基于連桿理論的裝載端口開門機構設計與運動學仿真
2013-09-07 09:42:46褚金錢
中國機械工程 2013年17期
褚金錢 徐 方
1.中科院沈陽自動化研究所機器人國家重點實驗室,沈陽,110016 2.中國科學院研究生院,北京,100049
0 引言
集成電路制造業的特點是超精密化、超潔凈環境和細微化,加工工藝涉及近百道工序,其中有許多重要的工藝環節需要在真空環境下完成。加工過程中,硅片需要在生產線上不同的工藝加工模塊之間進行高效的傳輸和定位,半導體設備前端模塊(equipment front-end module,EFEM)是完成這一任務的關鍵裝備。
裝載端口由支撐系統(符合BOLTS—M標準)、開盒裝置、映射定位系統等組成,其主要功能是通過開盒裝置實現晶圓盒的開門動作,同時映射定位系統掃描晶圓盒里的晶圓位置信息,并將此位置信號反饋給半導體設備前端模塊的控制系統。
目前,國外科研單位主要從事裝載端口的晶圓盒夾緊機構、晶圓盒門的吸附方式和開鎖機構、晶圓掃描的算法優化等方面研究,對裝載端口開盒裝置和映射定位系統的驅動機構的研究相對較少,且主要采用傳統的氣缸驅動方式。該驅動機構需要3個氣缸來執行動作,具有氣缸數量多、占用空間大、動作復雜、不易控制等缺點。
根據裝載端口開盒裝置和映射定位系統動作執行的功能需求,筆者運用結構設計的型綜合理論,將平行四連桿機構和曲柄滑塊機構串聯起來作為裝載端口開盒裝置、映射定位系統的驅動機構。利用MATLAB仿真組件中的SimMechanism模塊建立機構運動學仿真模型,得到開盒裝置的運動軌跡,并將其與傳統機構仿真模型的運動特性曲線進行比較。
1 建立傳統結構的Simulink模型
EFEM主要包括支撐殼體、操作機械手(安裝有校平螺釘)、機械手移動單元、預對準器、裝載端口組件等,裝載端口組件是EFEM中非常關鍵的部分,如圖1所示。
目前,國內對EFEM的研究基本上處于起步階段,半導體生產線的自動化設備(如裝載端口)幾乎都靠引進國外產品,因此對其研究就顯得非常重要。
如圖2所示,傳統結構的裝載端口采用對射式光纖傳感器,由3個氣缸分別驅動開盒裝置和映射定位系統運動。在運動形式上,它們包括1個沿豎直方向的直線運動和2個繞支點A的旋轉運動。運用 MATLAB中的Simulink/Sim-Mechanism建立機構運動的模型(圖3),根據傳統結構中開盒機構和映射定位系統動作執行的工作空間要求來設置模型中機構的相關參數。
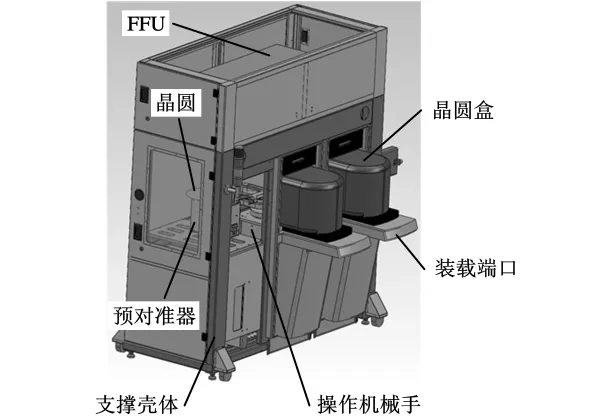
圖1 EFEM結構圖
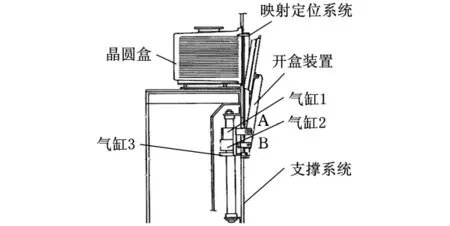
圖2 傳統的裝載端口結構圖[1]
