電氣動程序步進控制的設計與應用
2013-09-19 06:27:56宋志剛
深圳職業技術學院學報 2013年3期
宋志剛
(深圳職業技術學院 機電工程學院,廣東 深圳 518055)
隨著現代機電液氣一體化技術的發展,對多動作電氣動控制回路的設計要求越來越高,設計者需要綜合掌握機械、電氣、液壓、氣動等各種技術.為此,筆者在對德國費斯托公司MTS氣動訓練設備進行教學研究的過程中,對電氣動系統步進控制進行了研究和分析,得出了一種有規律可循的步進控制模式.
1 電氣動程序步進控制模式
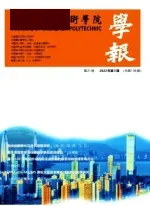
電氣動程序步進控制模式主要分為2部分,一部分為根據順序動作觸發的控制條件采用的中間繼電器和檢測氣缸伸出或縮回位置的傳感器而形成的輸入模式,如圖1所示;另一部分為控制氣缸伸出縮回動作的輸出模式,主要控制氣缸換向電磁閥的得電,如圖2所示.
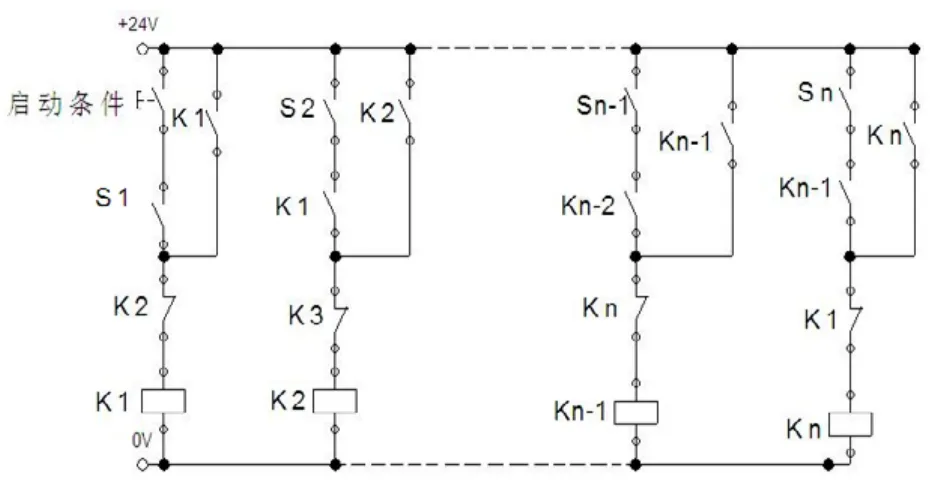
圖1 步進輸入控制模式
圖1中,K1,K2,…,Kn等為中間繼電器的線圈及常開、常閉觸點;S1,S2,…,Sn等為氣缸伸出或縮回的觸發條件,也即為第2個、…、n個動作的觸發條件.啟動條件一般為按鈕開關,這也是第一步動作觸發與后面動作觸發不同之處[1];S1一般為程序啟動的初始條件或下一次循環的條件(即自動循環模式).只有啟動條件和初始條件全部滿足才能驅動第一個動作.K2常閉觸點是為了保證開始第二個動作前切斷第一個動作,這樣確保每次只進行一個動作,動作與動作之間互不干涉.最后一個動作用K1常閉觸點切斷,這樣整個動作就形成了一個往復循環動作.如果一個電氣動程序控制系統的要求為A+B+B-A-(A、B為氣缸,+表示氣缸伸出,-表示氣缸縮回)[2],則整個程序有4步,則n=4,需要用到4個中間繼電器.
