對鐵路接觸網激光測量系統的探討
2013-09-20 01:21:28毛虹
中州大學學報 2013年3期
毛 虹
(焦煤集團計訊處,河南 焦作454150)
1 .引言
鐵路接觸網擔負著從牽引變電所所獲得的電能,直接供給電力機車使用的重要任務,它的質量和工作狀態直接影響著電氣化鐵路的運輸能力。[1-3]對其檢修和維護,首先要進行有關參數(導高、承力索高度、接觸網和承力索高差、外軌超高、拉出值、跨距等)的測量。隨著鐵路大規模提速以及高速鐵路的建設,要求對接觸網參數測量的速度不但要快,而且要更精確。[4]
目前國內在鐵路接觸網方面的測量方法主要有兩種:
(1)吊桿與卷尺相結合的測量方法;
(2)激光測距儀與光學觀察系統相結合的測量方法。
吊桿與卷尺相結合的測量方法,測量時間長,精度低,需要進行人工記錄和計算;激光測距儀與光學觀察系統相結合的測量方法,只能在軌平面垂直方向測量而不能在軌平面水平方向測量,即只能測量俯仰方向角度而無法測量方位方向角度,從而限制了對軌距、跨距、建筑側面限界等參數的測量。
分析以上兩種測量方法的優點和不足,根據接觸網檢修和維護的實際需求,本文研究了一種利用距離傳感器、角度傳感器、位移傳感器、CCD攝像機和嵌入式數據處理系統,進行鐵路接觸網參數測量的新方法,開發了一種高性能的接觸網測量系統,不僅可以測量接觸網的導高、拉出值、接觸網和承力索高差、外軌超高等參數,而且可以測量軌距、跨距、側面限界、紅線等參數。整個測量系統操作簡便、對各個參數的測量速度快、精度高。
2 .系統的硬件組成及工作原理
系統的硬件部分由測量儀、CCD攝像組件、顯示及操作面板和測量架組成,如圖1所示。
測量儀用來測量目標的距離、方位角度和俯仰角度參數,它主要由半導體激光器、測距發射和測距接收部分、方位角度測量光柵和俯仰角度測量光柵等組成。
CCD攝像組件用來對測量目標進行觀察和瞄準,它主要由物鏡和CCD組成,其中物鏡的焦距和口徑根據觀察目標的距離和大小來確定,CCD采用高分辨率像素以使目標的成像更清晰,從而減小瞄準誤差。
顯示及操作面板用來顯示測量目標和測量參數信息,顯示屏為3.5英寸液晶屏,在面板上布局各種操作按鈕,可實現對不同參數的測量和對測量數據進行保存、刪除、導出等操作。
測量架用來支撐測量儀并實現和鐵軌的測量定位,測量架上有位移傳感器和傾斜傳感器,位移傳感器用來測量軌距,傾斜傳感器用來測量軌平面相對大地水平面的夾角。
系統工作原理如圖2所示。把測量系統安裝在鐵軌上,通過旋轉測量儀的高低和水平向,使測距的激光點可以精確地瞄準測量目標。測量系統瞄準光軸和激光測距光軸同軸,同時在顯示屏上有十字分劃,十字分劃和測距激光點校為重合,則十字分劃的中心壓住接觸網線的中心時即為精確瞄準,此時通過操作面板就可對各個參數進行測量。
A點是測量目標點,A'是A點在軌平面內的投影,B點是A'在兩鐵軌中心線上的垂足,D點是測量基準點,O是D點在鐵軌1上的垂足,α是A'D和DO的夾角,β是DA和軌平面夾角。利用三角形的邊角關系計算出 AA'(導高)和 A'B(拉出值)等參數;再利用不同點的導高、拉出值,可以計算出水平間距、垂直高差及偏移角度。利用位移傳感器測量軌距,結合傾斜傳感器,便可測量出外軌超高。用光柵進行高精度角度測量,相位激光測距儀進行目標距離高精度測量。其中觀察光軸、激光測距發射和激光測距接收光軸三軸重合,確保測量數據的準確性。

圖1 系統組成
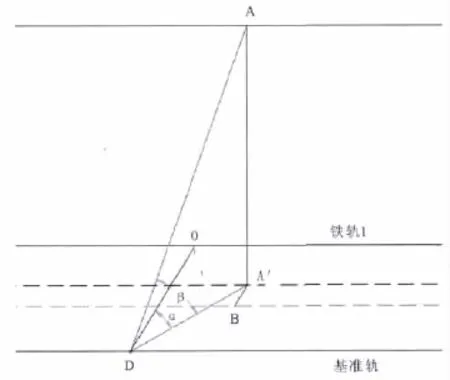
圖2 系統工作原理
3 .測量數學模型和誤差分析
測量接觸網參數所用到的數據:位移傳感器電阻值,傾斜傳感器的角度值,測距儀的距離值和光柵的角度值。
位移傳感器電阻值:5KΩ,對應距離555 mm;傾斜傳感器的角度:范圍[-10~ +10]°,精度1';測距儀測量的距離 L:范圍[0.5~70]m,精度ΔL為2mm;
光柵的角度值:和軌平面垂直向夾角β,在軌平面內的角度α;精度Δβ、Δα為2″。
3.1 目標點在軌平面內的投影和基準軌的距離