根據機械手抓取晶圓的工作空間要求,設置Simulink模型中的控制信號(圖4)來保證執行機構準確地模擬運動軌跡。開盒裝置的運動軌跡由1個繞支點A的轉動和1個沿豎直方向的移動共同實現,故只需2路位移控制信號。圖4中的Y1、Y2為裝載端口的2路位移控制信號(分別驅動門繞支點的轉動和沿豎直方向的升降)。通過微分模塊對這2路位移信號進行一次微分、二次微分處理就可以獲得與之對應的速度曲線、加速度曲線,然后用Mux模塊合成位移信號、速度信號和加速度信號,并以此作為仿真模型的控制信號來驅動機構運動。因為MATLAB工作空間中只能處理n×2(行數為n,列數為2)的矩陣,即我們需要對位移曲線信號進行矩陣運算后才能把它作為激勵信號輸出到SimMechanism模型中。
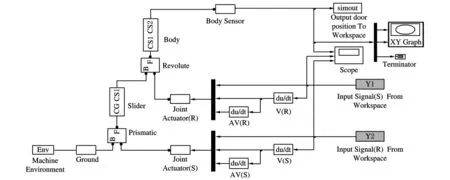
圖3 傳統結構的裝載端口模型圖
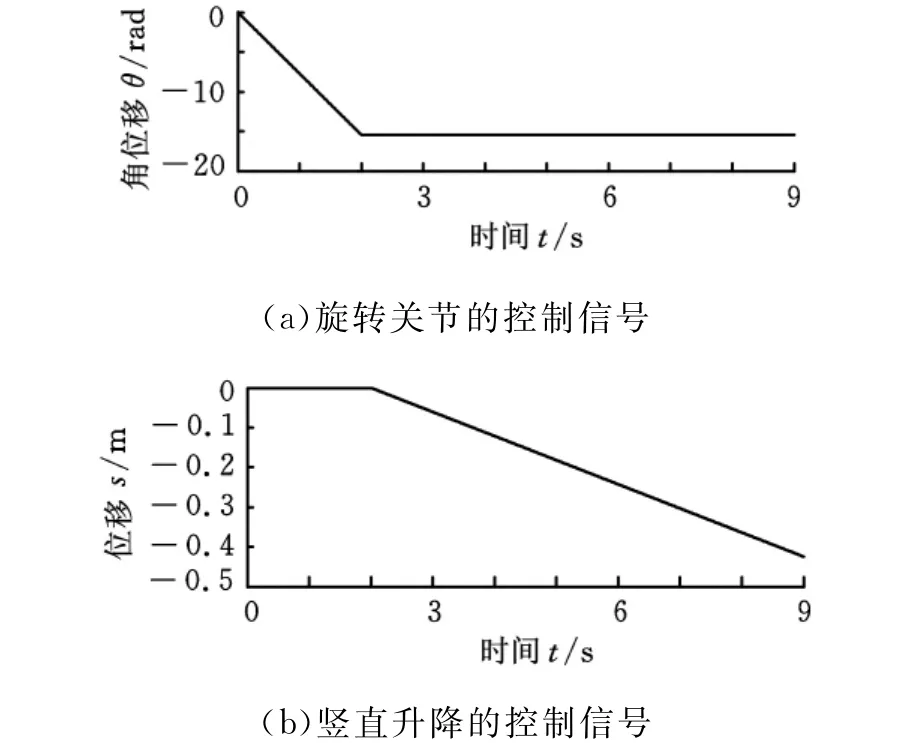
圖4 位移控制信號
2 基于連桿理論的Simulink模型
如圖2所示,裝載端口的開門機構主要用來執行晶圓盒門的開啟、關閉操作,驅動映射定位系統的對射式光纖傳感器沿豎直方向移動來獲取晶圓盒里的晶圓位置信息。晶圓盒門開啟后,開門機構執行如下動作:驅動晶圓盒門下降至映射定位系統起始位置處→映射定位系統向前運動伸進晶圓盒內→驅動映射定位系統掃描晶圓盒里的晶圓位置信息→映射定位系統機械手做縮進運動退出晶圓盒→驅動晶圓盒門下降至完全開啟位置處。至此開門機構完成整個開門動作。反之,按照逆序執行該流程來完成關門動作。
在設計開門機構時,要求開門機構能執行晶圓盒門的開啟、關閉操作并驅動映射定位系統掃描晶圓盒里的晶圓位置信息。上述任務過程執行中,要求相關操作能夠有序、準確進行,各種動作之間不會相互干涉,能滿足各動作的執行精度要求,且具有很好的柔順性,以便完成晶圓的工藝處理過程。與此同時,開門機構相對整個裝載端口具有嚴格的位置要求,即當被放置在裝載端口前端運動平臺上的晶圓盒移動至分界面處時,開門機構在開啟位置處能夠吸附晶圓盒門,同時,連桿機構在其工作空間范圍內能順利執行開啟、關閉操作,并保證映射定位系統能夠掃描整個晶圓盒里的晶圓。
基于連桿理論的裝載端口改變傳統結構設計中的對射式光纖傳感器,采用反射式激光傳感器。運用機構設計的型綜合方法,將平行四連桿機構和曲柄滑塊機構串聯起來作為裝載端口的驅動裝置,只需1個氣缸驅動機構運動。在運動形式上,開盒裝置(由平行四連桿機構驅動)的運動可分解為豎直運動和水平運動,映射定位系統的運動是曲柄滑塊結構的滑塊沿豎直方向的直線移動。
在設計開門機構時,對其初始狀態位置、開門狀態位置及工作區域都有嚴格限制,工作空間具體要求如圖5所示。

