伴隨衛星軌控時機與相對運動橢圓大小控制效率的關系
2013-09-19 00:51:22吳會英陳宏宇周美江慕忠成
載人航天 2013年5期
關鍵詞:方向
吳會英,陳宏宇,周美江,慕忠成
(上海微小衛星工程中心,上海,201203)
1 引言
隨著航天技術的發展,伴隨小衛星協助主航天器開展完成航天任務越來越受到人們的關注。伴隨小衛星一般搭載主航天器進入軌道,一段時間后從主航天器釋放,通過軌道機動形成伴隨飛行軌道[1-4]。由于伴隨衛星攜帶燃料較少,故而希望利用其既有資源以最大效率地進行軌道調整。在軌控量一定的情況下,控制時機和控制方向是軌控策略的核心。本文基于相對運動方程,在速度增量大小一定的前提下,對伴隨衛星最大效率軌道調整的控制時機和控制方向進行推導,并用仿真實例來驗證理論的正確性。最后以伴隨衛星從主星釋放后的軌道駐留為例,給出其燃料最省的軌控策略。
2 相對軌道控制理論
2.1 相對運動理論
伴隨衛星從主星釋放后協助主星開展航天任務,二者之間的距離相比其地心距很小(小于千分之一),可用相對運動理論進行研究。根據文獻[1]的推導結果,在主星軌道坐標系下,相對運動方程的解為:
主星軌道坐標系定義為:原點在主航天器質心,x軸徑向朝天,y軸在軌道面內垂直于x軸沿飛行方向,z軸符合右手法則。n為主星軌道角速度。
由相對運動方程的解可知,相對運動可分解為軌道面內和垂直于軌道面兩個獨立的運動,本文只研究軌道面內的相對運動情況。現引入參數b和φ角,使:
則(1)式可寫成如下參數形式:
其中,

參數解的幾何意義是一軌道面內長半軸為短半軸兩倍的沿跡方向漂移橢圓:

2.2 軌控時機對控制效率的影響
由上文推導可知,對伴隨衛星的軌道控制會改變相對運動橢圓的大小。由于伴隨衛星攜帶燃料有限,所以需要選擇合適的控制時機和控制方向,最大效率地改變相對橢圓的大小。當控制量為相對小量時,對(2)式求全微分,將(4)式代入可得:
設控制量v與y軸正方向的夾角為θ,則有ΔVy=vcosθ,ΔVx=vsinθ,那么:
