自主移動機(jī)器人避障算法研究及展望
2013-09-03 10:51:22張玉婷鄒彤雯王艷麗任濱僑
黑龍江科學(xué) 2013年7期
張玉婷,鄒彤雯,王艷麗,任濱僑
(黑龍江省科學(xué)院高技術(shù)研究院,哈爾濱150020)
自主移動機(jī)器人是機(jī)器人研究領(lǐng)域的核心內(nèi)容之一,其研究集中體現(xiàn)了一個國家自動化、智能化研究水平的高低,它的研究跨機(jī)械、電子、通信等多學(xué)科、多領(lǐng)域。自主移動機(jī)器人綜合運用傳感器技術(shù)、信息處理技術(shù)、無線通信技術(shù)、機(jī)電一體化技術(shù)等前沿科技。隨著科學(xué)技術(shù)的不斷發(fā)展,移動機(jī)器人技術(shù)也在日新月異,可以說,移動機(jī)器人的研究水平是一個國家科技發(fā)展水平、國防工業(yè)技術(shù)的高度體現(xiàn)[1-2]。
1 自主移動機(jī)器人的關(guān)鍵技術(shù)
自主移動機(jī)器人研究,涉及信息融合技術(shù),通信技術(shù),機(jī)電一體化技術(shù)等領(lǐng)域,而且隨著研究的不斷深入,會有更多的新技術(shù)得到應(yīng)用。自主移動機(jī)器人研究領(lǐng)域應(yīng)用較為廣泛的技術(shù)有:
結(jié)構(gòu)體系優(yōu)化技術(shù)。采用分布式結(jié)構(gòu)可以提高移動機(jī)器人的實時性和準(zhǔn)確性。
多傳感器信息融合技術(shù)。單一傳感器的應(yīng)用只能獲取單一的外部信息,這就要求把多種類、多數(shù)量的傳感器綜合起來應(yīng)用,對多個傳感器讀取的信息數(shù)據(jù)加以融合,以期得到準(zhǔn)確的環(huán)境信息,從而建立精確的外部環(huán)境模型[3]。
導(dǎo)航與定位技術(shù)。在機(jī)器人運動過程中,定位分為兩種,一種是全局定位,一種是機(jī)器人姿態(tài)定位[4],全局定位是機(jī)器人在起始點與目標(biāo)點之間的位置確定;姿態(tài)定位是確定移動機(jī)器人導(dǎo)航角和相對于坐標(biāo)原點的距離。
2 自主移動機(jī)器人避障算法
在移動機(jī)器人的運動過程中,機(jī)器人能否主動避開前方的障礙物,尋找出一條到達(dá)目標(biāo)點的安全路徑,是機(jī)器人能否實現(xiàn)自主作業(yè)的關(guān)鍵,直接影響到機(jī)器人的智能。移動機(jī)器人的避障算法按照其對外部環(huán)境的感知狀態(tài)可以分為兩種,第一種是外部環(huán)境先驗的全局規(guī)劃,第二種是通過傳感器系統(tǒng)建立外部環(huán)境模型的局部規(guī)劃,也就是實時路徑規(guī)劃。
典型的避障算法包括:
2.1 人工勢場法
人工勢場法的原理是把機(jī)器人的運動看成是在虛擬力場中的運動,當(dāng)移動機(jī)器人靠近障礙物時,它們之間產(chǎn)生斥力場,且離得越遠(yuǎn)斥力越小。但是總體上移動機(jī)器人和終點產(chǎn)生的是引力場[3]。移動機(jī)器人通過斥力場躲避前方出現(xiàn)的障礙物,通過引力場朝向目標(biāo)點前進(jìn),這種勢力場是虛擬力場,但是對于機(jī)器人的自動導(dǎo)航有著良好的效果。
人工勢場法的優(yōu)點:該算法思路簡單清晰、結(jié)構(gòu)簡潔,而且便于底層的實時控制,避障程序的編寫也較為方便。