其中L//為目標點在軌平面內的投影和基準軌的距離;L為測距儀測量目標距離;α為目標點在軌平面內的投影和基準軌法線夾角;β為目標點和軌平面夾角。
公式(1)誤差傳遞公式為:

當α、β為0 時,ΔL//值最大:

由公式(3)知,目標點在軌平面內的投影和基準軌的距離誤差主要由測距儀的誤差傳遞影響。
3.2 導高的測量

其中H為接觸線的導高;L為測距儀測量的目標點距離;β為目標點和軌平面夾角。

3.3 拉出值的測量
測量要求范圍:(-600 mm~600 mm),一般默認測量位置在鐵軌左側。

其中D為拉出值;L為測距儀測量的目標點距離;α為目標點和基準軌法線夾角;β為目標點和軌平面夾角。

4 .系統的軟件部分
系統軟件是專門為圖像采集顯示工業控制終端定制的一套軟件解決方案,采用自下而上的層次化分析和構建方法,把整個系統的軟件劃分為操作系、設備驅動層與應用軟件層,采用嵌入式linux操作系統作為應用軟件的運行環境。
嵌入式系統是嵌入式操作系統和數據處理程序運行的平臺,進行各種參數測量的操作控制和計算,同時對測量目標在CCD上的圖像進行采集并顯示。
根據外部具體接口設計接口驅動,系統應用軟件具有以下幾個功能:
(1)提供友好的人機界面功能,用戶能夠方便的進行操作;
(2)實現圖像采集顯示功能;
(3)可對數據信息進行記錄、存儲和導出;
軟件部分的工作流程為:觀察通道CCD圖像經采集卡傳給主板CPU,經處理后傳給顯示屏顯示;傳感器測量500mm處線岔間距、軌距和傾角,測量儀測量導線的斜距和角度等參數,傳感器和測量儀測量的參數傳給嵌入式主板ARM9 CPU進行數據處理,得到測量項目的參數,并把有用的數據保存起來,然后利用電子報表自動生成系統進行數據的歸類統計,形成標準電子文檔。
5 .測量系統的不確定度分析
把接觸網激光測量系統放在標定的標準軌上,對標定的接觸網的高度和拉出值進行測量,按照JJF1059-1999對測試結果的不確定度分量進行分析和評定,結果可得出其測量精度為±5 mm。
系統的不確定度來源主要由測量重復性、環境、測量目標位置差異和標準器引起。
5.1 測量重復性引入的不確定度分量
在標準軌的固定點,裝上測量系統,進行測量,然后取下測量系統,這樣重復10次類同的操作測量,測得10組數據如表1。
H是接觸線高度;L表示拉出值。

表1 測量結果(測量重復性)
5.2 環境引入的不確定度分量
在標準軌的固定點,裝上測量系統,對接觸線高度連續10次測量,測得10組數據如表2。

表2 測量結果(環境因素)
同理可計算出標準偏差為:SH2=0.63,SL2=0.28。
5.3 測量目標的位置差異引起的不確定度分量
在標準軌的固定點,裝上測量系統,對準接觸線,進行測量,每測量完一次,再重新對準接觸線,同樣步驟進行10次測量,測得10組數據如表3。

表3 測量結果(目標的位置差異)
同理可計算出標準偏差為:SH3=0.51,SL3=0.28。
5.4 標準器引入的不確定度分量
在測量時,用10 m卷尺,準確度為II級,用其測量標準鐵軌,在軌距1435 mm距離上的誤差為:Δ=0.2*1.435=0.287 mm。由此引入的不確定度分量為:SL4=0.287 mm。
試驗用0.02 mm/m水平儀校正標準鐵軌上的平面,按最大量程軌距1435 mm計算,帶來的誤差為0.0287,由此引入的不確定度分量為:

5.5 合成標準不確定度
各不確定度分量為獨立分量,不存在相關性,則合成不確定度為:
相關的數據帶入計算可得:SH=1.2,SL=0.61。
由此可得出接觸線高度和拉出值合成不確定度3SH和3SL分別小于5 mm,因而該測量系統滿足精度±5 mm誤差要求。
6 .結論
作為接觸網測量中心任務之一的接觸網幾何參數自動測量,已引起國內外有關專家的極大關注。本文介紹了一種距離傳感器、角度傳感器、位移傳感器、單CCD攝像機和嵌入式數據處理技術實現對鐵路接觸網參數的激光測量系統。相比國內目前的幾種測量方法,這種測量系統原理正確、精度高達±5mm、速度快、測量的參數全,測量數據可自動生成電子報表格式。它將被廣泛應用于鐵路接觸網的日常檢修和維護中,對高速鐵路的正常運行具有極其重要的作用。
[1]吳昌博,周洪.接觸網應力實時檢測及短線事故預警系統[J].微計算機信息,2009(25):102-103.
[2]邸榮光.準高速鐵路接觸網動態參數測量研究[J].科技廣場,2005(1):90-92.
[3]于萬聚.高速電氣化鐵路接觸網[M].成都:西南交通大學出版社,2001.
[4]吳健,張華.接觸網多參數測量儀設計[J].微計算機信息,2008(10):47-50.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45