其中θ0為引入的參數角,其計算表達式如下:
2.2.1 Δb取最大值時的控制時機和控制角度1)控制角度約束


由相對運動參數方程(4)式可知相對運動曲線的傾斜角φ滿足:

結合上面(10)式易知 tan θ=tan φ,θ=kπ +φ,即速度增量作用方向與相對運動方向平行;
小結:速度增量的作用方向與相對運動方向平行是最大效率地改變相對橢圓大小的必要條件。
2)控制時機約束
小結:在速度增量平行于相對運動方向的前提下,在相對橢圓徑向上、下點控制,對相對橢圓大小的改變效率最高。


小結:在速度增量平行于相對運動方向的前提下,在相對橢圓徑向中點進行控制,對相對橢圓大小的改變效率最小。
3)總結
平行于相對運動方向作用的速度增量對相對橢圓大小的改變效率最高。其中在相對橢圓上、下點作用的速度增量對相對橢圓大小的改變量最大,在相對橢圓徑向中點作用的速度增量對相對橢圓大小的改變量最小。沿相對運動方向作用的速度增量將增大相對橢圓,反相對運動方向作用的速度增量會減小相對橢圓。
2.2.2 Δb為零時的控制時機和控制角度
Δb=0 時,sin(θ+θ0)=0,θ+ θ0=kπ,θ0=kπ-θ,有:
tanθ0=-2tan(nt+φ)?tanθ=2tan(nt+φ)
而相對運動曲線傾斜角tanφ=-1/2cot(nt+φ),那么 tanφ ×tanθ=-1,即速度增量的作用方向與相對運動方向垂直。
小結:在相對運動橢圓的任意點作用與相對運動方向垂直的速度增量都不改變相對橢圓的大小。
2.2.3 結論
平行于相對運動方向作用的速度增量是最大效率改變相對橢圓大小的必要條件,其中在相對橢圓徑向上、下點作用速度增量對相對橢圓大小的改變效率最高;垂直于相對運動方向作用速度增量不改變相對橢圓的大小。為便于理解,用圖1~2來說明上述理論,其中綠色箭頭為相對運動方向,藍色箭頭為控制方向。
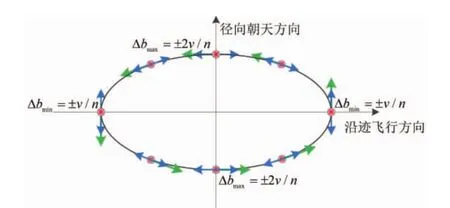
