新型模糊PID控制在UUV操縱上的研究
2013-09-21 05:34:16周晨石巖峰鄭晶晶
船電技術(shù) 2013年11期
周晨,石巖峰,鄭晶晶
(總裝備部車船裝備論證試驗(yàn)研究所,南京 210028)
0 引言
在水下航行器的研究中,其操縱控制是較為活躍的方面。水下航行器的操縱控制指航行器借助其操縱裝置來(lái)改變或保持其運(yùn)動(dòng)速度、位置和姿態(tài)的性能。由于其簡(jiǎn)單性及可靠性,PID控制在工程應(yīng)用中是較為常見的控制算法。在傳統(tǒng)的水中航行器的自動(dòng)舵中,PID控制的應(yīng)用也較為廣泛。1961年,Kerkenberg將 PID控制應(yīng)用于108型潛艇,這一工作對(duì)后面的研究具有很重要的參考價(jià)值。從此以后,很多學(xué)者開始研究 PID及改進(jìn)的PID控制在水下航行器操縱控制中的應(yīng)用[1]。隨著水下航行范圍的擴(kuò)大,水下航行器的運(yùn)動(dòng)越來(lái)越復(fù)雜,對(duì)其操縱控制的要求也越來(lái)越高。單純的PID控制已經(jīng)不能滿足對(duì)水下航行器的操縱要求了。本文將模糊控制與PID控制相結(jié)合,吸取了兩種控制方法的優(yōu)點(diǎn),以達(dá)到對(duì)水下航行器操縱的滿意的控制效果。
1 水下航行器的運(yùn)動(dòng)模型
