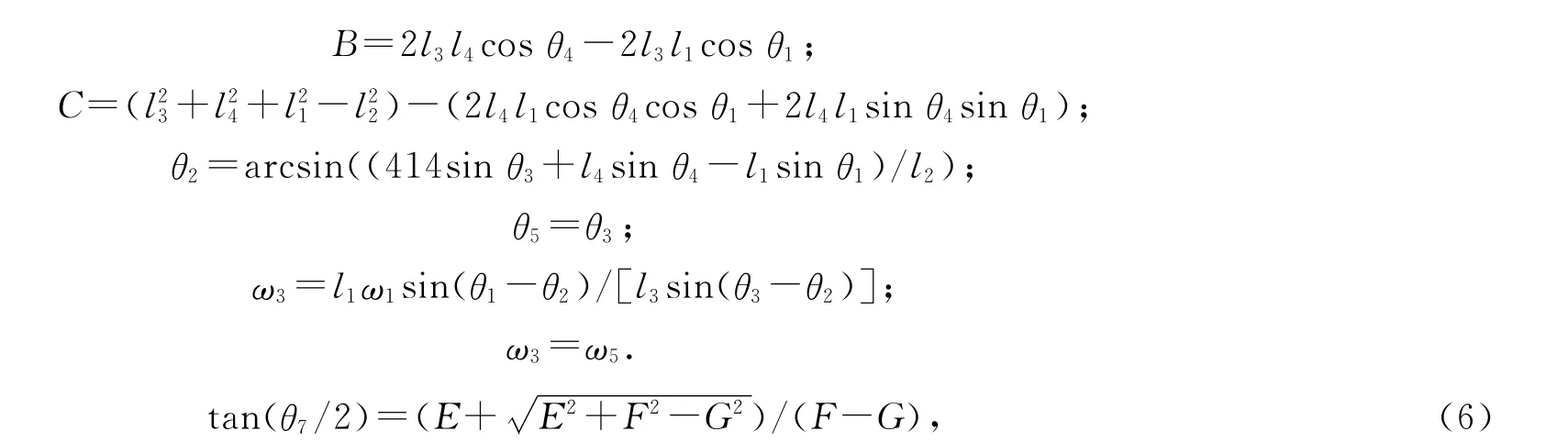

式(4)對(duì)時(shí)間t求一次導(dǎo)數(shù),并經(jīng)變換整理可得v→矢量表達(dá)式,即

其中式(7)中實(shí)部為沒(méi)考慮機(jī)具平動(dòng)時(shí)的針尖水平速度,虛部為沒(méi)考慮機(jī)具平動(dòng)時(shí)的針尖縱向速度.因此,考慮機(jī)具平動(dòng)時(shí)的傳感器針尖的水平速度為

2.2.2 零速分析
根據(jù)零速要求,令式(8)所示的速度為零,通過(guò)Matlab軟件可得水平速度為零時(shí)的轉(zhuǎn)速與時(shí)間的關(guān)系圖,如圖6所示.由圖6可知,存在使傳感器針尖水平速度為零的轉(zhuǎn)速,即存在使傳感器針尖滿足零速要求的轉(zhuǎn)速,而前期驅(qū)動(dòng)盤(pán)設(shè)計(jì)轉(zhuǎn)速為150.23r/min,不能滿足零速要求.
2.2.3 零速要求的最小轉(zhuǎn)速優(yōu)化
前期驅(qū)動(dòng)盤(pán)設(shè)計(jì)轉(zhuǎn)速150.23r/min因過(guò)小而不滿足零速要求,而過(guò)高的驅(qū)動(dòng)盤(pán)轉(zhuǎn)速會(huì)導(dǎo)致嚴(yán)重的振動(dòng)問(wèn)題,因此最優(yōu)的轉(zhuǎn)速應(yīng)該是滿足零速要求的最小轉(zhuǎn)速值,即滿足式(8)所示水平速度等于零的最小轉(zhuǎn)速值.為確定滿足零速要求下的最小轉(zhuǎn)速值,建立優(yōu)化問(wèn)題的數(shù)學(xué)模型.目標(biāo)函數(shù)

