基于RSSI測距的交點質心定位算法研究與室內應用修正
2013-09-10 00:45:36葉萍張彥公安部第一研究所北京100048
自動化博覽 2013年3期
關鍵詞:模型
葉萍,張彥(公安部第一研究所,北京 100048)
1 引言
目前無線傳感器網絡節點定位技術主要分為兩大類:基于測距的定位機制和無需測距的定位機制。基于距離的定位方法需要建立測距模型用于測量傳感器節點間的距離,但與無需測距的定位方法相比,其定位精度更高。基于測距的定位機制,通過測量節點間的實際距離或方位來確定節點的位置,通常采用測距、定位和修正等步驟實現。這類定位算法主要有基于電波傳播時間(TOA)的定位、基于電波傳播時間差(TDOA)的定位、基于電波入射角(AOA)的定位、基于信號強度(RSSI)的定位等。基于RSSI測距由于只需要較少的開銷和較低的實現復雜度,成為近幾年室內定位研究的熱點。本文首先對基于RSSI的測距模型進行分析和參數優化,然后采用基于RSSI測距的交點質心法實現節點定位,并依據室內應用特點對交點質心法進行修正,最后通過應用證實了修正方法在室內環境低密度部署條件下能有效提高定位精度。
2 RSSI測距模型
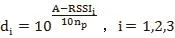
無線傳感器網絡中常用的無線信號傳播模型主要有以下3種:自由空間傳播模型(Free Space Propagation Model)、對數距離路徑損耗模型(Log-Distance Path Loss Model)、對數正態陰影(Log-Normal Shadowing Model)模型。自由空間傳播模型適用于發射節點(T)和接收節點(R)之間在完全無阻擋的視距路徑情況下的距離估計,而實際室內環境存在多徑、繞射、障礙物等干擾因素,模型計算值與實際有很大的變化。對數距離路徑損耗模型指出平均接收信號功率隨距離的變化呈對數衰減,此模型改善了自由空間傳播模型在實際環境應用中的諸多缺陷,但沒有考慮在相同的T-R距離情況下,節點位置的環境差異會對估算結果造成明顯差異。Shadowing模型在對數距離路徑損耗模型基礎上,依據測量數據的統計特性指出,特定位置的路徑損耗滿足隨機正態對數分布,即


3 測距模型參數優化
表1 環境參數經驗測量值

表1 環境參數經驗測量值
?


選擇室外(體育場空地)和室內(辦公室)兩種環境擬合測距模型參數。信號采樣時參考節點與移動節點保持在同一方向直線上,室外環境模型擬合度高(如圖1所示),其中黑點為采集的信號-距離點集,曲線為擬合模型:

