仿人機器人綜述
2013-09-03 10:51:22劉振方王建丞羅志強
黑龍江科學 2013年7期
徐 莉,劉振方,王建丞,羅志強
(黑龍江工程學院,哈爾濱150050)
1 仿人機器人的概述及發展狀況
仿人機器人是一種外觀與人相似,具有移動功能、感知功能、操作功能、學習能力、自制能力、聯想記憶、情感交流的智能機器人。它具有靈活的行走功能,可以隨時走到需要的地方,包括一些對普通人來說不易到達的角落,完成人指定或預先設置的工作。仿人機器人具有人類的外觀,可以適應人類的生活和工作環境。仿人機器人集機械、材料、電子、計算機、自動化等多門學科于一體,技術含量高,研究和開發難度大。它是一個國家高技術實力和發展水平的重要標志。因此,世界各發達國家都不惜投入巨資進行研究與開發。目前,美國和日本等許多發達國家的科學家都在仿人機器人的研究與開發方面做了大量的工作,并取得了突破性的進展。仿人機器人已經對人類社會產生了巨大的影響[1]。
日本本田公司研制的仿人機器人ASIMO,是目前較先進的仿人行走機器人。ASIMO身高1.3 m,體重54 kg。它的行走速度是0~6 km/h。早期的機器人如果直線行走時突然轉向,必須先停下來,看起來比較笨拙,而ASIMO就靈活得多,它可以實時預測下一個動作并提前改變重心,因此可以行走自如,進行諸如“8”字形行走、下臺階、彎腰等各項“復雜”動作。此外,ASIMO還可以握手、揮手,甚至可以隨著音樂翩翩起舞,如圖1所示:
從誕生至今,ASIMO的進步可以用神速來形容,最新版的ASIMO,除具備了行走功能與各種人類肢體動作之外,更具備了人工智能,可以預先設定動作,還能依據人類的聲音、手勢等指令來從事相應動作,此外他還具備了基本的記憶與辨識能力[2]。
2 仿人機器人的關鍵技術
2.1 環境感知傳感器和信號處理方法
多傳感器信息融合技術的基本原理就像人腦綜合處理信息的過程一樣,它充分地利用多個傳感資源,通過對各種傳感器及其觀測信息的合理支配與使用,將各種傳感器在空間和時間上的互補與冗余信息依據某種優化準則組合起來,產生對觀測環境的一致性解釋和描述[3]。
2.2 智能控制
智能控制主要包括模糊控制、神經網絡、進化計算等,且逐漸成為成熟的控制思想[4]。模糊控制源于模糊數學,或稱弗晰數學,是研究如何表現和處理模糊性現象的一個數學分支[5~6],模糊控制是以模糊集合論、模糊語言變量及模糊邏輯推理為基礎的一種計算機數字控制。人工神經網絡控制,從生物學的觀點來看,神經網絡的功能為信息處理和推理、聯想和思維等高級的思想活動[7],而人工神經網絡控制是利用工程技術手段模擬人腦神經網絡的結構和功能的一種技術系統,它是一種大規模并行的非線性動力學系統。

圖1 ASIMO的基本動作和高級功能Fig.1 The basic action and advanced features of ASIMO
2.3 導航與定位
在服務機器人系統中,自主導航是一項核心技術,是機器人研究領域的重點和難點問題[8]。把人工神經網絡控制和多傳感器融合技術相結合用于仿人機器人的導航定位系統,如圖2所示:
3 仿人機器人的應用及發展方向
由于仿人機器人具有人類的外觀特征,更容易適應人類的生活和工作環境,代替人類完成各種作業。它不僅可以在輻射、粉塵、有毒環境中代替人類作業,而且可以在很多方面擴展人類的能力,具有廣闊的應用前景。21世紀人類將進入老齡化社會,發展仿人機器人能彌補年輕勞動力的嚴重不足,解決老齡化社會的家庭服務、醫療等社會問題。仿人機器人可以與人友好相處,能夠很好地擔任陪伴、照顧、護理老人和病人的角色,從事日常生活中的服務工作,因此家庭服務行業的仿人機器人應用必將形成新的產業和新的市場。在醫療領域,仿人機器人可以用于假肢和器官移植,用仿人機器人技術可以做成動力型假肢,協助癱瘓病人實現行走的夢想。然而,我們現在還幾乎看不到以控制論開發出的生物體與人體完美的結合,因此這方面還需要更進一步的研究和探索。仿人形機器人可以用來在展覽會上做廣告,因為它在外形上更接近人類,所以更能引起人的興趣。另外,它還可以用于家庭娛樂[9]。
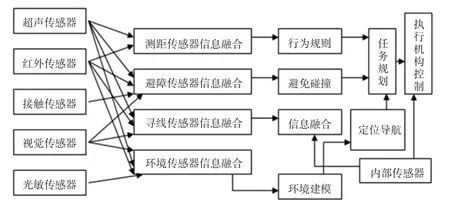
圖2 服務機器人導航定位系統Fig.2 Navigation and positioning systems for service robot
仿人機器人是許多技術的綜合與集成。但是,由于受到計算機技術、控制技術、電子技術、通信技術、傳感器技術、人工智能、數學建模、機構學、材料學、仿生學等相關學科發展的制約,仿人機器人的功能還十分有限。未來仿人機器人絕不僅僅局限于此,還會模仿人的視覺、觸覺、語言、行為、情感等功能,仿人機器人給科研工作者提供了廣闊的研究空間,提出了一個又一個新的挑戰,同時也促進了許多相關學科的發展,催生了一些新理論和新方法的出現。根據仿人機器人的發展現狀,可以對未來仿人機器人的研究方向和發展趨勢做以下預測。