圖5 位置要求示意圖
2.1 解析法分析裝載端口的運動特性
為了研究整個機構的運動特性,采用復數矢量法[2]進行機構的運動分析(為便于解析法分析,我們將組合連桿機構的運動簡圖沿逆時針方向旋轉90°)。以O為坐標原點建立圖6所示的直角坐標系,取逆時針方向為正方向,CH=a(a為門的目標點與連桿鉸接點的距離)。該平面連桿機構由曲柄滑塊機構OCE和平行四連桿機構OBCD串聯組合[3],桿DG為外部驅動源。在該坐標系下建立機構的位置方程,根據位置方程對時間分別求一次導數和二次導數,得出機構的速度和加速度方程,解出有關桿件的位置、速度和加速度,從而完成機構的運動學分析。平行四連桿機構OBCDG[4]的運動分析如下。
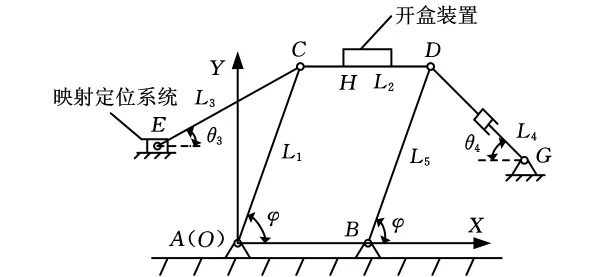
圖6 組合連桿機構分析圖
2.1.1 基于D點建立函數關系
(1)位置分析。建立圖6所示的直角坐標系,其中l1為桿AC的長度,l2為桿CD的長度,l4為桿D G的長度,φ為桿AC與X軸的夾角,θ4為DG與X負向的夾角,(xG,yG)是G點在直角坐標系OXY中的坐標。根據桿件的位置關系,列出投影方程:
X方向