實驗中發現,在室內環境下同一移動節點在相同位置接收到的RSSI具有一定的波動性,尤其在較遠距離情況下(如圖2所示)。為減少一次采樣的隨機性對參數擬合的影響,在利用測距模型估算距離前,先對接收到的RSSI值進行均值濾波處理,即為同一設備在同一位置n次采樣信號的平均值,濾波處理后室內環境擬合如圖3所示,曲線為擬合模型。
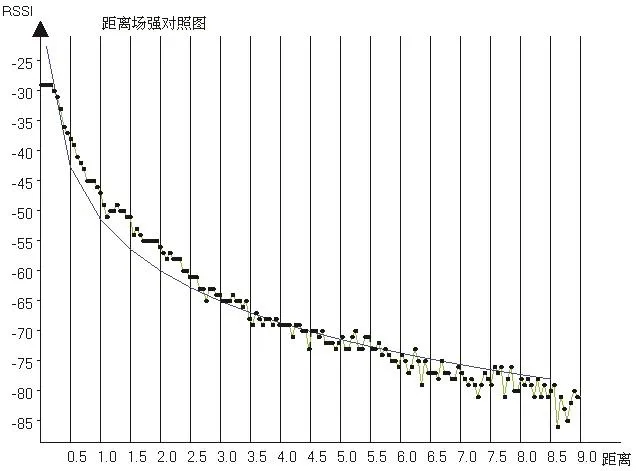
圖1 室外測距模型擬合
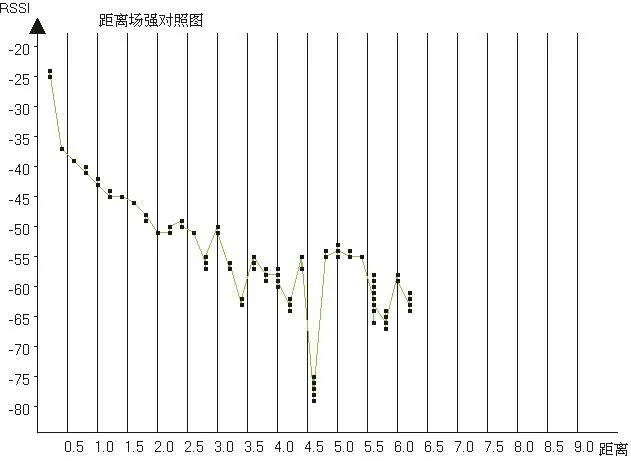
圖2 室內信號多次采樣
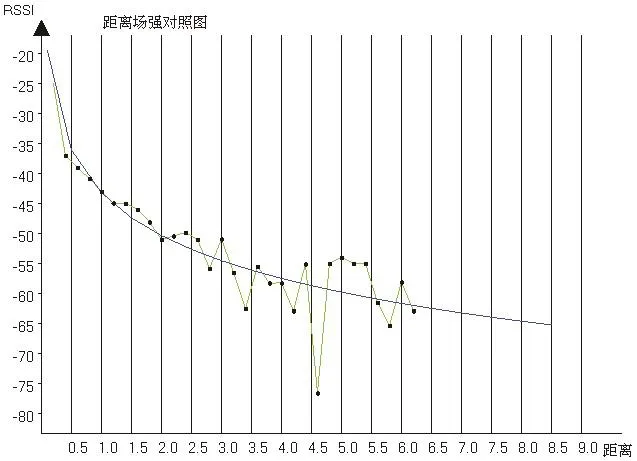
圖3 均值濾波后模型擬合

與室外環境對比可見室內環境下信號強度會出現毛刺現象,這是室內環境下信號受多徑、繞射、障礙物等干擾引起的。為平衡信號在特殊區域發生大波動給模型訓練造成的影響,實驗設計了3種信號采樣模式比較測距精度:(1)直線式:參考節點與移動節點保持在同一方向直線上;(2)十字交叉:在直線式基礎上增加垂直方向上的移動節點采樣;(3)散點式:移動節點在房間內部均勻分布采樣。
環境選擇室內小型辦公室,設備布局如圖4所示,檢驗點選擇1.6m×1.6 m 分布的30點。依據三種訓練方式分別計算三組模型參數并分別計算平均測距誤差(見表2),平均測距誤差定義為所有檢驗點估計距離與真實距離的誤差總和的平均值。測試結果表明采用散點式采樣訓練的模型精度較高。
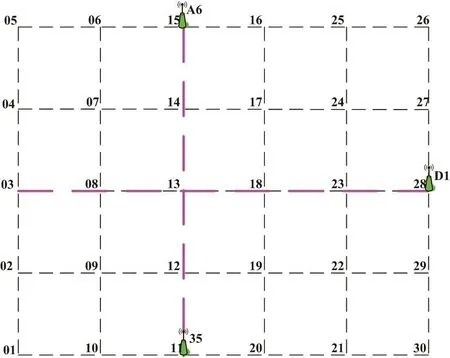
圖4 室內測距模型訓練布局
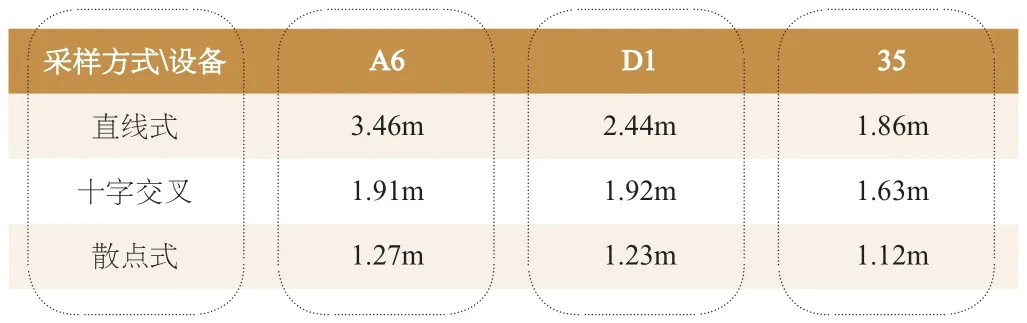
表2 三種采樣方式的平均測距誤差比較
4 交點質心定位算法
無線傳感器節點定位過程中,當移動節點獲得與鄰近的參考節點之間的距離信息后,通常采用以下原理估算位置:三邊測量法、極大似然估計法、極小極大法等。三邊測量法是一種基于幾何計算的定位算法,利用3個不同半徑的圓相交交點特性求解位置信息;極大似然估計依據最小二乘法求解n維坐標距離線性方程組來估算位置;極小極大法通過3個不同邊長的正方形相交區域質心特性求解位置信息。國外已有對三種方法的性能研究,結果表明在一定環境下(12m×19.5m范圍),極大似然估計法的計算量最大;參考節點小于10個時,極小極大法的計算量最小,在參考節點較少情況下,三邊法和極小極大法的精確度較高,而當參考節點超過6個時,極大似然估計法精確度更高。基于應用節點密度低、實時性強的需求,實驗選用了基于三邊測量法原理改進后的交點質心定位算法。
依據3個參考節點(信號強度最強的3個)的RSSI值和位置確定一個未知移動節點的位置,交點質心法步驟如下。設參考節點坐標為,,,移動節點接收到A、B、C三點的RSSI值為、、,利用測距模型估算移動節點到A、B、C的距離為
分別以A、B、C為圓心,d1、d2、d3為半徑畫圓,則移動節點應該出現在3個圓的公共區域內,移動節點的坐標(x,y)滿足