1.1 坐標(biāo)系
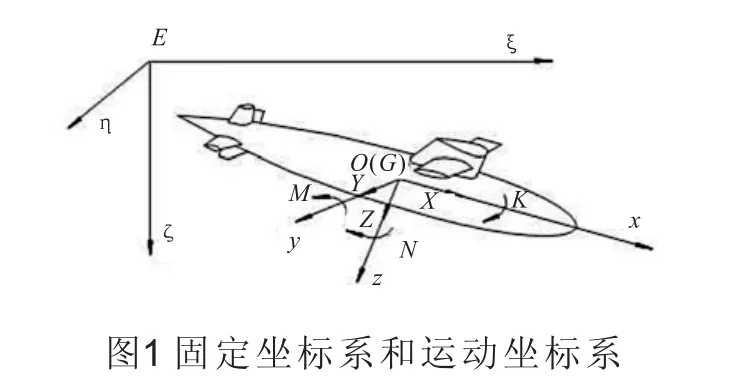
在水下航行器運(yùn)動(dòng)的研究中,一般有兩種坐標(biāo)系,一種是定系,固聯(lián)于地球上;一種是動(dòng)系,固聯(lián)于航行器上。如圖1所示,定系E-ξηζ是右手正交坐標(biāo)系,原點(diǎn)E是固定于地球上的某一點(diǎn),Eξ軸位于水平面,通常以潛艇的主航向?yàn)檎颍珽η軸位于Eξ軸所在的水平面,按右手法則將Eξ軸順時(shí)針旋轉(zhuǎn) 90°即是,Eζ軸垂直于ξEη坐標(biāo)平面,指向地心為正;動(dòng)系O-XYZ也是右手正交坐標(biāo)系,原點(diǎn)O一般選在航行器的重心處,OX軸指向艇首,OY軸指向右舷,OZ軸指向龍骨。航行器的重心決定于其質(zhì)量分布,浮心決定于其浸沒于水中的外形,從理論上講重心與浮心是重合的,位于動(dòng)系的原點(diǎn)處。
1.2 數(shù)學(xué)模型
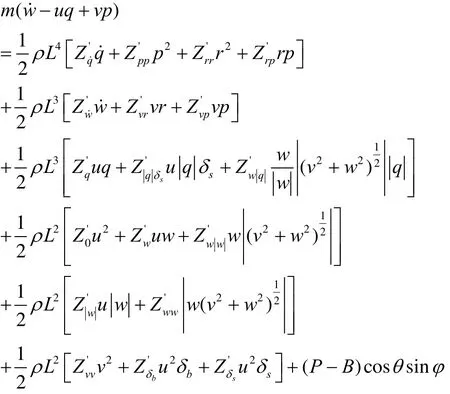
根據(jù)國(guó)際拖曳水池會(huì)議(ITTC)和美國(guó)造船工程師協(xié)會(huì)(SNAME)給出的術(shù)語(yǔ)和符號(hào)體系,水下航行器的非線性運(yùn)動(dòng)模型為[2]:縱向運(yùn)動(dòng)方程