人工勢場法的缺點:容易產(chǎn)生局部最小值問題,當(dāng)移動機(jī)器人運動到墻角及狹窄地帶容易產(chǎn)生鎖死現(xiàn)象,而且當(dāng)兩個障礙物之間的距離較近的時候,該算法難以發(fā)現(xiàn)躲避路徑;另一個缺點是勢場力決策選擇時,移動機(jī)器人在障礙前容易產(chǎn)生振蕩現(xiàn)象,難以保證避障的平穩(wěn)性。
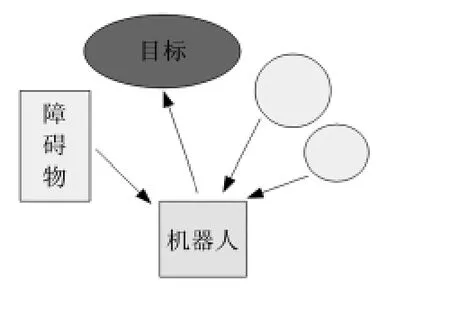
圖1 人工勢場法原理圖Fig.1 The schematic of artificial potential field method
2.2 A* 算法
A*算法是一種啟發(fā)式的避障算法,基本原理可以概括為動態(tài)最短路徑法。A*算法利用空間啟發(fā)式信息,通過對比選擇恰當(dāng)?shù)墓纼r函數(shù),然后通過動態(tài)搜索策略,求出移動機(jī)器人的最優(yōu)規(guī)劃路徑,A*算法可以分成兩類,基于C空間的A*算法和基于四叉樹的A*算法[5]。
A*算法的優(yōu)點:算法引入了啟發(fā)式函數(shù),減少了搜索的環(huán)境空間、有很高的搜索效率,將該算法應(yīng)用到移動機(jī)器人的自主避障于導(dǎo)航上有很好的實時性。
A*算法的缺點:算法搜索出的路徑比較粗糙,是一個可行性路徑,但是路徑的優(yōu)化性較差,而且對于比較復(fù)雜的未知環(huán)境,其搜索效率并不高。
2.3 RRT 算法
RRT算法是快速擴(kuò)展隨機(jī)數(shù)算法的簡稱,該算法采用了隨機(jī)查詢采樣的搜索方法,隨機(jī)采樣的意思是指不建立外部空間映射,而是經(jīng)過一個優(yōu)化策略對外部空間進(jìn)行信息采樣,然后執(zhí)行最佳路徑策略。
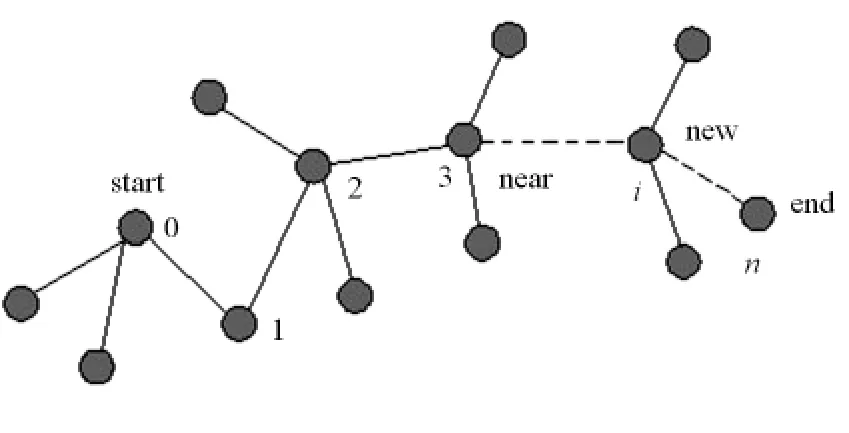
圖2 隨機(jī)樹拓展搜索Fig.2 Expand search by random tree
2.4 滾動窗口避障算法
滾動窗口避障算法是一種基于預(yù)測理論的尋優(yōu)算法,該算法的原理是移動機(jī)器人搭載了多傳感器系統(tǒng),通過該系統(tǒng)在機(jī)器人前方建立半徑為R的滾動窗口,該窗口實時探測障礙物信息并建立外部環(huán)境模型,然后通過啟發(fā)式算法生成優(yōu)化子目標(biāo),并且做出相應(yīng)的避障策略,滾動窗口不斷更新外部環(huán)境信息,產(chǎn)生多個優(yōu)化子目標(biāo),每個優(yōu)化子目標(biāo)點的疊加,使機(jī)器人到達(dá)終點[5]。
滾動窗口算法的優(yōu)點:搜索出的避障路徑較為優(yōu)化,使移動機(jī)器人能夠很好地避開障礙物,并且算法簡潔、信息存儲量小,機(jī)器人的實時性較好。
滾動窗口算法的缺點:在復(fù)雜的環(huán)境中移動機(jī)器人容易產(chǎn)生局部極小值。

圖3 滾動窗口的建立Fig.3 The establishment of a scrolling window
表1為常用的避障算法進(jìn)行綜合對比說明。
3 自主移動機(jī)器人避障算法的發(fā)展方向
以往研究的移動機(jī)器人避障算法,自身的局限性較大,而且受到傳感器技術(shù)的制約,有些算法在移動機(jī)器人的實際應(yīng)用中難以實現(xiàn)。未來在移動機(jī)器人避障算法的研究領(lǐng)域,要把算法的理論性與實際應(yīng)用性結(jié)合起來,實現(xiàn)機(jī)器人搜索路徑的高效性、實用性、優(yōu)化性,這種模式是未來機(jī)器人算法的發(fā)展趨勢。
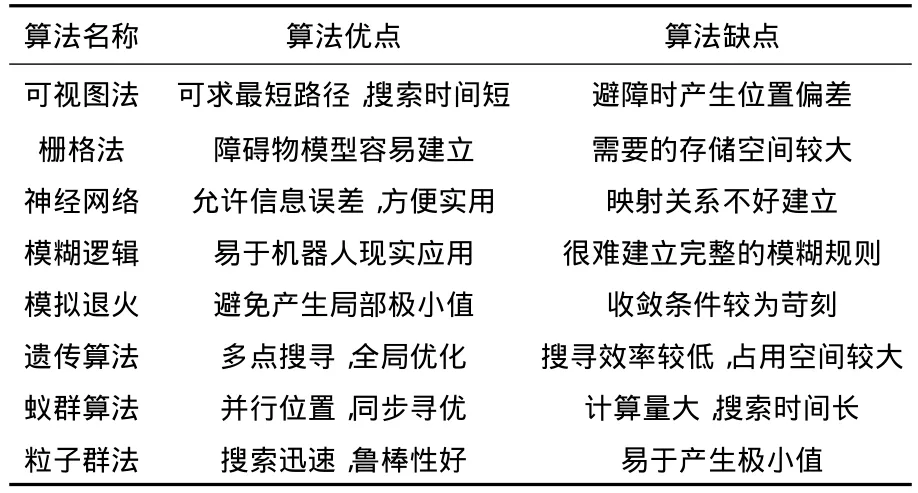
表1 移動機(jī)器人避障算法匯總Tab.1 The summary of obstacle avoidance algorithm for mobile robot