圖1 平行于相對運動方向控制Fig.1 Control direction is parallel to the relative movement
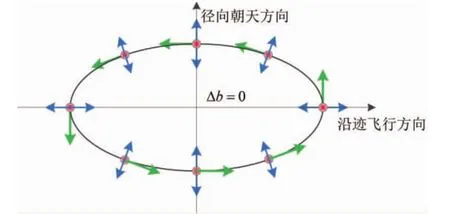
圖2 垂直于相對運動方向Fig.2 Control direction is horizontal to the relative movement
3 仿真實例
3.1 形成伴隨飛行橢圓
伴隨衛星釋放前搭載在主星上,軌道根數如表1所示。

表1 仿真初始軌道根數Table 1 Initial elements for simulation
初始時刻對伴隨衛星施加反沿跡方向0.2 m/s的速度增量,伴隨衛星從主星釋放。半軌(46分20秒)后再次施加沿跡方向0.2 m/s的速度增量,形成如圖3所示的伴隨飛行橢圓。橢圓中心(1.7,0),橢圓短半軸長0.708 km。仿真采用STK的HPOP模型[5],忽略攝動影響。
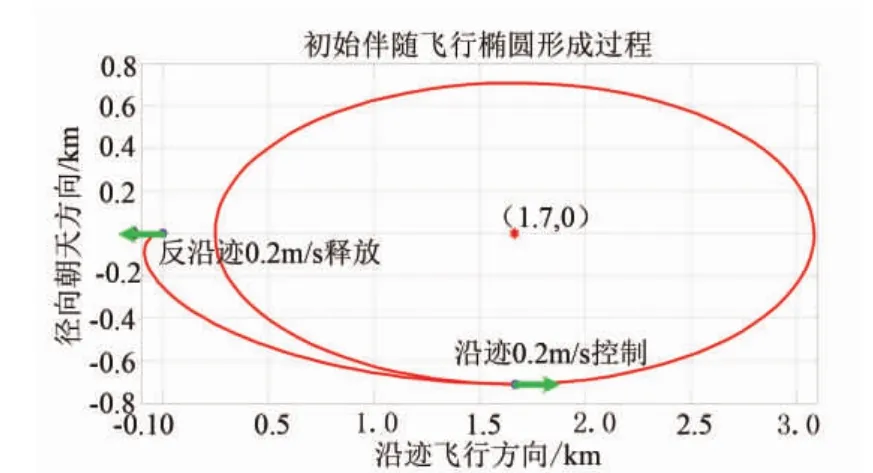
圖3 初始伴隨飛行橢圓Fig.3 Initial company flight ellipse
選擇圖4所示的特征點進行仿真驗算,其中紅色箭頭為相對運動方向,綠色箭頭為控制方向。
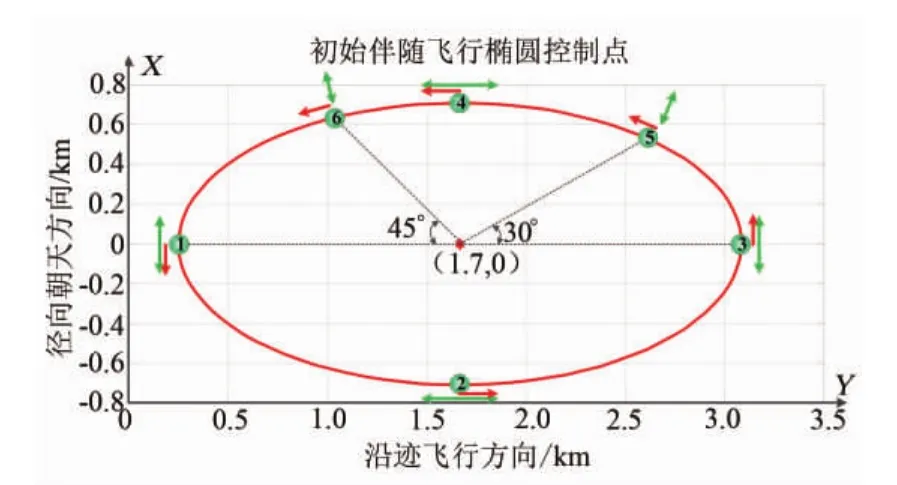
圖4 仿真控制點Fig.4 Controlling points of the simulation
3.2 特征點仿真
對控制點1~4施加圖4所示的速度增量,速度增量作用前后伴隨衛星在主星軌道坐標系下的運動曲線如圖5~8所示。其中紅色曲線表示原始繞飛橢圓,藍色曲線表示進行軌道機動后的繞飛橢圓。
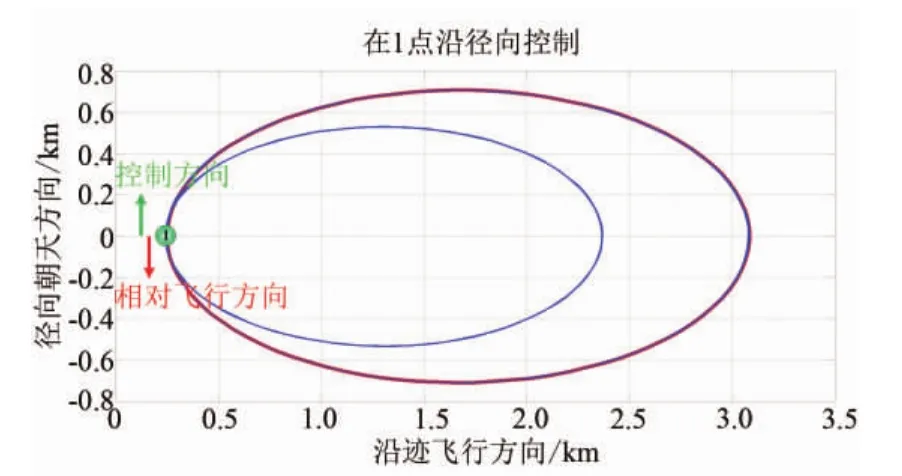
圖5 在1點沿徑向控制Fig.5 Curves for controlled at point 1
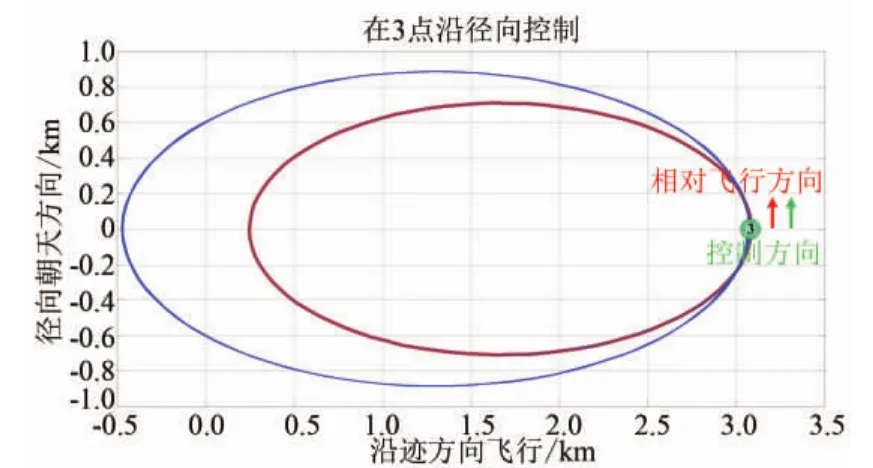