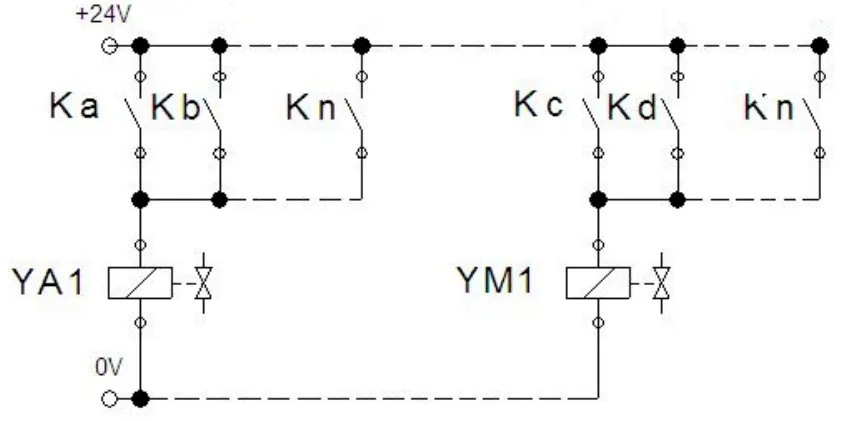
圖2 步進輸出控制模式
圖2所示中,YA1,YM1等代表氣缸A到M的單電控電磁閥線圈.而Ka,Kb,Kc,Kd,Kn等分別代表步進輸入控制模式中各個中間繼電器K1,K2至Kn-1,Kn的常開觸點.以上述電氣動控制系統A+B+B-A-為例,因為只有2個氣缸需要控制,則只需要2個兩位五通單電控電磁閥YA1和YB1來控制氣缸A、B的伸出和縮回(假設氣缸A、B初始位置均處于縮回狀態,YA1,YB1得電使氣缸伸出),共4步,其中A+伸出在第一步,而A-縮回在第四步,也就是說電磁閥YA1需在前面3步都需通電,故Ka、Kb、Kn需分別用中間繼電器K1,K2,K3的常開觸點K1,K2,K3來代入;而B+伸出在第二步,B-縮回在第三步,故Kc,Kd,Kn只需用第二步動作觸發條件的中間繼電器K2的常開觸點K2代入即可.
2 應用設計實例
以一銑床夾持器加工鋁工件端面的電氣動程序控制系統裝置來驗證步進控制模式[3].圖3所示為銑床夾持器裝置簡圖,銑床夾持器工作過程為氣缸A伸出將從重力進給物料倉下來的工件推入到夾定裝置內,氣缸B伸出夾緊工件,氣壓-油壓進給單元C伸出產生夾定裝置的進給運動,銑刀銑削鋁工件端面并在銑削操作完畢時由頂出氣缸D伸出頂出工件,氣壓-油壓進給單元C縮回再使夾定裝置回至起始位置,銑床夾持器的位移一步驟圖如圖4所示,從圖4位移-步驟圖可以看出銑床夾持器完成一個完成的工作循環的動作順序為:A+B+A-C+B-D+D-C-.銑床夾持器工作流程圖如圖5所示.
