微網體系結構及相關問題研究*
2013-09-19 06:27:54王根平
深圳職業技術學院學報 2013年3期
王根平
(深圳職業技術學院 機電工程學院,廣東 深圳 518055)
1 微網系統的分層系統結及構協調機制
隨著對太陽能發電、風力發電等綠色能源的大規模開發利用,傳統的集中發電、集中送電和集中配電的大電網運行模式已受到越來越大的挑戰.為應對這些挑戰,專家學者們提出了微網系統這一概念,所謂微網就是由某一區域的分布式發電電源、各種用電負荷組成的可控的電力系統,這種系統對用戶而言,表現為一個可定制的電源,對大電網而言表現為單一的受控單元.綜合微網的研究成果[1-5],微網應具備如下特性:
1)整個微網的運營應符合市場原則,這樣,微網的發展才有生命力;
2)微網是由分布式用電負荷和分布式發電電源(DG)以及儲能設備共同組成的供配電系統;
3)微網通過公共接點(PCC)與大配電網連接,二者互為備用;也可以與大電網斷開,進行孤島運行;
4)微網中的DG可以在孤島運行和并網運行兩者之間平滑切換(孤島檢查,瞬時同步化),從而充分利用微網中的電源;
5)微網運行方式靈活,微網中的DG設備具有即插即用特性;在并網運行及孤島運行模式下對各種異常情況具有保護措施;
6)電力電子器件在微網的電能變換及電路斷開接通控制中起著非常重要的作用.
綜合上述微網的組成及工作特性,并考慮在微網系統設計及實際應用操作的方便,本文將微網總的體系設計成分層的3層體系結構:經營調度層,控制檢測層和電源負荷層,如圖1所示.
圖1中,箭頭方向表示信息傳遞方向.顯然,圖1所示的分層微網系統中,信息的傳遞只有在相鄰兩層之間發生.為確保整個體系信號聯系的規范及各層運行的相對獨立性,層與層之間確立以下協調機制:
1)層與層之間的信息交互,只允許相鄰層之間直接進行,而不允許不相鄰的層直接進行通信交互;
2)如果確實有不相鄰層之間信息交互的需要(即第一層經營調度層和第三層的電源負荷層之間存在信息交互的需要,也需要間接地通過相鄰層的傳遞,即通過檢測控制層來傳遞);
3)在同一層的各個單元模塊之間,不允許相互之間進行信息交互,如果確實存在不相鄰的同層模塊之間的信息交互需要,也需要通過它們的上一層進行間接傳遞和協調.
這樣一個協調機制的確立是非常重要的,因為只有這樣,才能保證微網系統的通信簡潔有效,保證微網系統中的各層,以及各層中的各個模塊能相對獨立地工作,系統運行才能簡單高效,也可以大大降低系統的網絡建設成本及通信運行維護成本,同時也能有效提升系統可靠穩定性.

圖1 微網分層體系結構示意圖
2 各層的關鍵問題研究
2.1 經營調度層
對于微網系統而言,各發電塊單元的運行時是有成本的,而且隨著發電功率的不同,成本也存在變化.對于微網中的用電負荷而言,各負荷也存在優先級問題,有些負荷必須保證不間斷供電,有些負荷可以允許臨時斷電等.所以,微網作為一個系統,需要考慮系統的成本因素,也需要考慮系統運行中存在的各種限制因素.
微網系統中的經營調度層的關鍵問題就是,如何實現整個系統的最優化調度運行.可以將微網系統作為一個優化控制系統整體,以運行成本最低化作為優化目標,以各種強行限制作為約束條件,使微網的運作能充分滿足經濟效益及社會效益的平衡.
為此,我們可以在經營調度層定義類似如下的目標函數(1):

式(1)中,FS為太陽能光伏電池以發電功率P為變量,以運行維護費為應變量的函數;Fw為風力發電機組以發電功率P為變量,以運行維護費為應變量的函數;Fg為燃氣輪機以發電功率P為變量,以運行維護費為應變量的函數;Ft為火電機組以發電功率P為變量,以啟動與運行費用為應變量的函數;Ff為燃料電池以發電功率P為變量,以運行費為應變量的函數;Fb為蓄電池以發電功率P為變量,以運行費為應變量的函數;FEn為以外大電網輸入電功率P為變量,以輸入的電費為應變量的函數;T為調度周期,一般為24 h.
