約束條件下多運動體位置跟蹤魯棒控制算法研究
2013-09-19 00:51:18魏婷婷
載人航天 2013年5期
孟 長,胡 磊,魏婷婷
(電子科技大學航空航天學院,成都611731)
1 引言
近年來,作為多智能體協同控制的基礎,多智能體一致性跟蹤問題的分布式控制一直是控制領域的研究熱點[1-2]。文獻[3]考慮了智能體之間的通信具有的時延特性和互相干擾的情況。對于干擾,文獻[4]中提出了一種通過反饋對干擾進行補償的方法,文獻[5]和[6]詳細論述了利用干擾估計器抑制干擾,而文獻[7]將干擾估計器應用到一致性的問題中,卻沒有考慮執行器飽和的情況,也沒有給出干擾估計器參數的選擇對控制輸入的影響。
對實際工程系統來說,所有的執行機構都存在物理約束。在設計控制系統時,必須考慮有界的控制輸入對閉環系統性能的影響。如果不考慮這種約束來設計控制律,就很容易出現事故。另外,燃料的使用會使智能體的質量產生小幅度的改變從而改變對象特性,比如[8]中的火箭對接的重負載問題,加上外界不確定力或力矩的干擾,導致智能體的控制愈發困難。而控制器的設計中多使用位置傳感器和速度傳感器,這樣不僅加大了智能體的投入成本,同時引入了更多的干擾,因此提出一種無速度反饋并能抑制這些不確定因素的控制算法就變的很有意義。
本研究通過提出一種控制方案重點解決以下問題:1)在無速度反饋但存在干擾的情況下,結合干擾估計器提出一種有界的位置跟蹤算法;2)當執行器飽和值給定時,如何具體設置各項參數以滿足這種限制。
2 問題闡述
2.1 背景知識
2.2 數學模型和目標闡述
假設某個組隊由n個智能體組成,每個智能體的數學模型都是如下的雙積分模型:

其中,i∈In,ui∈R為第i個智能體的控制輸入,ri∈R,vi∈R分別代表第i個智能體的位置和速度。所謂一致性位置跟蹤分布控制就是對于任意一個智能體,如何設計其控制輸入ui∈R,以使得所有的智能體的位置信息最終達到一致,即是說當t→∞時,ri(t)→rj(t)→rd(t),其中rd(t)為參考位置信號。
本文將考慮兩個影響因素:質量變化和外界干擾。質量變化可以理解為,智能體燃料的變化所引起的智能體總質量的小幅抖動;外界干擾理解為智能體所受到的外界不確定干擾,數學模型作如下表述:

其中,i∈In,μi∈R表示第i個智能體的控制輸入,mi為質量常量,Δmi和Δfi分別表示質量低頻的小擾動和外界的未知干擾信號。為了分析的簡單性,令mi=1,整理式(2),得到:

3 控制算法的設計
3.1 穩定器設計
當di=0時,即針對模型(1),類比于[9]中提到的控制律,作如下改變:
其中,,kζ,ki都是正實數,當第i個智能體能夠獲得參考信號的信息時,bi>0;否則,bi=0。
定理1:對于模型(1),應用算法(4),假設,1)無向圖G是連通的;2)至少有一個智能體可以獲得參考信號的信息;3)參考信號的一階導數和二階導數和,存在且有界。如果參數k和ibi滿足下述關系:
本工程現已運行1年多的時間,運行過程中,尚未發現地表隆起、樁的變形,周邊地基土變形等現象,目前使用正常,表明本方案的合理性。

顯然,V大于零且無界。分別對其求時間的導數,得到下列關系式:
由文獻[10]中的引理3.1進一步得到
當di不為零時,針對模型(3),在控制算法(4)的基礎上,利用干擾估計器估算出干擾信號的估計值,從而在控制算法里進行補償,利用這種思想設計如下控制算法:

其中,ui為算法(4)所示的理想模型的控制算法為di的估計值,根據干擾估計器的原理,的拉普拉斯表達式滿足下列關系式=Q×di=Q(-μi)。根據式(4)和(7),進一步得到
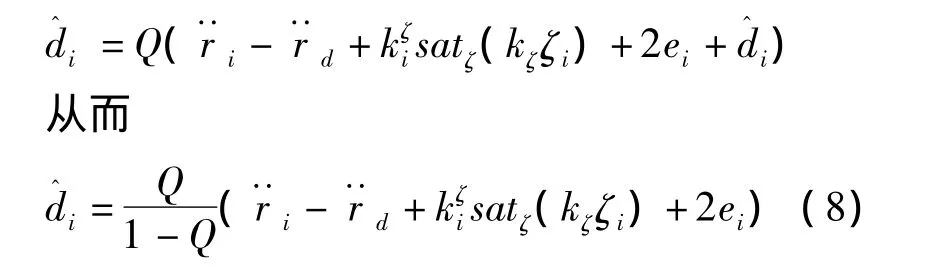
注意,雖然算法(8)中ui的選擇沒有速度反饋,但是此時中卻引入了速度信息。為了解決這個問題,選取此 時,=很容易看出這種方法既解決了無速度反饋的問題,又滿足了可實現性。
3.2 干擾誤差和有界性分析

定理2:假設di具有一階和二階導數,且有界,即存在正實數,使得||≤和||≤, 則


證明:解式(9)得:
因此,
顯然,當t趨于無窮時有:


即可滿足限制條件|μi|≤。
4 仿真結果
對于含有4個智能體的團隊,針對模型(3)和控制算法(7),假設它們之間的通信圖如圖1所示,并且權重為0.5。位置跟蹤信號為rd(t)=cos(t),對于i=1,2,3,4,ki=kζ=1,=0.5,總的干擾信號di=0.1sin(t),時間常數 τ =0.1,從仿真結果可以看出,控制算法(7)能夠很好的實現位置跟蹤,如圖2,并且從位置跟蹤誤差和干擾估計誤差看(圖3和圖4),算法對干擾的抑制能力得到體現,同時,控制輸入是有界的,如圖5。
圖1 通信拓撲圖Fig.11 Communication topology
圖2 位置跟蹤效果Fig.2 Position tracking response
圖3 位置跟蹤誤差Fig.3 Position tracking error response
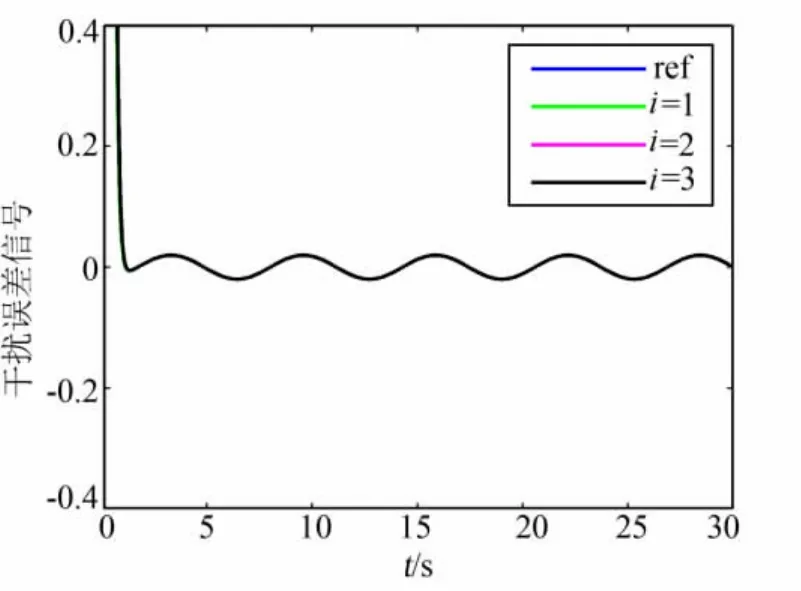
圖4 干擾估計誤差Fig.4 Disturbance estimate error
5 結論
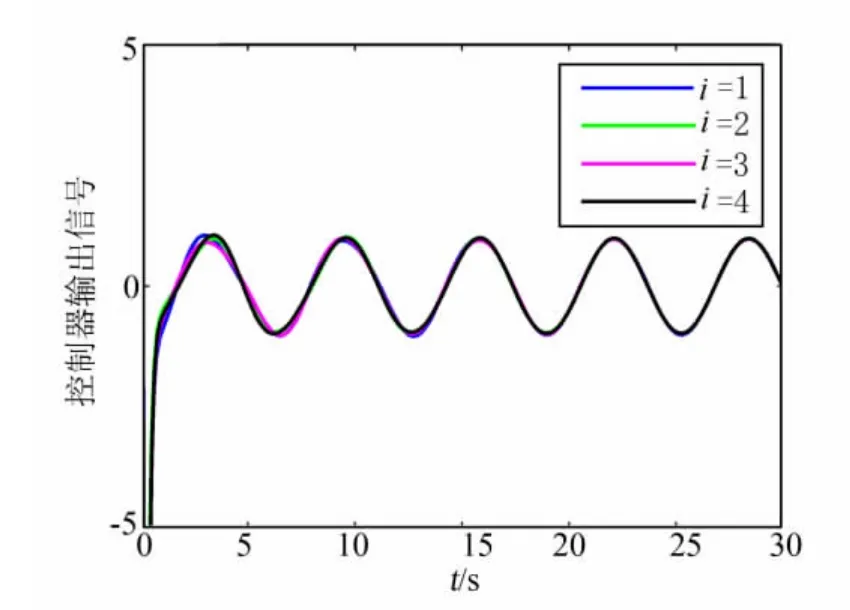
圖5 控制器輸出Fig.5 Output of the controller
本文利用干擾估計器設計了一種位置跟蹤的分布式多智能體控制算法,經過對干擾估計誤差的分析,證明了算法能夠出色地抑制干擾信號,同時達到無速度反饋下位置跟蹤的目的。對于執行器飽和的約束,給出了控制算法有界的證明,并且具體通過控制器參數的配置來達到控制算法滿足飽和約束的條件。
[1] Jadbabaie A,Lin J,Morse AS.Coordination of groups of mobile autonomous agents using nearest neighbor rules[J] Automatic Control,IEEE Transactions,2003,48(6):988-1001.
[2] Hong Y,Hu J,Gao L.Tracking control for multi-agent consensus with an active leader and variable topology[J] Automatica,2006,42(7):1177-1182.
[3] Lin P,Jia Y,Li L.Distributed robust H∞ consensus control in directed networks of agents with time-delay[J] Systems &Control Letters,2008,57(8):643-653.
[4] 王丹曄.載人運載火箭干擾在線補償制導方法研究[J]載人航天,2012,18(3):31-35.
[5] Talole SE,Phadke SB.Robust input-output linearisation using uncertainty and disturbance estimation[J] International Journal of Control,2009,82(10):1794-1803.
[6] Kuperman A,Zhong QC.Robust control of uncertain nonlinear systems with state delays based on an uncertainty and disturbance estimator[J] International Journal of Robust and Nonlinear Control,2011,21(1):79-92.
[7] Deshpande VS,Phadke SB.Control of uncertain nonlinear systems using an uncertainty and disturbance estimator[J]Journal of Dynamic Systems, Measurement, and Control,2012,134(2):024501.
[8] 劉竹生,張曙輝,容易.火箭在軌大尺寸、重負載交會對接技術研究[J].載人航天,2012,18(2):1-6.
[9] Zhu B,Sun W,Meng C.Position tracking of multi double-integrator dynamics by bounded distributed control without velocity measurements[C].American ControlConference(ACC),2013 Washington.DC,USA:IEEE,2013:4033-4038.
[10] Ren W.On consensus algorithms for double-integrator dynamics[J].IEEE Transactions on Automatic Control,2008,58(6):1503-1509.
[11] Chen T,Liu X,Lu W.Pinning complex networks by a single controller[J].Circuits and Systems I:Regular Papers,IEEE Transactions on,2007,54(6):1317-1326.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16