圖6 在3點沿徑向控制Fig.6 Curves for controlled at point 3
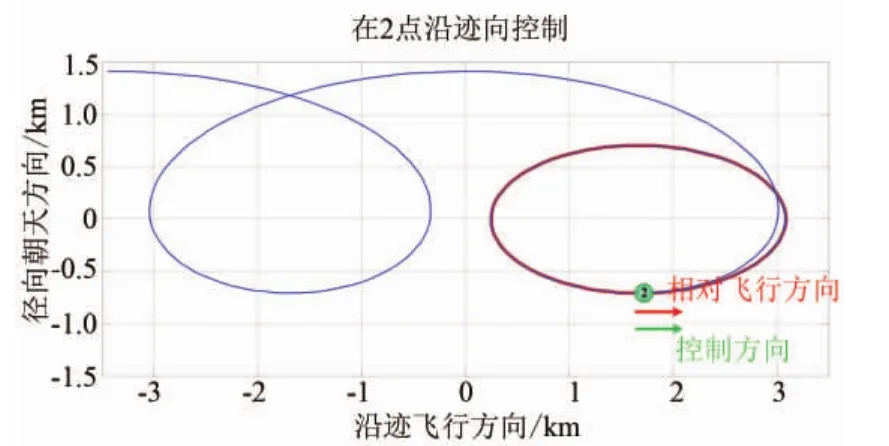
圖7 在2點沿跡向控制Fig.7 Curves for controlled at point 2

表2 平行于相對飛行方向控制仿真結果與理論結果對比Table 2 Comparisons between theoretical results and simulating results for the parallel control
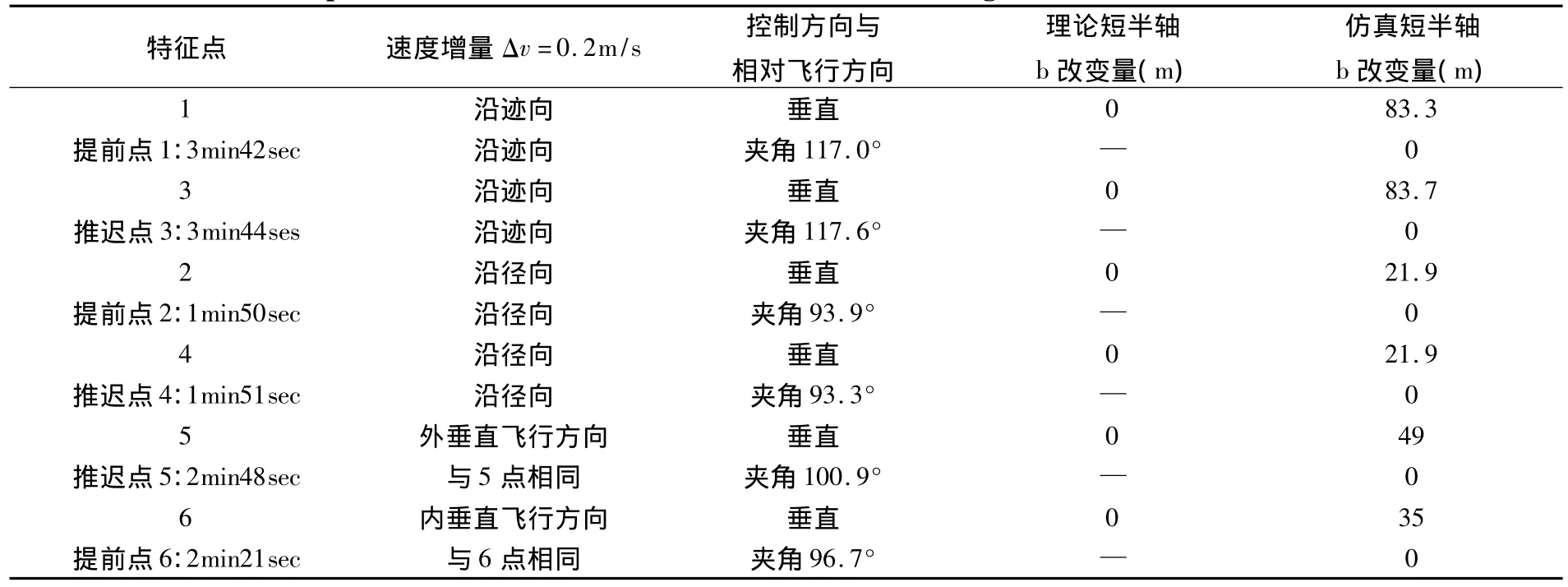
表3 垂直于相對飛行方向控制仿真結果與理論結果對比Table 3 Comparisons between theoretical results and simulating results for the horizontal control
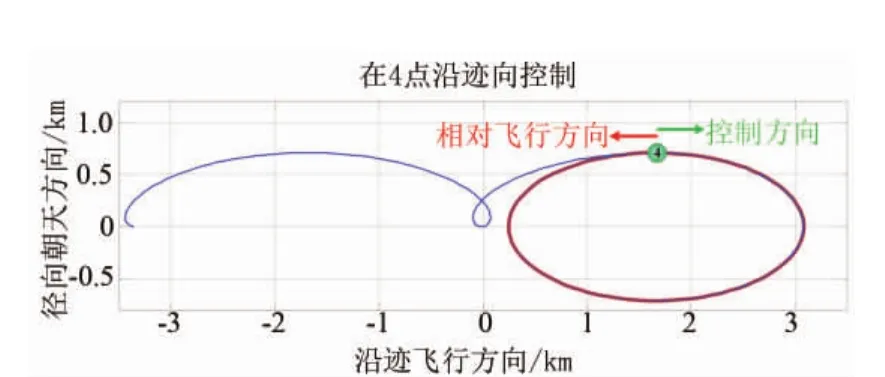
圖8 在4點沿跡向控制Fig.8 Curves for controlled at point 4
仿真結果如表2所示,其結果驗證了理論的正確性。
仿真中發現在控制點5、6垂直于飛行方向施加速度增量,相對橢圓大小的改變量不為零,但推遲或提前一定時刻,則可使改變量為零。對控制點1、2、3、4作用垂直于飛行方向的速度增量的仿真也出現這一現象,如表3所示。
出現這種情況的原因是:前面的理論是基于控制量為相對小量導出的,而本文仿真實例中,初始相對橢圓短半軸b=708 m,控制量引起的相對橢圓短半軸改變量Δb為10~102m量級,Δb相對b不為小量,需精確推導Δb的表達式。
設初始相對橢圓短半軸為b,控制量ΔVy、ΔVs使相對橢圓短半軸改變量為Δb,則有:
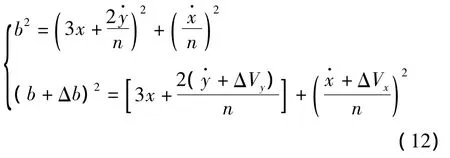
式(12)中的兩式相減,再代入式(4),可得:
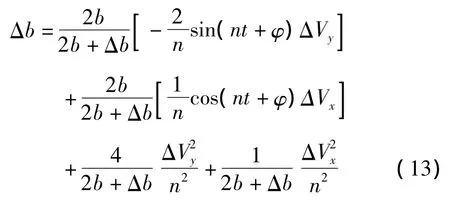
容易看出,當控制量引起的相對橢圓短半軸改變量Δb相對于初始相對橢圓短半軸b為小量時,(13)式忽略小量就是(7)式。
本文的仿真實例不能忽略小量,用(7)式近似表達Δb會導致理論計算與仿真結果有一定的偏差。但對特征點的仿真發現,垂直于相對運動方向控制體現出了這一偏差,而平行于相對運動方向控制理論計算與仿真結果一致,沒有體現出這一偏差。下面以控制點2和控制點3為例,對平行于相對運動方向控制和垂直于相對運動方向控制兩種情況,用(7)式近似表示Δb引起的偏差進行定量分析。
3.2.1 垂直于相對運動方向進行控制
1)控制點3:nt+φ =0°,ΔVy=0.2 m/s,ΔVx=0
由(13)式可知精確的相對橢圓短半軸改變量為,
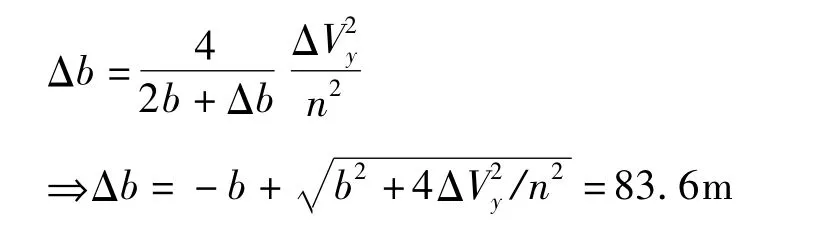
與表3中仿真結果Δb=83.7 m一致。
2)控制點2:nt+φ =270°,ΔVy=0,ΔVx=0.2 m/s
由(13)式可知精確的相對橢圓短半軸改變量為:
與表3中仿真結果Δb=21.9m一致。
3)其他特征點垂直于相對運動方向控制精確的相對橢圓短半軸改變量計算方法同上。
計算表明當控制量引起的相對橢圓短半軸改變量Δb相對于初始相對橢圓短半軸不為小量時,垂直相對運動方向的控制并非不改變相對橢圓短半軸長度的控制方式,近似表達導致的偏差可用上面的方法計算出來。
3.2.2 平行于相對運動方向進行控制
1)控制點3:nt+φ =0°,ΔVy=0,ΔVx=0.2 m/s
由(13)式可知精確的相對橢圓短半軸改變量為:

從公式(7)可知近似的Δb表達為:
近似表達與精確表達一致。
2)控制點2:nt+φ =270°,ΔVy=0.2 m/s,ΔVx=0
由(13)式可知精確的相對橢圓短半軸改變量為:
從公式(7)可知近似的Δb表達為:
近似表達和精確表達一致。
3)其他特征點平行于相對運動方向控制Δb的近似表達與精確表達也一致。
