海洋鋪管船用張緊器履帶機構運動學分析
2013-09-07 10:36:28張仕民楊樹松
石油礦場機械 2013年9期
孫 亮,張仕民,楊樹松
(1.中石化石油工程建設有限公司,北京100101;2.中國石油大學(北京)機電工程學院,北京102249;3.渤海石油裝備制造有限公司 研究院,天津300280)*
目前,我國海洋深水鋪管船用張緊器相關技術研究和產品開發還處于起步階段,經過對國外技術詳細調研和三維模型設計,已完成了張緊器的整體設計和張緊器內懸架的設計與分析[1-3]。船用張緊器履帶機構模型如圖1所示,由于張緊器的履帶機構與履帶式工程機械底盤差別很大,不能照搬履帶式機械行走機構的理論來進行運動學分析。本文在借鑒履帶式機械運動學理論的基礎上,對張緊器的履帶機構進行了運動學分析。
圖1 船用張緊器履帶機構模型
1 履帶的簡化和各段名稱
張緊器履帶機構運動學分析中的履帶,不是實際的真實履帶,而是一種簡化了的履帶。這種簡化的履帶是1條不可拉伸、無質量、無厚度、閉合的柔性帶。由于履帶是1條閉合的柔性帶,所以其形狀取決于張緊器驅動輪、引導輪、支重輪、托帶輪的相互位置和各輪半徑的大小[4]。為了便于說明履帶運行原理,可將履帶分成幾個區段(如圖2所示):1~3稱為驅動段;4~7稱為上支段;8~10稱為前方區段;10~1為下支段。
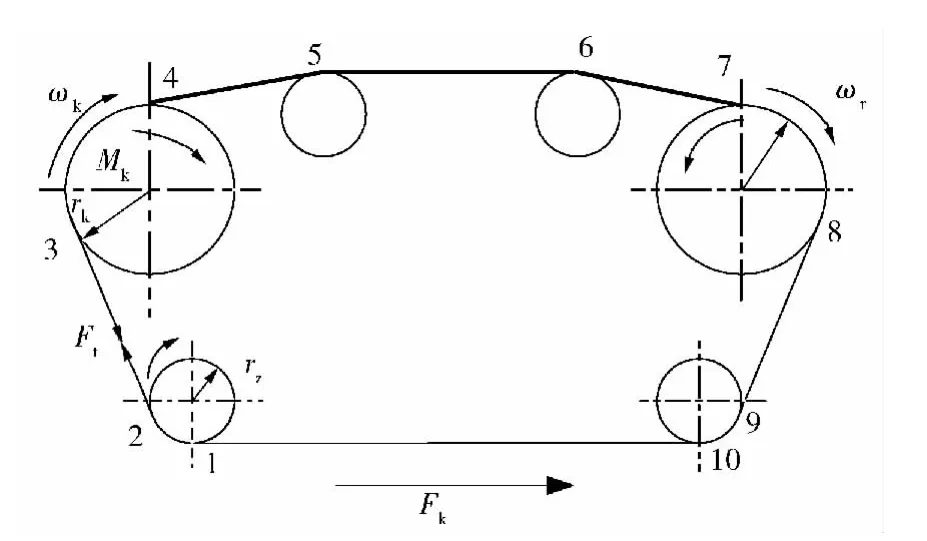
圖2 履帶各段名稱及運動原理
2 運動原理
如圖2所示,張緊器履帶機構運動時,在驅動力矩Mk作用下,驅動段內產生拉力Ft,Ft的大小等于驅動力矩MK與驅動輪動力半徑rk之比,即Ft=。拉力F是內力,它力圖把履帶下支段從支重t輪下拉出,致使管子表面對下支段的履帶板產生水平反作用力。這些反作用力的合力Fk稱作履帶機構的切線阻力。
為了分析切線阻力Fk是如何傳到履帶機構機體上的,可在驅動輪軸上加2個大小相等、方向相反的力Ft,如圖3所示。其中一個力與驅動段內拉力Ft形成力偶,其值等于驅動力矩Mk;另一個力則可分解成平行和垂直于管子表面的2個分力和其中=Ftcosα。同理,將作用在后支重輪上的2個力都分別移到該支重輪軸線上,結果得到1個合力F∑。將合力F∑分解成分別與管道軸向平行或垂直的2個分力和,而=Fk-Ftcosα。作用在履帶系統上的力應該是與之和,即

實際上,因為履帶銷和銷孔間有摩擦,故Fk比Ft要小些[5]。
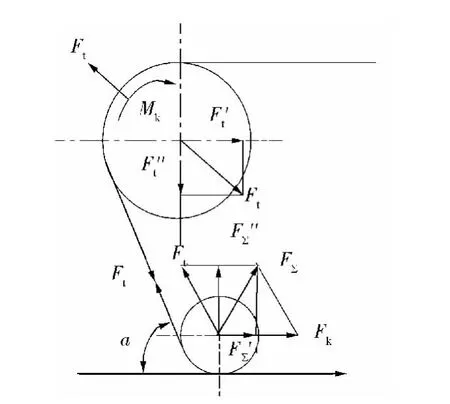
圖3 履帶切線阻力的傳遞
3 運動學分析
張緊器履帶機構夾持并鋪設管道的工作過程中,履帶要作復合運動。它一方面相對于管道作直線運動,這種運動速度是相對速度,以vq表示;另一方面,履帶又要作相對于履帶機體的繞轉運動,以vx表示。履帶上某一點的絕對速度用vj表示,vq、vx和vj間的向量關系為