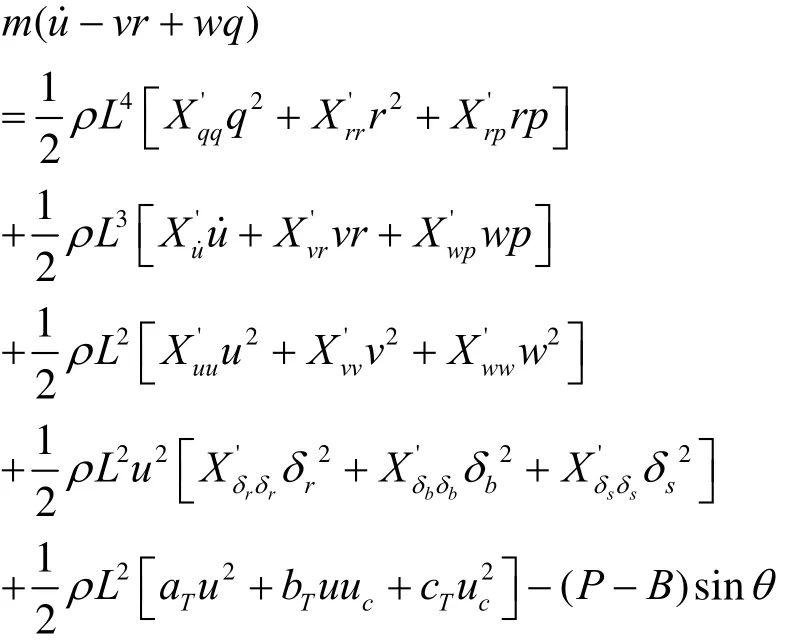
側(cè)向運(yùn)動(dòng)方程
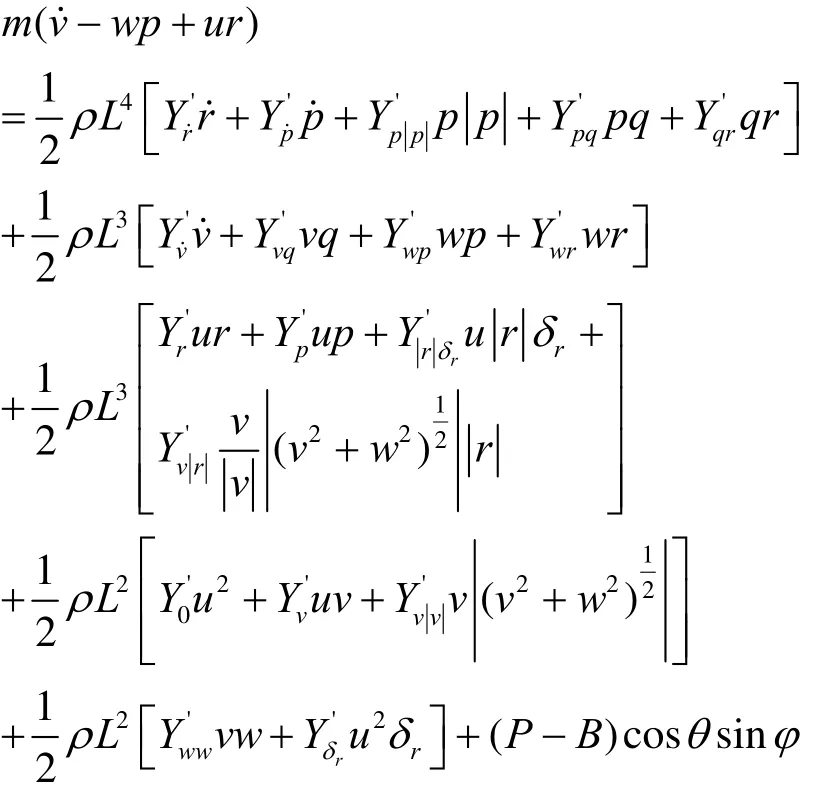
垂向運(yùn)動(dòng)方程
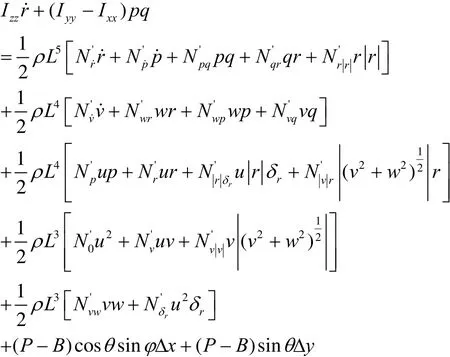
偏航運(yùn)動(dòng)方程
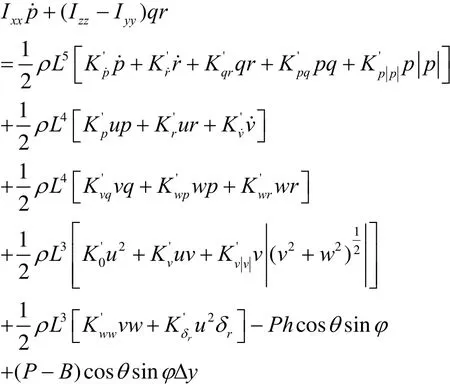
橫傾運(yùn)動(dòng)方程
縱傾運(yùn)動(dòng)方程
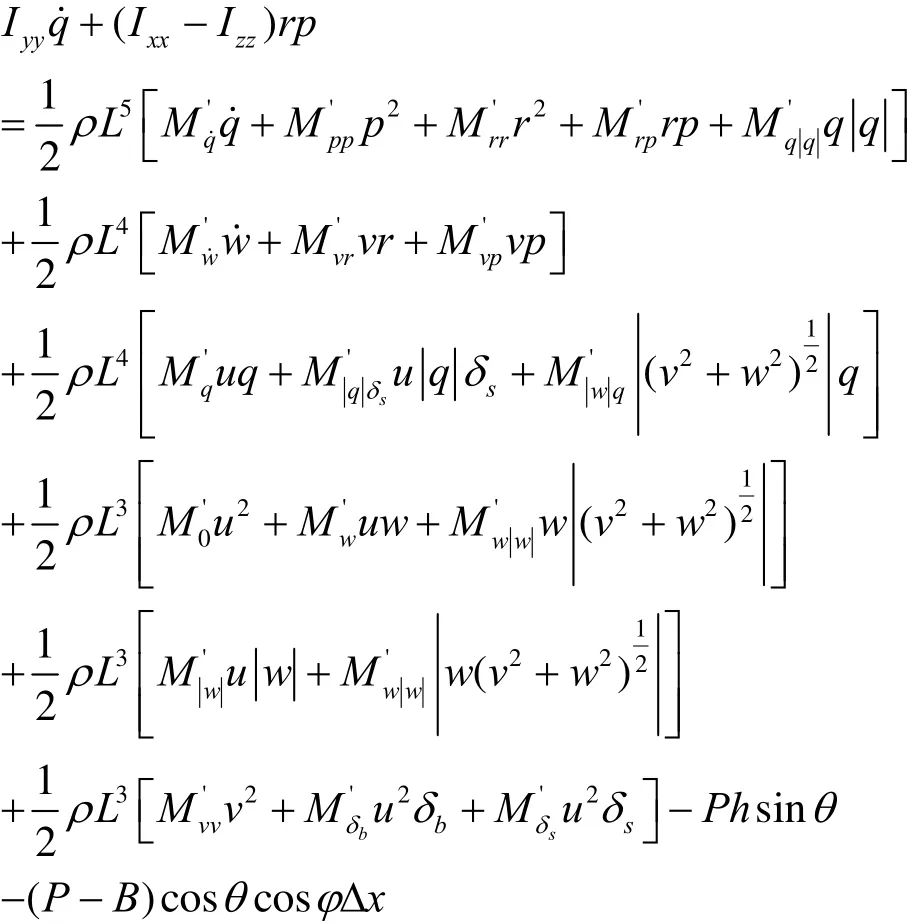
除了上述6個(gè)運(yùn)動(dòng)方程外,還有輔助方程,但由于篇幅所限不能一一列出。其余的方程及方程中符號(hào)的含義,可以參考文獻(xiàn)[2]。
2 Fuzzy PI+ Fuzzy ID型控制器
在水下航行器的運(yùn)動(dòng)中有很多指標(biāo)需要控制,有速度、航向、深度及縱傾等。本文以水下航行器的深度控制為例闡述Fuzzy PI+ Fuzzy ID型控制器的原理及其控制效果。
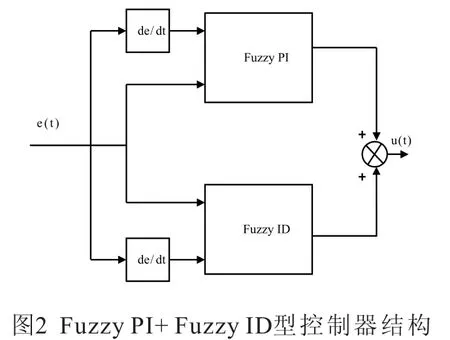
PID控制因?yàn)槠浣Y(jié)構(gòu)簡(jiǎn)單并容易實(shí)現(xiàn)等優(yōu)點(diǎn)而被廣泛應(yīng)用。但是對(duì)于水下航行器這種復(fù)雜的控制對(duì)象而言,PID控制往往不能達(dá)到滿意的效果。