約束條件:
1)功率平衡約束:

式(2)中PD為微網系統對網內發電單元的總發電率負荷需求;Ns,Nw,Ng,Nt,Nf,Nb分別為太陽能電池發電個數、風力發電機發電
個數、燃汽機發電個數、發電機組個數、燃料電池個數以及蓄電池個數.
2)各發電機功率上下限約束:

3)負荷有先級約束:

4)其他約束.
經營調度層將各發電單元的發電功率,功率約束等下達到下層檢測控制層的檢測控制模塊;通過檢測控制模塊控制各發電單元,按照經營調度層給定的目標運行.同時,經營調度層也將負荷優先級等參數下達到負荷控制模塊,使負荷控制模塊按優先級有效管理用電負荷.
2.2 檢測控制層
控制檢測層的關鍵問題有4個:1)如何實現微網按經營調度層給出的優化控制目標;2)如何保證微網的電能質量及負荷滿足要求;3)如何實現微網和外網的無擾動切換;4)在各種故障發生時,如何實現對網絡的保護.具體說來,檢測控制層,包含3個模塊:檢測控制模塊、網內負荷調度控制模塊和外網控制及網絡保護模塊.
2.2.1 檢測控制模塊
檢測控制問題是微網在實際運行中需要解決的主要關鍵問題.微網在實際運行中,會遇到多種系統干擾和沖擊.這些干擾和沖擊,如果處理不當,微網內的供電質量會受到嚴重影響而變差,微網中的用電負荷也將受到影響,設備安全也會受到威脅[6,7].檢測控制模塊的功能就是抑制這些干擾和沖擊,保證微網內電質量的穩定,并有效維護微網中用電設備的安全.
在微網系統中,可能存在著多種特性各異的DG.這些DG有的受環境影響較大,如光伏發電,風力發電;也有的分布式發電可以實現穩定的控制,如:微型燃氣輪機和燃料電池等.考慮微網中DG的特性及各種用電負荷的實際情況,目前,微網一般都采用V/f控制和P-Q控制相結合的控制策略[8,9].即,微網中那些發電易于控制,受環境因素影響小的DG一般采用V/f控制,這樣可以通過控制這些DG來穩定微網內的發電質量,保證微網內電的頻率和電壓的穩定;而那些收環境影響較大的DG,一般采用P-Q控制.
微網中對DG采用的這種V/f控制P-Q控制相結合的方式,既可以實現微網的電質量的穩定控制,又可以充分提高新型清潔電源(如光伏發電和風力發電等)的發電效率.很多專家把這種V/f控制P-Q控制相結合的方式稱為主從控制,即V/f控制為主,P-Q控制為從.
就目前對微網系統的研究結果來看[10-12],檢測控制模塊對微網中的DG組采用主從的控制結構和控制策略是比較適宜的選擇.另外,檢測控制模塊還需要解決電源組狀態的檢測和目標值的設定和調整問題.
2.2.2 網內負荷調度控制模塊
根據負荷的需求,網內負荷調度控制模塊,依據來自經營調度層的優化決策及負荷優先級排序信息,對網內負荷進行控制管理.當網內電源組出現問題,不足于網內負荷的需求時,則按負荷的優先級,依次關斷級別比較低的用電負荷,并向經營調度層申請調用外網的電力支援.
2.2.3 外網控制及網絡保護模塊
外網控制及網絡保護模塊[13-15],要解決2個主要的問題:一是根據需要,實現微網與外電網的聯網或切斷,確保微網聯網狀態或孤島狀態的正常運行;二是在網絡出現短路等異常情況下,能緊急處理,保證關鍵負荷或設備不受損害.
1)微網并網模式到孤島模式的切換.微網從并網模式到孤島模式的切換存在2種模式,一種是主動模式;另一種是被動模式.所謂主動模式,就是微網主動給主控制模式的DG發出指令,主動調節微網中的負荷,減小微網與外網的潮流交換,并在PCC過電流零點的時候斷開與外網的連接.所謂被動模式,就是微網那個的檢測控制模塊檢測到了系統有異常,存在孤島效應或電網故障情況,微網被迫發出斷網請求,主動控制模式的DG電壓給定值由外部給定轉換為內部給定.斷網成功后,主動控制模式的DG工作在V/f模式,維持微網供電的電壓和頻率穩定.