綜合考慮各種因素及以往多方面的研究,未來自主移動機(jī)器人避障算法將會朝著以下方向發(fā)展:
(1)智能算法在未來的研究中將不斷創(chuàng)新和改進(jìn)。傳統(tǒng)算法都有其自身的局限性,只適合在特定的條件下應(yīng)用,這就要求未來的研究要朝著算法融合的方向發(fā)展,把各種算法的優(yōu)良性能融合到一起。
(2)在移動機(jī)器人自主避障與導(dǎo)航領(lǐng)域,多傳感器信息融合技術(shù)將得到廣泛的應(yīng)用。傳感器系統(tǒng)為機(jī)器人提供環(huán)境信息,多傳感器信息融合技術(shù)可以使機(jī)器人建立更加準(zhǔn)確的外部環(huán)境模型,以供機(jī)器人做出導(dǎo)航策略。
(3)動態(tài)未知外部環(huán)境的研究將成為熱點。在以往避障算法的研究中,主要以靜態(tài)外部環(huán)境的研究為主,以動態(tài)外部環(huán)境的研究為輔,顯然動態(tài)外部環(huán)境更加貼近現(xiàn)實,更具有現(xiàn)實應(yīng)用意義。以往關(guān)于動態(tài)障礙物的研究,是基于動態(tài)障礙物勻速直線運動這一假設(shè)的,因此動態(tài)障礙物多種類、多數(shù)量、速度隨機(jī)、方向隨機(jī)的研究將是移動機(jī)器人自主避障研究領(lǐng)域的重點課題。
4 結(jié)論
筆者主要針對移動機(jī)器人的避障算法進(jìn)行了深入研究,通過對不同算法的優(yōu)、缺點的比較與分析,對未來自主移動機(jī)器人避障算法的研究方向進(jìn)行了探討。研究結(jié)果表明,不同算法的融合技術(shù)、多傳感器融合技術(shù)及動態(tài)未知環(huán)境下的移動機(jī)器人自主避障研究將是移動機(jī)器人避障算法研究的重點領(lǐng)域。
[1]任立敏.基于激光測距儀的移動機(jī)器人避障感知與避障策略研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2007.
[2]唐鴻儒,宋愛國.基于多傳感器信息融合的偵察機(jī)器人模糊路徑跟蹤行為研究[J].傳感技術(shù)學(xué)報,2007,20(8):1809—1814.
[3]馮建農(nóng),柳明,吳捷.自主移動機(jī)器人智能導(dǎo)航研究進(jìn)展[J].機(jī)器人學(xué)報,1997,19(6):468—473.
[4]Motamed C,Wallart O.A Temporal Fusion Strategy for Cross-Camera Data Association[J].Pattern Recognition Letters,2007,28(2):233—245.
[5]叢巖峰,基于滾動優(yōu)化原理的路徑規(guī)劃算法研究[J].長春:吉林大學(xué),2007.
[6]何偉烽,自主式移動機(jī)器人路徑規(guī)劃研究及軟件仿真實現(xiàn)[D].西安:西安電子科技大學(xué),2011.
猜你喜歡
北京航空航天大學(xué)學(xué)報(2022年6期)2022-07-02 01:59:12
體育科技文獻(xiàn)通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機(jī)設(shè)計與研究(2019年4期)2019-05-21 07:21:24
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年7期)2014-02-28 12:21:19