矩陣求解可得

依據交點質心法不論3圓是否兩兩相交,均可求得移動節點坐標的實數解。
5 室內應用下算法修正
在實際參考節點布控時,數量一般會超過3個,利用交點質心法定位選取信號強度最強的3個RSSI值。但在信號選取時發現,經常會有第3個信號強度與第4個信號強度區分度不高的情況出現。為避免單組RSSI計算位置造成定位偏差,選用信號強度最大的4個分成兩組(組合與組合),分別計算移動節點坐標,再求其平均。
依據較小傳輸距離內信號強且不易波動的特點,可為移動節點設置一個可信位置區域。假設強信號值設置為Filter(RSSI),測距模型在信號強度為Filter(RSSI)時對應的距離估計值為Filter(d),當接收信號強于Filter(RSSI)時,可認為移動節點位于以該參考節點為圓心,Filter(d)為半徑的圓內部,此時利用交點質心法估算坐標,如果位于限制區域外部時,可判斷估算坐標偏差較大,優化方法為強制調整估算坐標至限制區域邊界。
6 應用
實驗環境選擇8m×9m的室內大廳,大廳南側為落地窗臺,北側為走廊通道,東西側周邊均有障礙物。測距采樣點選擇1.6m×1.6 m 均勻分布的25點,檢驗點采用0.8m×0.8 m 均勻分布的81點,實驗設備選用5個參考節點(93、47、73、B7、96)和1個移動節點(D1),布控位置如圖5所示。
依據RSSI測距模型,選擇散點式采樣方法,對5個參考節點同時采樣,然后計算模型參數,擬合模型(如圖6所示)為:

圖5 實驗環境部署
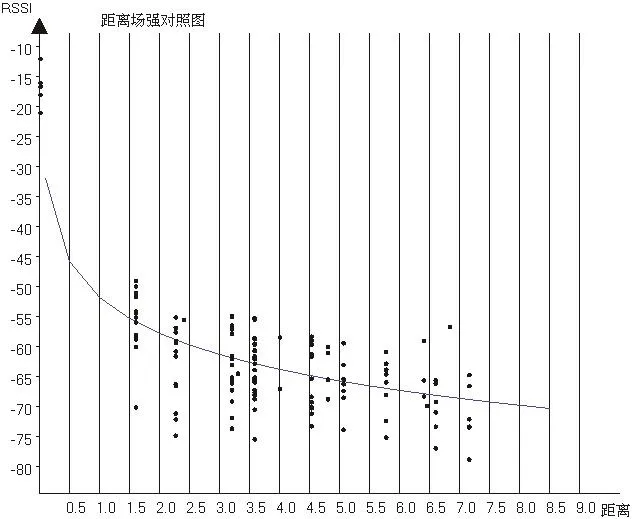
圖6 實驗環境測距

依據測距模型估計距離,對均勻分布的81點統計測距誤差,以設備47為例,平均測距誤差為0.90米(如圖7所示)。
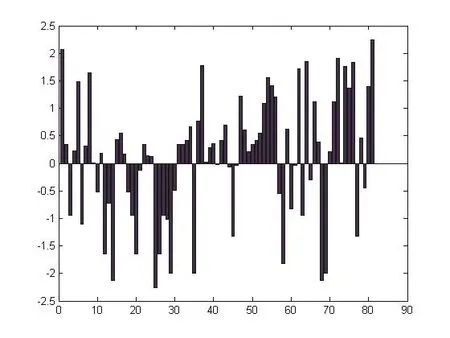
圖7 設備47的測距誤差
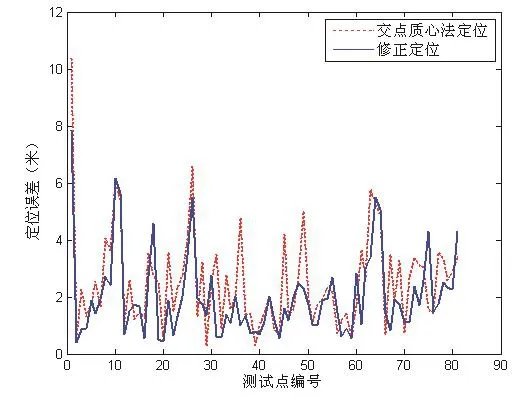
圖8 定位誤差對比
依據測距模型,用交點質心法估算移動節點坐標,設定Filter(RSSI)=-55.5dB,Filter(d)=1.5m,對81個檢驗點進行定位誤差統計,定位誤差定義為所有檢驗點估計位置到真實位置的歐式距離的誤差值,修正前后定位誤差對比見圖8和表3。從平均定位誤差和覆蓋率指標看,修正后的定位算法可有效提高定位精度。
7 結語
由于各種應用需求的差異性,無線傳感器網絡的定位至今還沒有形成公認的解決方案,目前的定位算法大都在定位精度、時間、能量、通信量等因素上作了折中考慮。本文重點研究了基于RSSI測距的交點質心定位算法,通過線性回歸、均值濾波、分散訓練等方法優化了測距模型,并依據室內應用特點對交點質心定位算法作了修正。應用結果表明,在室內環境低密度部署條件下,修正后的定位算法可在一定程度提高定位精度。

表3 修正前后誤差指標分析
[1]Ali S,Nobles P.A novel indoor location sensing mechanism for IEEE 802.11 b/g wireless LAN[c]∥IEE The Fourth Workshop on Positioning,Navigation and Communication(WPNC’07),2007:9-15.
[2]Theodore S Rappaport.Wireless Communications: Principle an Practice[M].2nd Edition. New Jersey: Prentice Hall,2002:69-138.
[3]朱明輝,張會清.基于RSSI的室內測距模型的研究[J].傳感器與微系統,2010,Vol.29,No.8.
[4]王偉,陳岱,周勇.基于測距修正和位置校正的RSSI定位算法[J].計算機工程與設計,2011,Vol.32,No.2.
[5]朱浩,顧宗海,蘇金,劉巖,章晨.一種基于交點質心求解的RSSI定位算法及其優化[J].鄭州大學學報(工學版), 2010,Vol.31,No.6.
[6]鄧琛,葉志群.基于無線傳感器網絡的低功耗室內定位系統[J].測控技術,2011,Vol.30,No.3.
[7]胡斌.基于RSSI量化模型的無線傳感器網絡定位技術研究[C].武漢理工大學碩士學位論文,2009.
[8]陳茂聰,田華.移動無線傳感器網絡定位算法研究[J].通信技術,2011,Vol.44,No.6.
[9]GOLDONI E,SAVIOLI A,RISI M,et a1.Experimental analysis of RSSI-based indoor localization with IEEE 802.15.4[C].2010 European Wireless Conference,2010:71-77.
[10]彭宇,王丹.無線傳感器網絡定位技術綜述[J].電子測量與儀器學報,2011,Vol.25,No.5.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