3.1 本體機構的改進
仿人機器人是一個多關節和具有冗余自由度的復雜系統。如何實現預期功能而且又使結構最優化是一個很值得研究的問題。一個功能齊全的仿人機器人必須要有一個結構緊湊、配置合理的機械本體。在研制過程中,應該考慮采用更先進的材料,提高零件的制造精度和裝配精度。也有一些研究者在研制人造肌肉,通過空氣氣囊的充氣和排氣帶動關節動作。
3.2 運動學和動力學求解理論和方法的發展
一個理想的步態規劃對于仿人機器人行走的穩定性是非常有益的。由于仿人機器人的高階、強耦合和非線性,使得仿人機器人運動學和動力學的精確求解非常困難,而且也沒有十分理想的理論或方法來求解逆運動學的解析解,只有外加一些限制條件,如能量消耗最小、峰值力矩最小等來求出運動學和動力學的近似解。這樣往往導致仿人機器人的規劃運動與實際運動有較大的出入。所以要想得到理想的運動規劃,必須在運動學和動力學的求解方法上有重大的突破。
3.3 驅動電源的改進
理想的能源應該具有高能源密度、耐高溫、耐腐蝕、可再生、低成本等優勢。但是,現在自帶能源容量有限,而且仿人機器人的關節眾多,所以如何改進驅動源,使其體積小、重量輕而且容量大,也是在仿人機器人的研制過程中必須解決的問題。
3.4 傳感器技術的發展
仿人機器人安裝了大量的傳感器,在仿人機器人的自主辨識中,就是靠這些傳感器收集機器人本身及外部的信息并加以處理,然后反饋給計算機進行計算、分析、比較并得出結果,從而控制機器人的動作。因此在未來如何研制出高精度且價格低廉的傳感器將對仿人機器人的發展有重大的影響。
3.5 控制技術和集成技術的發展
仿人機器人的關節眾多,控制電路復雜,要真正地實現仿人,并且擁有人類并不擁有的其他功能,其控制電路將愈加復雜。如何尋找更加優化的控制方案和控制機構,受到越來越多學者的重視。
3.6 智能技術和軟件技術的發展
目前機器人的智能程度還遠遠沒有達到人類的要求,如何將人類的智能復制到仿人機器人上,將是未來仿人機器人研究的重點。
3.7 網絡機器人技術和虛擬機技術
通過通信網絡將許多個仿人機器人連接到計算機網絡上,并且通過網絡對仿人機器人進行有效的控制,這種技術包括網絡遙控操作控制技術、信息組壓縮和擴展技術以及傳輸技術等。在將遙控作為一種主要手段控制仿人機器人的同時,基于多傳感器、多媒體和虛擬現實、增強的虛擬遙控操作和人機交互技術,也是需要大力發展的技術[10]。
[1]蔡自興.機器人學基礎[M].北京:機械工業出版社,2009.
[2]度齡.機器人明星-Asimo[J].中國青年科技,2003,(11).
[3]趙蕊,賀建軍.多傳感器信息融合技術[J].計算機測量與控制,2007,15(9):100—112.
[4]張毅,羅元,鄭太雄,等.移動機器人技術及其應用[M].北京:電子工業出版社,2007:34—52.
[5]Li R,Wallance A,Spef R,et al.Two-axis model development of cage-rotor brushless doubly-fed machines[J].IEEE Trans on Energy Conversion,1991,6(3):453—460.
[6]Hu H,Brady M.A Bayesian approach to real-time obstacle avoidance for an intelligent mobile robot[J].International Journal of Autonomous Robots,1994,1(1):64—102.
[7]王灝,毛宗源.機器人的智能控制方法[M].北京:國防工業出版社,2002:21—32.
[8]孟慶春,齊勇,張淑軍,等.智能機器人及其發展[J].中國海洋大學學報,2004,34(5):831—838.
[9]李云江.機器人概論[M].北京:機械工業出版社,2011:37—61.
[10]管貽生.仿人機器人[M]北京:清華大學出版社,2007:64—102.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
哈哈畫報(2022年4期)2022-04-19 11:11:50
大科技·百科新說(2021年6期)2021-09-12 02:37:27
英語文摘(2021年2期)2021-07-22 07:56:54
好孩子畫報(2020年5期)2020-06-27 14:08:05
意林·全彩Color(2019年6期)2019-07-24 08:13:50
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
奧秘(2015年2期)2015-09-10 07:22:44