模糊控制綜合了人的思維、專家知識(shí)及經(jīng)驗(yàn),往往能夠彌補(bǔ) PID控制的不足。本文所研究的Fuzzy PI+ Fuzzy ID型控制器就是結(jié)合PID控制與模糊控制的優(yōu)點(diǎn),以達(dá)到對(duì)水下航行器的良好的操縱控制效果。Fuzzy PI+ Fuzzy ID型控制器的原理結(jié)構(gòu)如圖2所示。模糊控制的輸入變量主要有一維、二維和三維,控制效果與輸入變量的維數(shù)有很大關(guān)系,一般情況下,維數(shù)越高,控制效果越好。但是高維數(shù)也會(huì)導(dǎo)致控制器的結(jié)構(gòu)復(fù)雜,實(shí)現(xiàn)起來(lái)較為困難。通常情況下,二維模糊控制器應(yīng)用較為廣泛,因?yàn)槠鋸?fù)雜程度適中,并且精度能夠達(dá)到要求[3]。
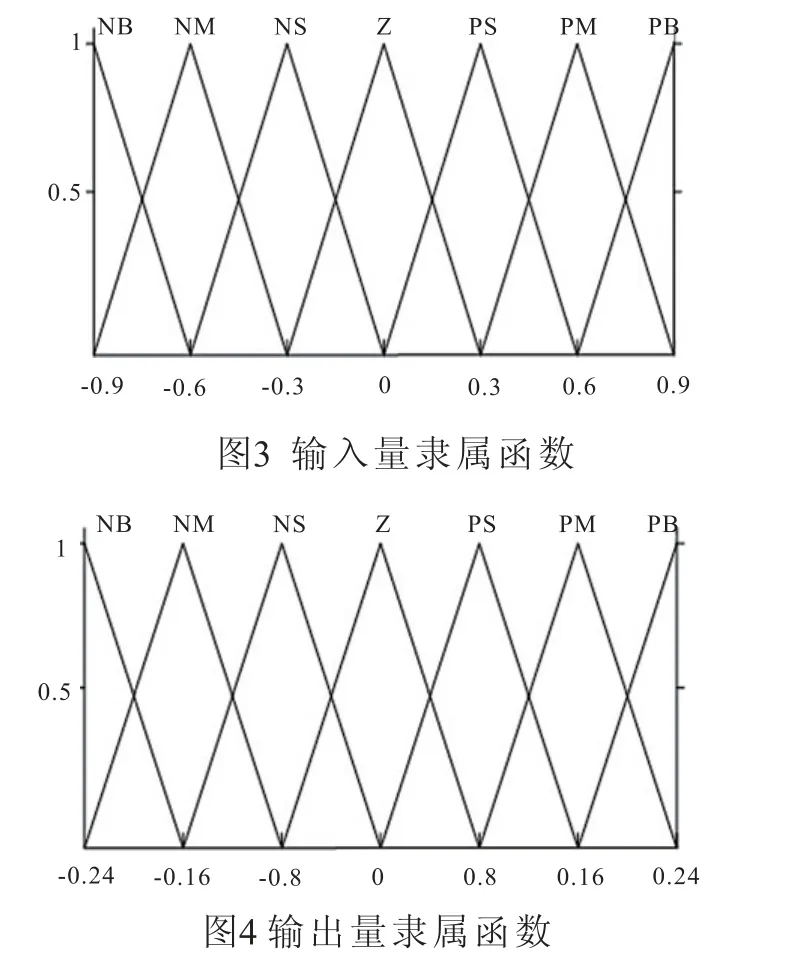
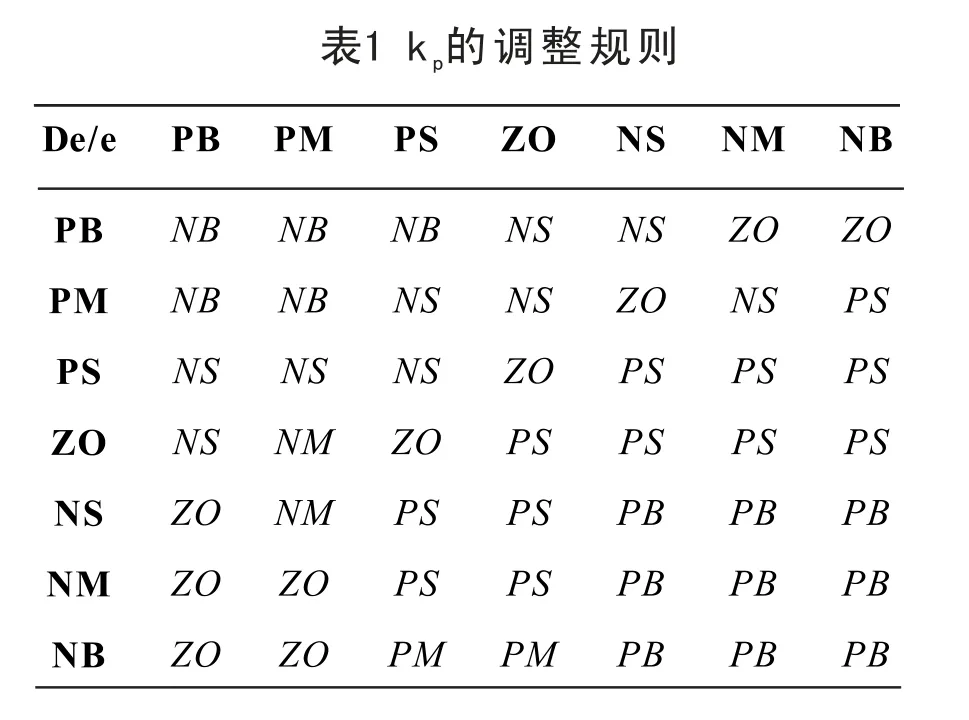
模糊控制器的兩個(gè)輸入量分別是誤差信號(hào)e及誤差變化率de,輸出量為舵角δ。設(shè)定航行器的深度變換范圍為-90<Δζ<90,由于操舵系統(tǒng)的限制,舵角的變化范圍為-30°<δ<30°。建立e,de的隸屬函數(shù)如圖 3所示,建立Δkp,Δki和Δkd的隸屬函數(shù)如圖4所示。