計算表明,即使控制量引起的相對橢圓短半軸改變量Δb相對初始相對橢圓短半軸b不為小量,但用近似表達進行分析,仿真結果也和理論結果吻合得很好。
3.3 燃料最省的軌道駐留軌控策略
以主航天器伴隨衛星的實際釋放為例,應用上面理論求解伴星與主星在同一軌道上并超前主星2 km以上駐留的軌控策略。伴星相對主星的釋放速度大小為0.5 m/s,釋放方向如圖9所示。

圖9 伴星釋放示意圖Fig.9 Release sketch of company satellite
由相對運動理論可知,伴星釋放后會形成相對主星的沿跡方向漂移橢圓,橢圓短半軸長由公式(2)計算可得b=462.20 m。
如果只做一次控制,需要在相對運動橢圓上與釋放點相同相位的點處施加與釋放速度增量大小相等、方向相反的控制,再考慮伴星超前主星2 km的條件,控制效果如圖10所示。
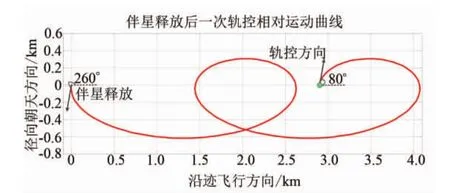
圖10 伴星釋放后一次軌控示意圖Fig.10 One-time orbit controlling curve after the company satellite released
根據本文的理論,可知圖10的一次控制其控制時機非效率最高,現分解為兩次控制:
1)第一次控制在相對運動橢圓徑向上點作用沿跡方向、大小等于Δv1=y·0的速度增量,以形成伴隨飛行橢圓,由(2)式可知此時相對橢圓短半軸減小:Δb1=153.72 m。
第一次控制效果如圖11所示,紅色曲線為從伴星釋放到第一次軌控的漂移橢圓,藍色曲線為第一次軌控后形成的伴隨飛行橢圓。
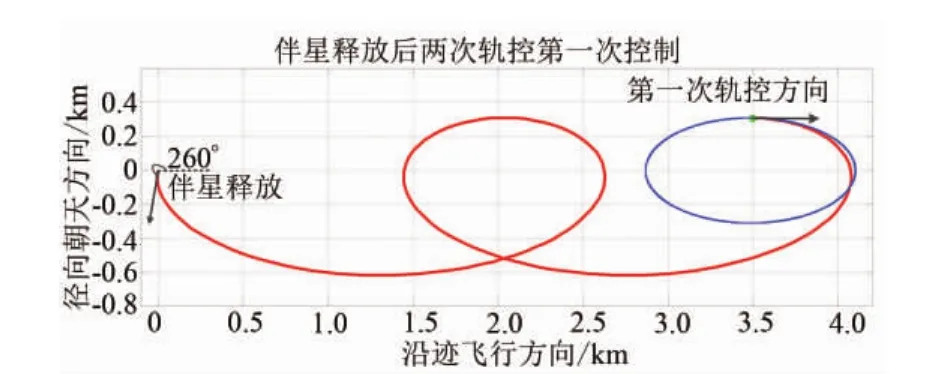
圖11 伴星釋放后兩次軌控第一次控制Fig.11 Curves of first control in two-time orbit control after the company satellite released