履帶上各點的速度如圖4所示。由圖4可知,履帶上不同點的速度是不同的。當vq和vx不在同一直線上其夾角為α時,履帶上某點的絕對速度的代數式可表示為

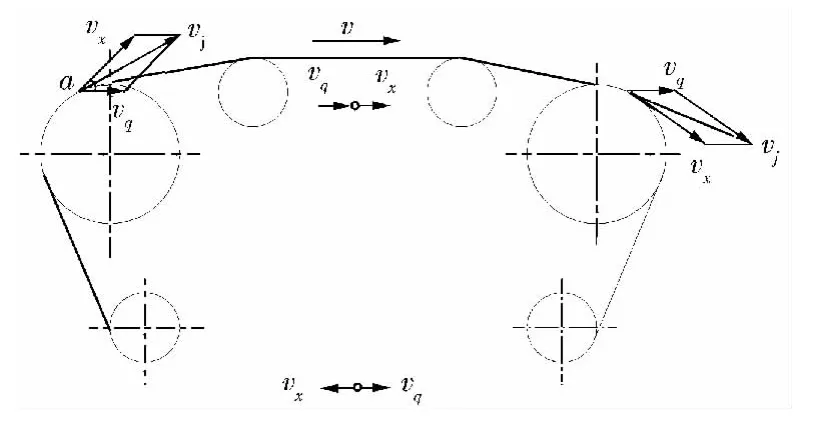
圖4 履帶上各點的速度
當上支段為水平直線時,vq和vx的夾角α=0°,式(2)變為

當下支段為水平直線時,vq和vx的夾角α=180°,式(2)變為

履帶與管道接觸的下支段是研究的重點,vq和vx的相互關系可分為以下4種情況:
1) 當vq=vx時,由式(4)得vj=0,說明履帶與管道接觸段的絕對速度等于零,履帶是靜止不動的。
2) 當vq<vx時,由式(4)得vj=vq-vx<0,說明履帶與管道接觸段的絕對速度小于零,為負值,即其絕對速度方向和履帶機構相對管道運動方向相反。這種情況叫做履帶接地段的滑轉,張緊器正常工作時,其與管道接觸的下支段都會產生部分滑轉運動。
3) 當vq>vx時,由式(4)得vj=vq-vx>0,說明履帶與管道接觸段的絕對速度大于零,為正值,即其絕對速度方向和履帶機構相對管道運動方向相同。這種情況叫做履帶下支段的滑移,張緊器制動時,其下支段就會產生部分滑移運動。
4) 當vq=0,vx>0時,由式(4)得vj=-vx<0,說明履帶與管道的接觸段的絕對速度小于零,為負值,履帶相對機體空轉,張緊器履帶并未接觸管道或接觸管道后未能拖動管道。這種情況是完全滑轉運動,也叫打滑。
滑轉和滑移的大小通常用滑轉系數表示,是指接地段的滑轉速度(vx-vq)和繞轉速度vx之比,以σ表示,即

在張緊器夾持管道正常的鋪管作業中,有vq<vx,由式(5)可知0<σ<1,這時履帶與管道接觸的下支段產生部分滑轉,這屬于履帶機構的正常運行階段。則履帶的實際運行速度vs為

在張緊器夾持管道進行鋪管作業中,若履帶與管道表面之間無滑轉時,即σ=0,則履帶的運行速度就等于鏈輪與鏈軌傳動時節圓的圓周速度,這時的履帶運行速度即為理論速度vT。即

式中:l0為鏈軌節銷孔的中心距離,m;z為驅動鏈輪的嚙合齒數;ωk為驅動鏈輪角速度,rad/s;n為驅動鏈輪的轉速,r/min。
綜上所述,履帶的實際運行速度即為履帶機構拖動管道進行鋪管作業的實際速度,可用式(6)表示[4,6-7]。
4 結語
對海洋鋪管船用張緊器履帶機構進行了分析,并介紹了履帶的簡化方法和各段的名稱。在借鑒履帶機構的基本理論基礎上,給出了張緊器履帶機構的運動原理,并對履帶機構進行了運動學分析。對其他規格張緊器履帶機構的分析有借鑒意義。
[1]曾 鳴,孫 亮,鐘朝廷,等.海洋鋪管船用張緊器內懸架的設計與分析[J].石油礦場機械,2010,39(6):32-35.
[2]楊 偉,葉 茂,何 寧,等.深水海底管道J型鋪設工藝及設備研究[J].石油礦場機械,2013,42(1):14-20.
[3]何 寧,徐崇崴,段夢蘭,等.J型鋪管法研究進展[J].石油礦場機械,2011,40(3):63-67.
[4]閆清東.坦克構造與設計(下冊)[M].北京:北京理工大學出版社,2007:74-78.
[5]吳永平,姚懷新.工程機械設計[M].北京:人民交通出版社,2005:23-24.
[6]秦四成.工程機械設計[M].北京:科學出版社,2003:46-48.
[7]Gianni Ferretti,Roberto Girelli.Modelling and simulation of an agricultural tracked vehicle[J].Journal of Terranmechanics,1999,36:139-158.