圖3 銑床夾持器裝置簡圖
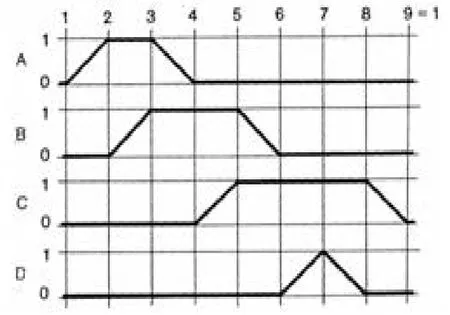
圖4 銑床夾持器裝置的位移-步驟圖
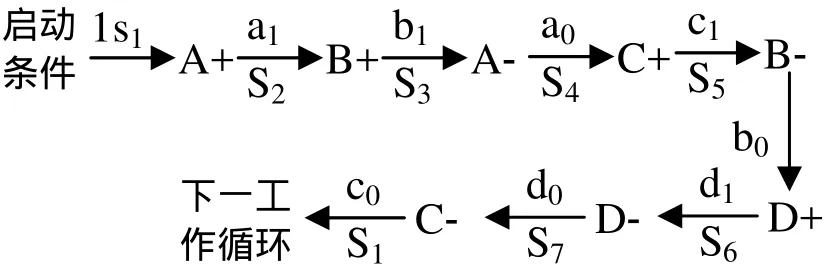
圖5 銑床夾持器工作流程圖
圖5中,啟動條件1s1為按鈕開關,a0,a1,b0,b1,c0,c1,d0,d1為氣缸的磁性開關,用于檢測氣缸活塞的位置,其中1表示氣缸活塞處于伸出位置,0表示氣缸活塞處于縮回位置,如a1表示氣缸A伸出到位的檢測信號,為下一動作B+的觸發條件.氣缸磁性開關下的S1,S2,S3,S4,S5,S6,S7分別對應圖2中的條件S1至Sn.
按照前述電氣動程序步進控制模式的要求,可以非常方便的設計出銑床夾持器裝置的電氣-氣動程序,電氣動控制回路一般包括氣動回路和電氣控制回路兩部分,氣動回路一般指動力部分,電氣回路指控制部分[4].氣動回路圖如圖6所示,電氣控制回路圖如圖7所示.
圖6所示銑床夾持器氣動回路圖中,0Z1表示氣源;0Z2表示氣動二聯件[5];A,B,C,D表示單活塞桿雙作用氣缸;YA1,YB1,YC1,YD1表示控制氣缸A,B,C,D的2位五通單電控電磁閥;1V1,1V2,