Y方向

故可以求得


故可以求得
2.1.2 基于H點建立函數關系
(1)位置分析。建立如圖6所示的直角坐標系,根據桿件的位置關系,列出投影方程:X方向

Y方向


2.1.3 曲柄滑塊機構OCE[5]的運動(基于E點建立函數關系)分析
(1)位置分析。建立如圖6所示的直角坐標系,(xE,yE)是E點在直角坐標系OXY中的坐標,θ3為桿EC與X正向的夾角。根據桿件的位置關系,列出投影方程:
X方向

Y方向

由式(11)代入式(10)可得


故可以求得
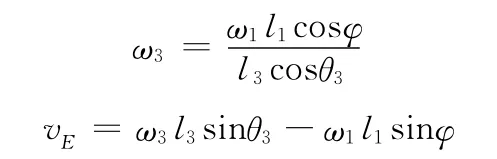
(3)加速度分析。對式(10)、式(11)進行二次求導(aE為滑塊E的加速度),解方程可以得到
2.2 建立裝載端口的Simulink模型[6-8]
根據Semi標準[9]要求設計裝載端口的開門機構,準確安裝在裝載端口合適位置處。結合開門機構的工作原理,分析并繪出該開門機構的運動簡圖,確定各桿件的尺寸參數:OB=CD=320mm,OC=BD=202mm,映射定位系統的反射式激光傳感器在圖6所示坐標系位置坐標E(-75mm,72mm)。利用 MATLAB中的Simulink/SimMechanism模塊建立機構運動的模型圖(圖7)。
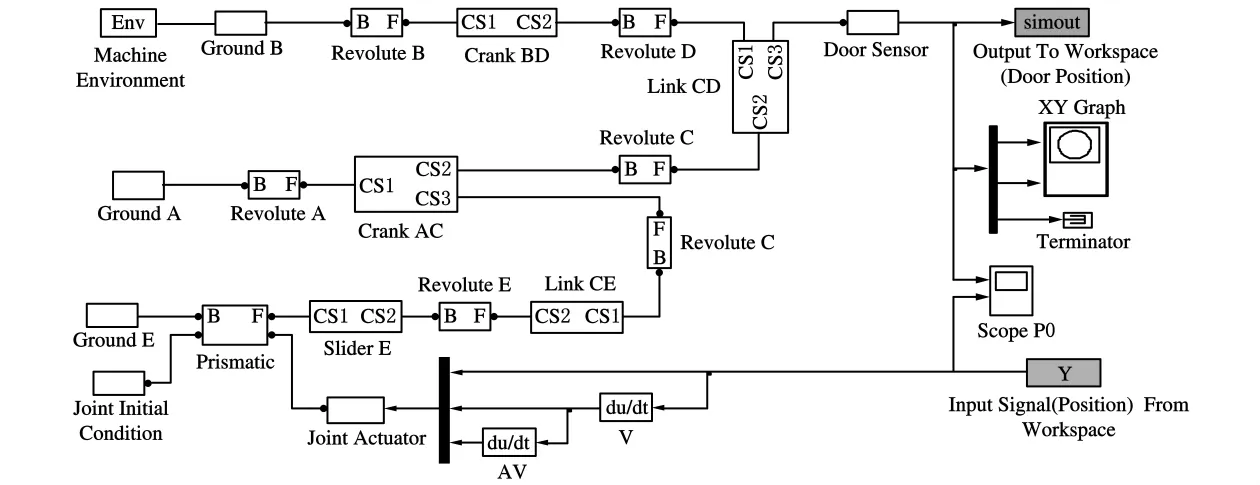
圖7 裝載端口模型圖(基于連桿理論)
根據機械手抓取晶圓的工作空間要求,設置Simulink模型中的控制信號(圖8),以保證執行機構能準確地模擬運動軌跡。圖7中,Y為裝載端口的位移控制信號,用來驅動串聯機構運動。
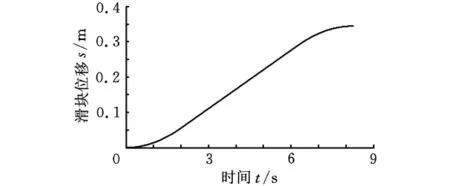
圖8 位移控制信號
3 仿真結果分析
搭建裝載端口模型后,Simin模塊將工作空間workspace中的速度信號輸入到仿真模型,為控制系統提供激勵信號。由Joint Actuator模塊驅動機構運動,以保證裝載端口能夠準確地執行開盒動作和晶圓的映射定位功能。仿真過程中,加載在目標點處的Joint Sensor模塊輸出相關運動學特性信號(如位移、速度、加速度等),考慮到基于連桿理論開門機構的軌跡曲線直接影響到該機構設計的可行性,因此論文重點分析比較設計機構的軌跡曲線與傳統機構的軌跡曲線。通過建立裝載端口的仿真模型、動態模擬設計機構的裝載過程和卸載過程,形象直觀地再現裝載端口的動作流程,并輸出開盒裝置運動的軌跡曲線,如圖9、圖10所示,設計機構中滑塊的速度、加速度曲線如圖11、圖12所示。大,過渡過程平穩,且加速度控制在30mm/s2以內,能更好地執行開盒動作和映射定位掃描動作,有效減小周圍氣流擾動并獲得Semi標準中所需的 Mini環境(Class 1000)。
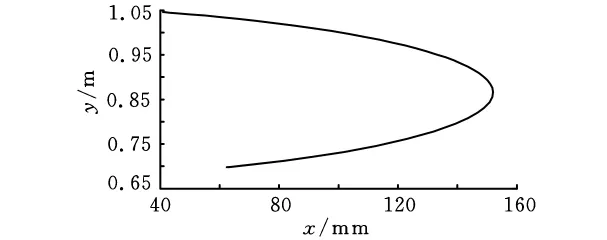
圖9 連桿理論的軌跡曲線
4 結語
本文采用機構設計的型綜合方法將平行四連桿機構和曲柄滑塊機構串聯起來,為裝載端口開盒裝置、映射定位系統提供動力驅動,是裝載端口組件設計中的一種創新思路。通過MATLAB的Simulink/SimMechanism模塊建立仿真模型,獲得開盒裝置運動的軌跡曲線,其運動學特性符合半導體設備前端模塊的動作需求和工作空間要求,對裝載端口設計具有一定的工程指導意義。
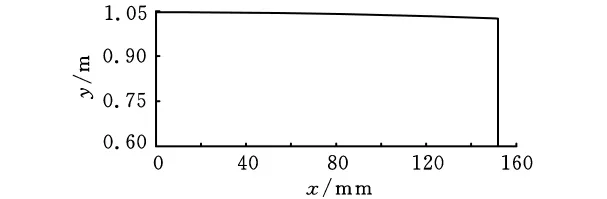
圖10 傳統的軌跡曲線
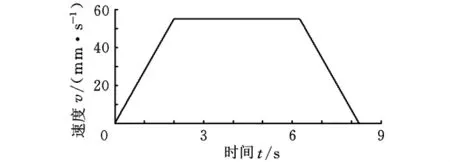
圖11 滑塊的速度曲線
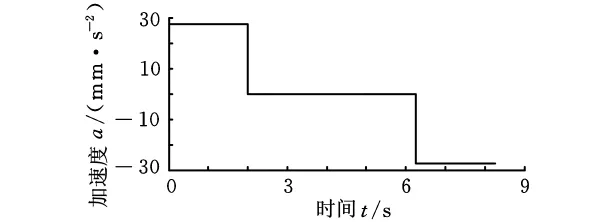
圖12 滑塊的加速度曲線
設計時,將裝載端口布置在半導體設備前端模塊內合適位置處,運用Solidworks動態模擬開門機構的執行過程。結果表明,基于連桿理論開門機構的運動軌跡在EFEM可允許的空間范圍內且不會對其他設備產生運動干涉。
基于連桿理論設計的機構只需1路控制信號,這樣就能很好地優化開門機構的運動軌跡。通過規劃控制信號,可以使滑塊的速度達到55mm/s,加速度控制在30mm/s2以內,能更好地避免傳統機構中的加速沖擊等問題。
通過與傳統機構的運動曲線比較,我們不難看出,基于連桿理論的軌跡曲線起始段曲率半徑