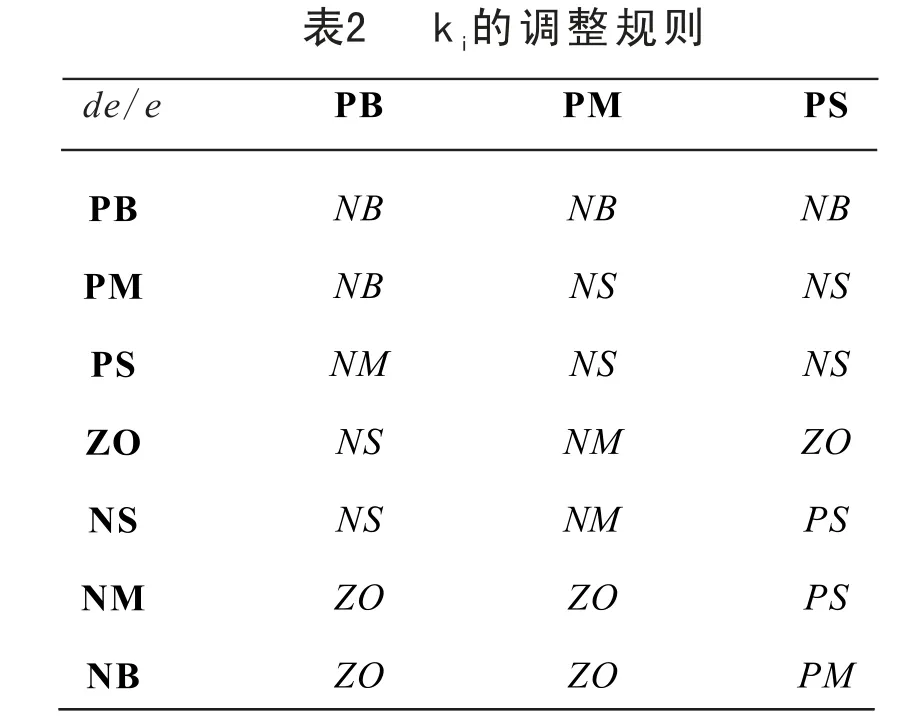
PID控制的參數(shù)一般是固定的,在Fuzzy PI+Fuzzy ID型控制器中,根據(jù)e及de的變化通過(guò)模糊規(guī)則對(duì)kp、ki和kd進(jìn)行實(shí)時(shí)調(diào)節(jié),從而實(shí)現(xiàn)更好的控制效果。kp、ki的調(diào)整規(guī)則見表1和表2。
?
3 仿真試驗(yàn)
基于上文的論述,在MatlabSimulink環(huán)境下建立控制系統(tǒng)框圖,進(jìn)行仿真試驗(yàn)[4-6]。試驗(yàn)初始條件是:航速u0=6 m/s,初始深度ζ0=10 m,舵角δ0= 0°。
?
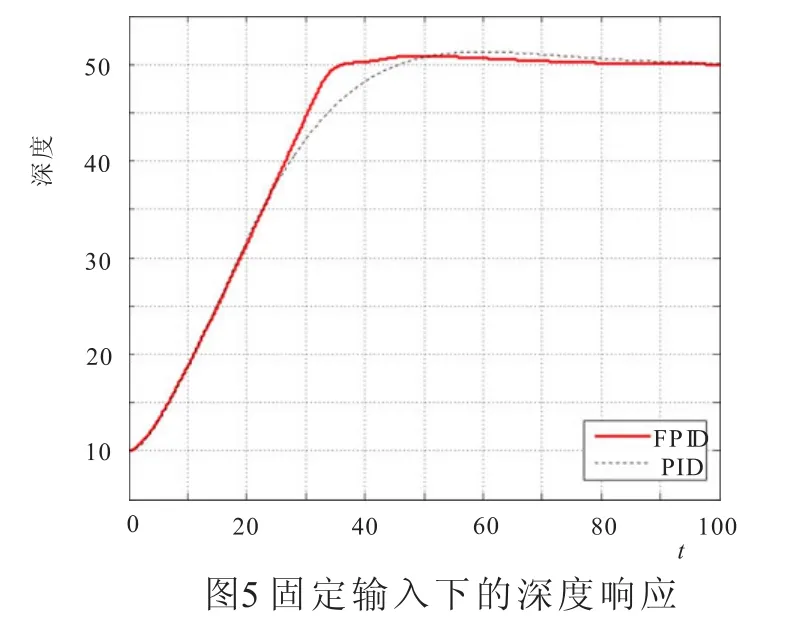
在試驗(yàn)1中,將深度設(shè)定為50 m,其控制響應(yīng)曲線如圖5所示。在與傳統(tǒng)PID控制的比較中,可以發(fā)現(xiàn),F(xiàn)uzzy PI+ Fuzzy ID型控制器在多個(gè)方面具有優(yōu)越性,它的超調(diào)量及上升時(shí)間都要小很多。
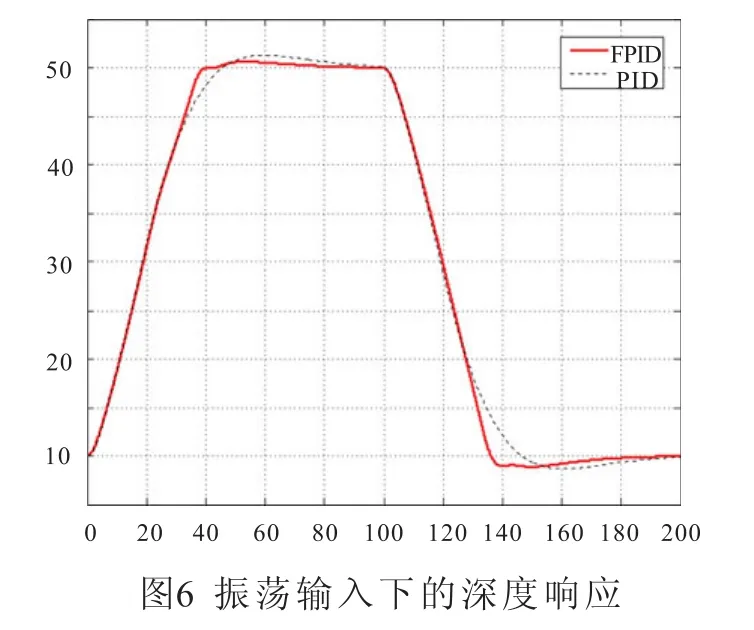