為減小微網從并網到孤島模式切換造成的沖擊,主動控制模式的DG在工作中一般都要跟蹤記錄電網電壓的幅值和相位值,并把所記錄的幅值和相位值作為主動控制模式的DG內部電壓參考信號的初始值.這樣可保證當微網從并網向孤島模式切換時,微網中DG輸出電參數延續電網原來運行的參數.
2)微網獨立的孤島模式向并網模式的切換.微網從孤島模式切換到并網模式時,需要保證并網前微網內的電壓幅值,電壓的相位值和電壓的頻率值與外網的電壓幅值,電壓的相位值和電壓的頻率值分別一致.
當微網通過對主動控制模式的DG的V/f控制實現了微網內的電參數和外網的電參數一致時,即可閉合PCC,完成微網從獨立的孤島模式到并網模式的切換.
2.3 電源負荷層
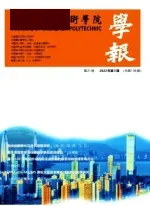
在電源負荷層,要配合檢測控制層實現主從控制模式,即部分DG需要采用V/f控制,部分DG需要采用P-Q控制.采用V/f控制的DG組成和控制系統結構組成如圖2,3所示; 采用P-Q控制的DG組成和控制系統結構組成如圖4,5所示.
微網系統正處于理論研究和實際應用探索的重要階段,微網系統體系結構的構建是其中非常重要的一個課題.可以預見,隨著研究和實踐的深入,一個能適應各種新型能源接入,能有效承擔起多樣特性負荷運營,可兼顧經濟效益和社會效益原則的微網體系能夠逐步建立完善起來.
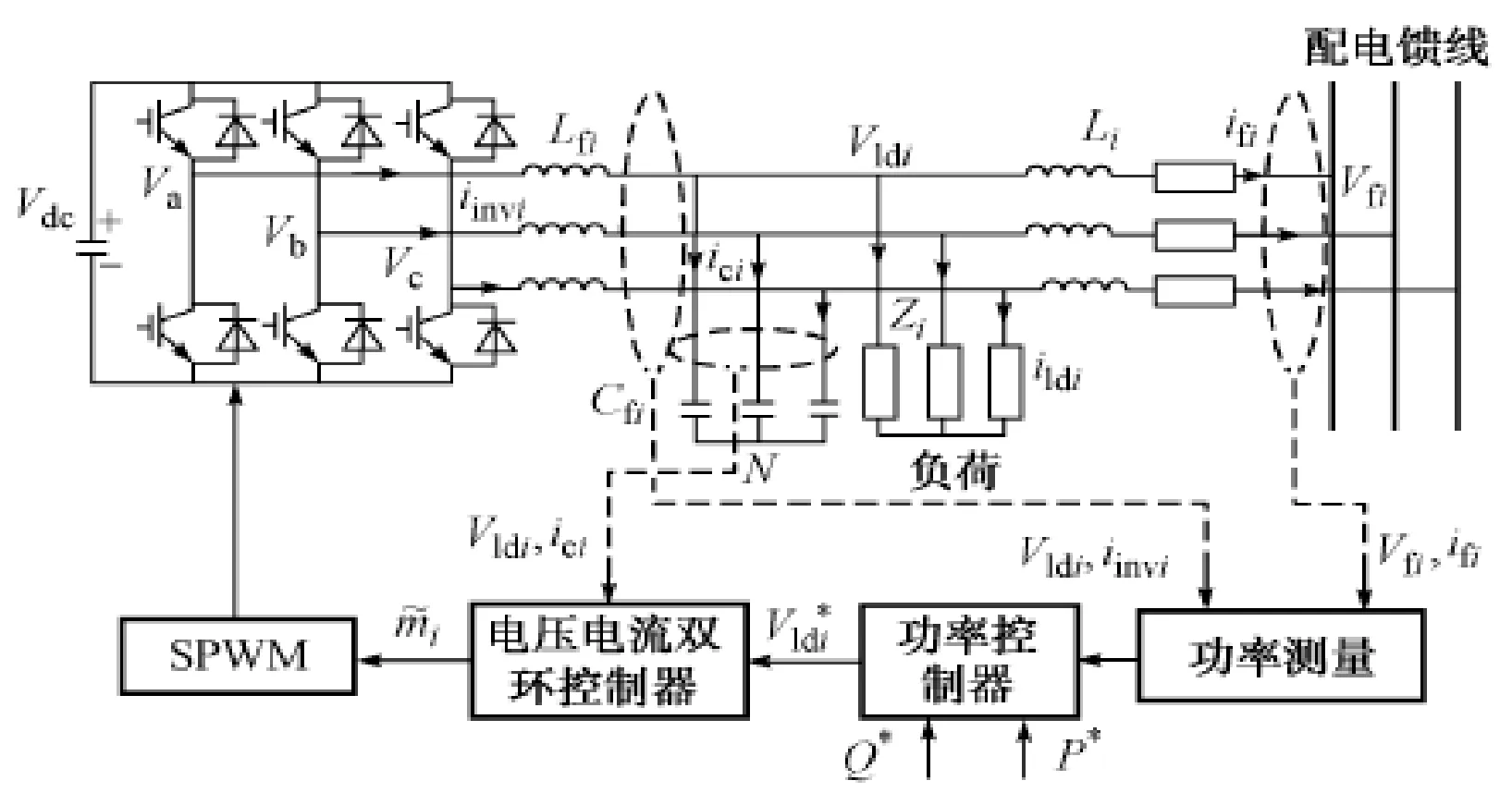
圖2 V/f控制的分布式電源組成示意圖
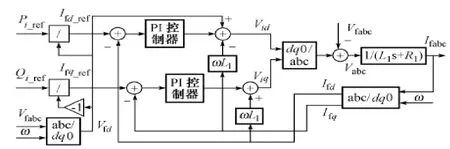
圖3 V/f功率控制器結構示意圖
圖4 P-Q控制分布式電源示意圖
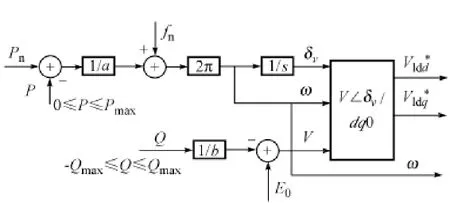
圖5 P-Q控制結構示意圖
[1] 陳靖,李雨薇,習朋,等.微網系統經濟運行優化[J].華東電力,2012(2):167-172.
[2] 劉廣斌.智能微網系統設計[J].硅谷, 2012(4):1671-7597.
[3] 楊宇全,陳彥.智能發電和負荷控制的微網系統[J].高科技與產業化,2012(5):70-73.
[4] 陳亞寧.基于分布式發電的微網系統建模研究[J].四川電力技術, 2010(4):9-12.
[5] 孫麗兵,李肖艷.基于新型能源的分布式智能微網系統的探索研究[J].能源研究與管理,2012(2):5-8.