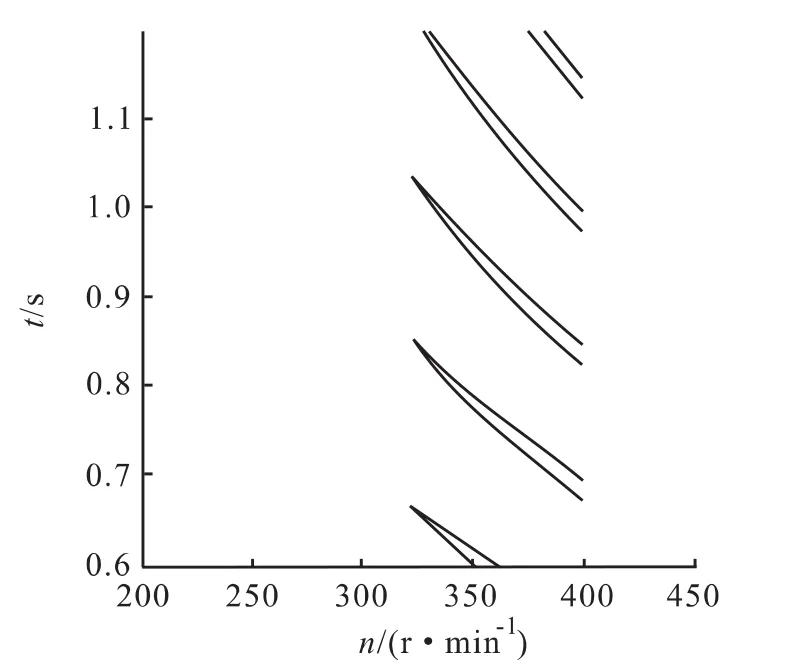
圖6 速度為零時(shí)的轉(zhuǎn)速時(shí)間關(guān)系Fig.6 Zero-speed relation schema between rotation rate and time
式中n,ω分別為驅(qū)動(dòng)盤(pán)的轉(zhuǎn)速和角速度.
設(shè)計(jì)變量X:

約束條件:

對(duì)數(shù)學(xué)模型進(jìn)行優(yōu)化求解可知,當(dāng)水分傳感器針尖的最小水平方向速度為零時(shí),驅(qū)動(dòng)盤(pán)的轉(zhuǎn)速為321r/min,即滿足零速要求的最小轉(zhuǎn)速為321r/min.
利用Matlab軟件生成水分傳感器針尖的水平速度圖像,如圖7所示,其中圖7a為優(yōu)化前的水平速度圖像,圖7b為優(yōu)化后的水平速度圖像.
對(duì)比優(yōu)化前后的水平速度圖像發(fā)現(xiàn),驅(qū)動(dòng)盤(pán)的轉(zhuǎn)速為321r/min時(shí)水平速度的最小值明顯減小,且滿足零速要求.
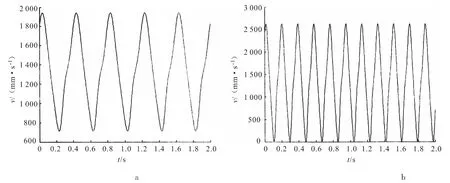
圖7 傳感器針尖平動(dòng)速度的圖像Fig.7 Horizontal velocity image of Soil Moisture sensor pinpoint
由Solidworks motion運(yùn)動(dòng)學(xué)分析得到水分傳感器針尖軌跡,如圖8所示,其中圖8a為優(yōu)化前的傳感器針尖運(yùn)動(dòng)軌跡,圖8b為優(yōu)化后的傳感器針尖運(yùn)動(dòng)軌跡.
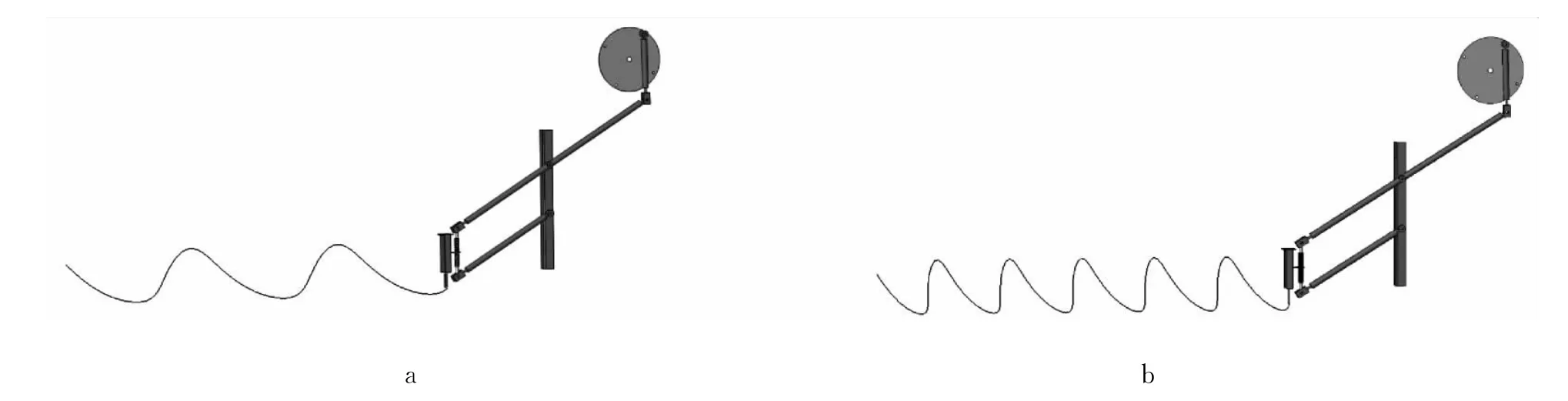
圖8 傳感器針尖的運(yùn)動(dòng)軌跡Fig.8 Motion trail of Soil Moisture sensor pinpoint
對(duì)比優(yōu)化前后傳感器針尖的運(yùn)動(dòng)軌跡發(fā)現(xiàn),水分傳感器針尖從土壤底端離開(kāi)土壤表層時(shí)傳感器針尖軌跡切線方向垂直向上,說(shuō)明其在水平方向上速度為零,滿足了零速要求.
3 結(jié)論
理論分析和仿真結(jié)果表明,優(yōu)化后的水分傳感器驅(qū)動(dòng)機(jī)構(gòu),既能滿足土壤水分含量測(cè)試的深度要求,又能滿足水分傳感器針尖零速要求.研究結(jié)果為玉米穴播穴灌機(jī)水分傳感器驅(qū)動(dòng)機(jī)構(gòu)結(jié)構(gòu)及運(yùn)動(dòng)參數(shù)的設(shè)計(jì)提供了理論依據(jù).
[1] 楊青,龐樹(shù)杰,李勇軍.基于GPS和GIS的變量施水控制系統(tǒng)設(shè)計(jì)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2006,37(12):126-129.YANG Qing,PANG Shujie,LI Yongjun.Design of variable rate control system of water application based on GPS and GIS[J].Transactions of the Chinese Society for Agricultural Machinery,2006,37(12):126-129.
[2] 楊術(shù)明,楊樹(shù)川,熊偉.土壤水分測(cè)量?jī)x的數(shù)字濾波設(shè)計(jì)與實(shí)現(xiàn)[J].河北大學(xué)學(xué)報(bào):自然科學(xué)版,2010,30(3):319-322.YANG Shuming,YANG Shuchuan,XIONG Wei.Design and realization of digital filter for soil moisture meter[J].Journal of Hebei University:Natural Science Edition,2010,30(3):319-322.
[3] 楊術(shù)明,楊青,楊成海,等.變量穴施水穴播機(jī)設(shè)計(jì)[J].農(nóng)業(yè)機(jī)械學(xué)報(bào),2008,39(3):46-48.YANG Shuming,YANG Qing,YANG Chenghai,et al.Design of a variable rate irrigating hill-seeder[J].Transactions of the Chinese Society for Agricultural Machinery,2008,39(3):46-48.
[4] 張志娟,水小平.柔性多體系統(tǒng)碰撞動(dòng)力學(xué)研究進(jìn)展[J].河北大學(xué)學(xué)報(bào):自然科學(xué)版,2004,24(2):191-194.ZHANG Zhijuan,SHUI Xiaoping.Review on the impact dynamic research of flexible multibody systems[J].Journal of Hebei University:Natural Science Edition,2004,24(2):191-194.
[5] 田曉,佘航,方立德.基于MATLAB的導(dǎo)軌直線度數(shù)據(jù)處理以及界面設(shè)計(jì)[J].河北大學(xué)學(xué)報(bào):自然科學(xué)版,2011,31(1):98-102.TIAN Xiao,SHE Hang,F(xiàn)ANG Lide.Design of data processing and graphic interface for straightness tolerance based on MATLAB[J].Journal of Hebei University:Natural Science Edition,2011,31(1):98-102.
[6] 李濱城,徐超.機(jī)械原理Matlab輔助分析[M].北京:化學(xué)工業(yè)出版社,2011.
[7] 徐春雷,潘宏俠,李冉,等.基于Matlab的平面連桿機(jī)構(gòu)仿真軟件的研究[J].機(jī)械設(shè)計(jì)與制造,2012,12:94-96.XU Chunlei,PAN Hongxia,LI Ran,et al.Research of simulation software of planar linkage based on Matlab[J].Machinery Design &Manufacture,2012,12:94-96.
[8] 陳超祥,胡其登.Solid Works Motion運(yùn)動(dòng)仿真教程[M].北京:機(jī)械工業(yè)出版社,2012.
[9] 孫桓,陳作模,葛文杰.機(jī)械原理[M].北京:高等教育出版社,2006.
[10] 周凌.基于Matlab的四桿機(jī)構(gòu)的運(yùn)動(dòng)學(xué)動(dòng)力學(xué)仿真[J].佳木斯教育學(xué)院學(xué)報(bào),2011,109(11):147-149.ZHOU Ling.Based on the Matlab four-bar mechanism of the kinematics dynamics simulation[J].Journal of Jiamusi Education Institute,2011,109(11):147-149.
[11] 余海寧.鉸鏈四桿機(jī)構(gòu)的計(jì)算機(jī)輔助設(shè)計(jì)及運(yùn)動(dòng)仿真[J].現(xiàn)代機(jī)械,2007,11:33-34.YU Haining.Computer aided design and kinematics simulation for four bar linkage mechanism[J].Modern Machinery,2007,11:33-34.
[12] 雷經(jīng)發(fā),扈靜,魏濤.基于MATLAB的平面四桿機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析[J].機(jī)械工程,2009,9:76-78.LEI Jingfa,HU Jing,WEI Tao.Kinematic analysis of the planar four bar linkage mechanism based on MATLAB[J].Journal of Mechanical Engineer,2009,9:76-78.