某些控制器只是在特定的工況下才表現(xiàn)出良好的性能,當(dāng)工況變化時(shí),控制效果也會(huì)發(fā)生較大偏差。為驗(yàn)證Fuzzy PI+ Fuzzy ID型控制器的魯棒性,試驗(yàn)2中給出的設(shè)定深度在50 m與10 m之間振蕩,而控制器的參數(shù)保持不變,其控制響應(yīng)曲線如圖6所示。可以看出,在動(dòng)態(tài)的輸入中,F(xiàn)uzzy PI+Fuzzy ID型控制器依然保持較小的超調(diào)量及上升時(shí)間,具有較好的魯棒性。
4 結(jié)論
水下航行器的操縱控制具有強(qiáng)非線性及模型不確定性等特點(diǎn),屬于比較難控的對(duì)象。傳統(tǒng)PID控制雖然技術(shù)成熟,應(yīng)用廣泛,但是對(duì)于水下航行器的操縱來(lái)說(shuō),很難達(dá)到理想的控制效果。Fuzzy PI+Fuzzy ID型控制器將傳統(tǒng)PID控制與模糊控制結(jié)合起來(lái),綜合了二者的優(yōu)點(diǎn)。仿真試驗(yàn)表明,F(xiàn)uzzy PI+Fuzzy ID型控制器在多個(gè)方面都具有優(yōu)越性,具有較小的超調(diào)量,較短的穩(wěn)定時(shí)間、上升時(shí)間,以及較好的魯棒性,可以適用于水下航行器的操縱控制。
[1]Wang Wenwu, Wang Yi, Yin Kailian. Modeling and smulation of six DOF mneuvering for submarine[C].Proceedings of International Conference on Navigation, Guidance and Control, Harbin, China,2001: 428-432.
[2]施生達(dá). 潛艇操縱性[M]. 北京:國(guó)防工業(yè)出版社,1995.
[3]張建民等. 智能控制原理及應(yīng)用[M]. 北京:冶金出版社,2004.
[4]劉金琨. 先進(jìn)PID控制MATLAB仿真[M]. 北京:電子工業(yè)出版社,2004.
[5]Liuang, Miwei, Guo Chen. Study of fuzzy self-tuning steering controller for ship course [J]. Navigation of China, 2010, 33(1): 11-15.
[6]黃友銳,曲立國(guó). PID參數(shù)整定與實(shí)現(xiàn) [M]. 北京:科學(xué)出版社,2010.
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
中華詩(shī)詞(2018年11期)2018-03-26 06:41:34
Coco薇(2016年8期)2016-10-09 02:11:50
新聞傳播(2015年10期)2015-07-18 11:05:40