2V1,2V2,3V1,3V2、4V1,4V2表示控制氣缸A,B,C,D伸出和縮回速度的單向可調節流閥;A0,A1,B0,B1,C0,C1,D0,D1表示檢測氣缸A,B,C,D活塞位置的磁性開關,表示氣缸縮回或伸出到位.
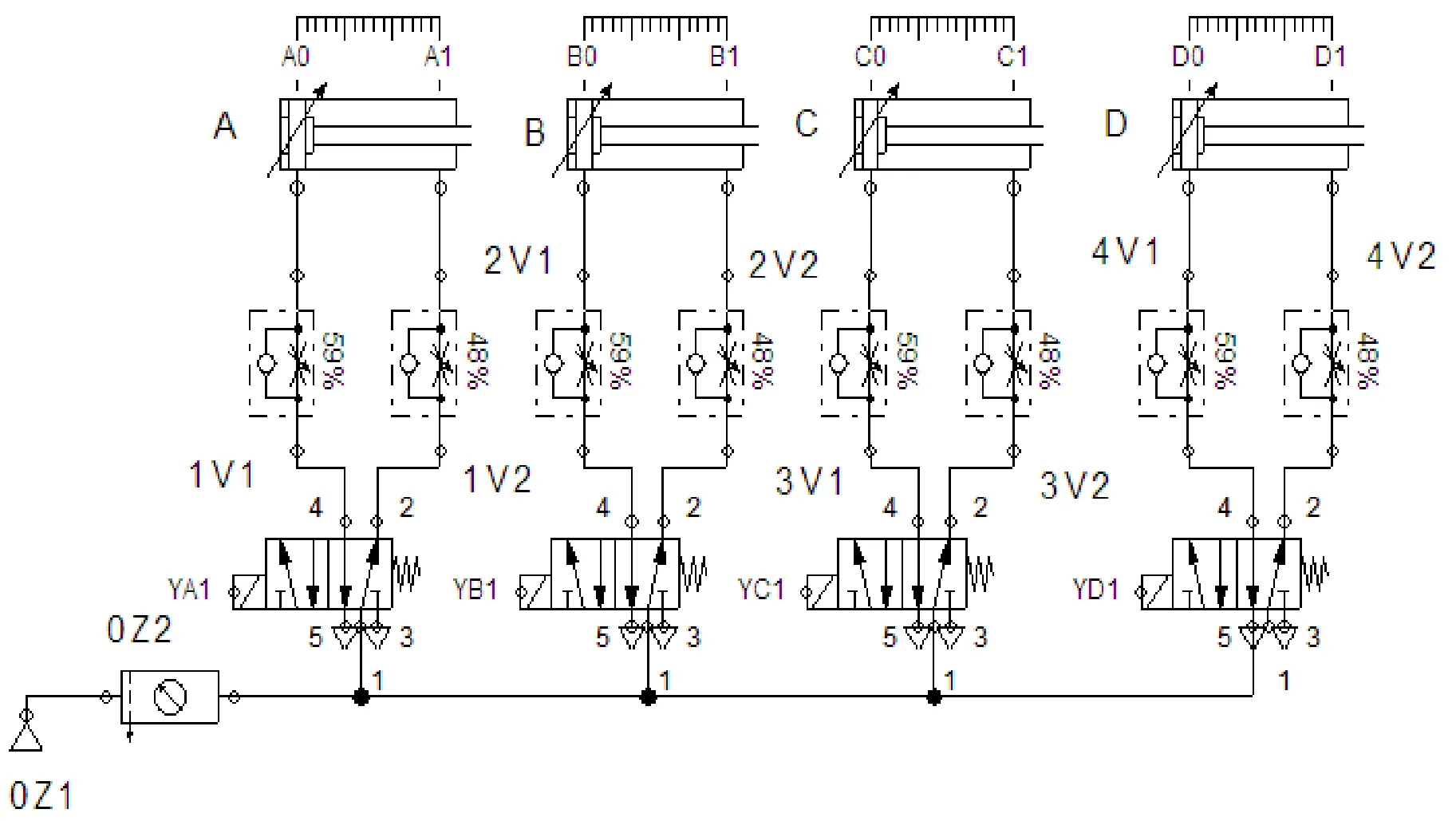
圖6 銑床夾持器氣動回路圖
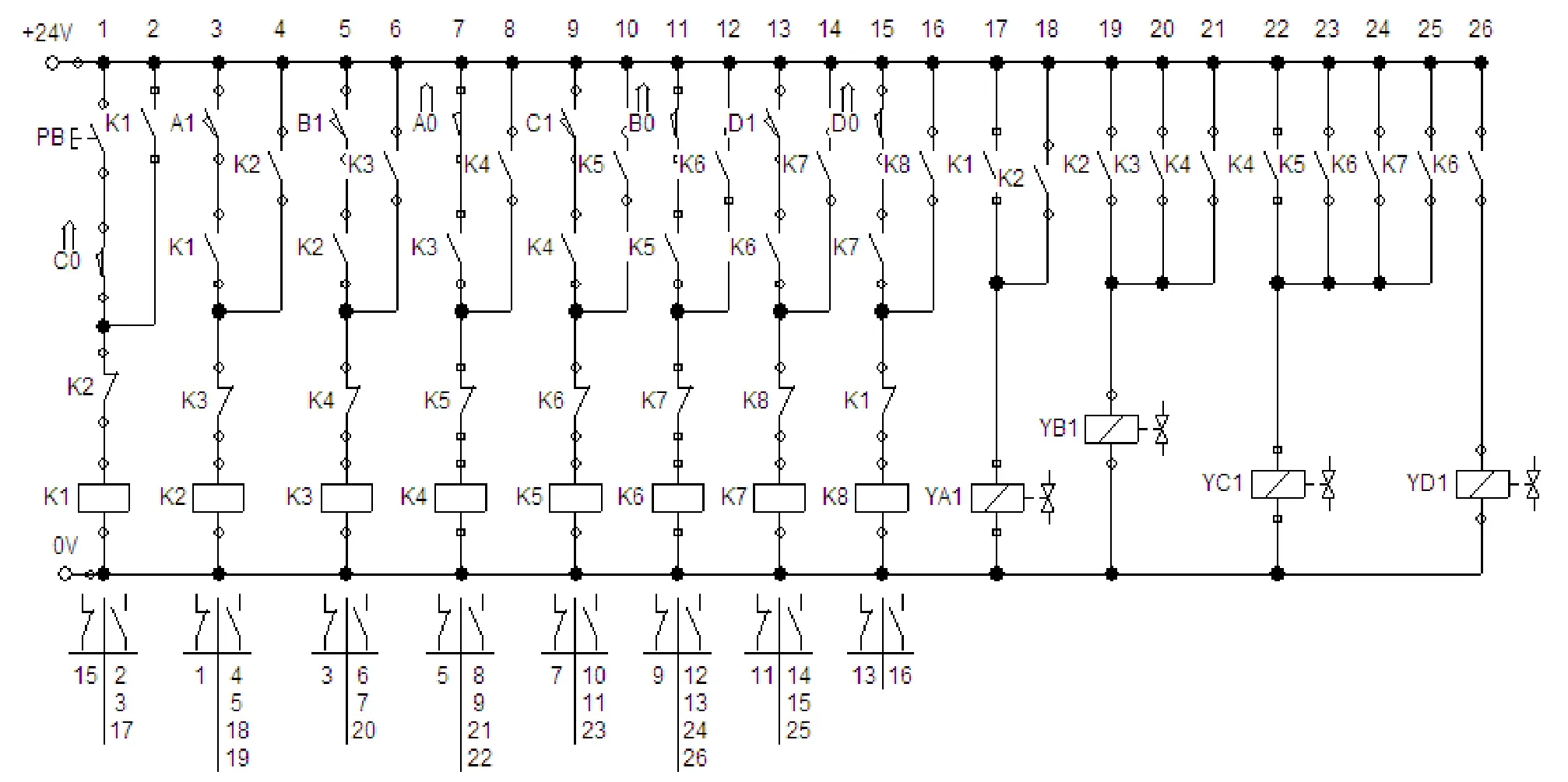
圖7 銑床夾持器電氣控制回路圖
圖7所示銑床夾持器電氣控制回路中,銑床夾持器的一個工作循環的步驟為A+B+A-C+B-D+D-C-,共8步,中間繼電器K需用8個,n=8,有4個氣缸,電磁閥線圈需用4個,分別為YA1,YB1,YC1,YD1.因為A+在第一個動作,而A-在第三個動作,故YA1需用中間繼電器常開觸點K1,K2來驅動;而B+在第二步,B-在第五步,故YB1需用中間繼電器常開觸點K2,K3,K4來驅動;而C+在第四個動作,C-在第八個動作,故YC1需用中間繼電器常開觸點K4,K5,K6,K7來驅動;D+在第六步,而D-在第七步,故YD1只需用中間繼電器常開觸點K6來驅動即可.
該種電氣動程序系統步進控制模式簡單,設計速度快,動作準確,可為應用PLC編程提供理論依據.
[1] 紀宏.液壓系統電動步進控制模式分析[J].流體傳動與控制,2005(3):45-47.
[2] 左建民.液壓與氣壓傳動[M].北京:機械工業出版社,1997.
[3] 杜方輝,盛小明.由組合氣缸驅動的機械手雙爪差動平移夾持器[J].液壓與氣動,2012(8):35-37.
[4] 朱梅,朱光力.液壓與氣動技術[M].西安:西安電子科技大學出版社,2007.
[5] 陸鑫盛,周洪.氣動自動化系統的優化設計[M].上海:上海科技文獻出版社,2000.
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
人大建設(2019年12期)2019-05-21 02:55:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
環球時報(2017-03-30)2017-03-30 06:44:45
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
中國衛生(2015年3期)2015-11-19 02:53:32