[1]Jun Emoto,Takeshi Kagaya,Kazuo Yamazaki.Wafer Processing Apparatus Having Wafer Mapping Function:USA,US6795202B2[P].2004-09-21.
[2]陳劍,葛文杰,王軍強,等.平面四連桿機構參數化設計與運動仿真研究與實現[J].現代設計與先進制造技術,2010,39(9):23-25.Chen Jian,Ge Wenjie,Wang Junqiang,et al.Planar Four-bar Linkage Parametric Design,Motion Simulation and Realization of Modern Design[J].Advanced Manufacturing Technology,2010,39(9):23-25.
[3]田發達,姚養無,武俊明.平面組合連桿機構設計與運動學仿真[J].機械工程與自動化,2010(4):40-45.Tian Fada,Yao Yangwu,Wu Junming.Plane Combination of Linkage Design and Kinematic Simulation[J].Mechanical Engineering and Automation,2010(4):40-45.
[4]郭飛,韓冰.基于Matlab的曲柄搖桿機構運動學仿真[J].煤礦機械,2006,27(7):45-46.Guo Fei,Han Bing.Crank-rocker Mechanism Kinematics Simulation Based on Matlab[J].Coal Mining Machinery,2006,27(7):45-46.
[5]耿其東,方志國.偏置式曲柄滑塊機構仿真與運動分析[J].機械工程與自動化,2011(3):49-53.Geng Qidong,Fang Zhiguo.Crank Slider Mechanism Simulation and Motion Analysis[J].Mechanical Engineering and Automation,2011(3):49-53.
[6]高道祥,薛定宇.基于Matlab/Simulink機器人魯棒自適應控制系統仿真研究[J].系統仿真學報,2006,18(7):2022-2025.Gao Daoxiang,Xue Dingyu.Matlab/Simulinkbased Robot Robust Adaptive Control System Simulation[J].Journal of System Simulation,2006,18(7):2022-2025.
[7]王春香,丁紅,宋曉峰.平面連桿機構的高效可視化運動仿真研究[J].煤礦機械,2007,28(7):71-73.Wang Chunxiang,Ding Hong,Song Xiaofeng.Efficient Visualization of Planar Linkage Movement Simulation[J].Coal Mining Machinery,2007,28(7):71-73.
[8]吳覺士,仲梁維.基于 Matlab-Simulink的四缸內燃機曲柄連桿機構仿真和動力學分析[J].機械傳動,2007,31(1):34-36.Wu Jueshi,Zhong Liangwei.Four-cylinder Engine Crank Linkage of Matlab-Simulink-based Simulation and Dynamics Analysis[J].Mechanical Transmission,2007,31(1):34-36.
[9]The Global Physical Interfaces & Carriers Committee.SEMI E15.1-0600-2000Specification for 300mm Tool Load Port[S].Washington,D.C.:SEMI North American Regional Standards Committee,2000.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