2)第二次控制在徑向中點作用沿徑向的速度增量,速度增量大小應恰好將當前的相對橢圓短半軸減小為零,以達到相對駐留,所以第二次控制的速度增量大小為:Δb2=0.34848 m/s。
第二次控制效果如圖12所示,綠色五角星為第二次軌控點,第二次軌控后伴隨衛星相對橢圓短半軸減小為零,相對主星在這個點駐留。
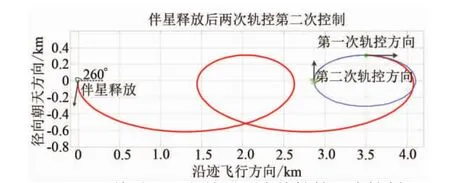
圖12 伴隨衛星釋放后兩次軌控第二次控制Fig.12 Curves of second control curves in two-time or bit control after the company satellite released
綜上所述,若只進行一次軌控,所需速度增量Δv=0.5 m/s;若進行兩次軌控,所需速度增量Δv=|Δv1|+|Δv2|=0.4553 m/s,小于一次控制所需速度增量,是燃料最省的軌控方案。
4 結論
本文通過理論推導和仿真結合的方法給出了伴隨衛星控制時機對于改變相對運動橢圓大小的效率的影響,證明了:平行于相對運動方向進行軌控是最大效率改變相對運動橢圓大小的必要條件,其中在相對運動橢圓徑向上、下點進行軌控的效率最高。以主航天器伴隨衛星的軌道駐留為例,應用這個理論求解了燃料最省并滿足約束的軌控方案。
[1] 郗曉寧,王威,高玉東.近地航天器軌道基礎[M].長沙:國防科技大學出版社,2003:193,247-250.
[2] 楊維廉.橢圓軌跡編隊飛行軌道分析[J].中國空間科學技術,2001,21(5):1-6.
[3] 黃美麗,向開恒.編隊飛行衛星相對軌道攝動運動分析[J].中國空間科學技術,2006,3(6):13-19.
[4] 張育林,曾國強,王兆魁,等.分布式衛星系統理論及應用[M].北京:科學出版社,2008:25-31.
[5] 丁溯泉,張波,劉世勇.STK在航天任務仿真分析中的應用[M].北京:國防工業出版社,2011:17.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50