[6] 朱蘭,楊秀.含多種分布式電源的微網系統的設計與仿真分析[J].華東電力,2011(10):1604-1607.
[7] 王成山,肖朝霞,王守相.微網綜合控制與分析[J].電力系統自動化,2008,32:98-103.
[8] WANG Cheng-shan, XIAO Zhao-xia , WANG Shouxiang. Synthetical control and analysis of microgrid[J].Automation of Electric Power Systems,2008,32(7):98-103.
[9] NIKOS H,ANTONIS T, JOHN V, KYRIAKOS P.Microgrids-largescale integration of micro-generation to low voltage grids[C]//SessionCIGRE 2006-International Council of Large Electric Systems. Paris, France, 2006:1-6.
[10] IEEE Std 1547TM-2003.IEEE standard for interconnecting distributed resources with electric power systems[S].
[11] PECAS LOPES J A, MOREIRA C L, MADUREIRA A G.Defining control strategies formicrogrids islanded operation[J].IEEE Transactions on Power Systems,2006,21(2):16-924.
[12] 王建,李興源,邱曉燕.含有分布式發電裝置的電力系統研究綜述[J].電力系統自動化,2005,29(24):90-97.
[13] 梁才浩,段獻忠. 分布式發電及其對電力系統的影響[J]. 電力系統自動化,2001,25(12):53-56.
[14] 王成山,王守相. 分布式發電供能系統若干問題研究[J]. 電力系統自動化,2008,32(20):1-4.
[15] 蔣偉. 微網接入配電網的保護控制關鍵問題研究[D].西南交通大學,2011.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34