基于C語言的測量數據修正技術
2013-08-30 06:26:18趙軍
計算機與網絡 2013年15期
趙軍
(中國電子科技集團公司第五十四研究所河北石家莊050081)
1 引言
基于C語言的數據處理軟件在測控系統中應用廣泛[1],它提供了良好的人機交互平臺,它的使命是監視測控目標的工作狀態,信息采集和處理,完成對目標的故障報警、鏈路和設備控制。測量數據作為其中的關鍵數據,是數據處理軟件的核心處理部分,同時起著至關重要的作用。
針對鏈路中測量數據所產生的跳值和斷點等問題,軟件采用了數據緩存技術,采集來自鏈路的測量數據進行處理,通過緩沖區保存的有效數據量對后續數據進行合理性判斷和預測,也就是準則和卡爾曼濾波相結合的數據處理技術,保證了數據的有效性,提高了數據連續性和平滑性[2]。在研制過程中,通過實驗,保證了它的可靠性。
2 功能概述
在測控系統中,地面站定向天線對飛行目標實現實時準確的跟蹤是保證測控鏈路穩定可靠的關鍵,其中測量數據方位角是重要的跟蹤數據。利用方位角實現天線對飛行目標的跟蹤和引導[3]。
假設觀測站位置在P1點,目標點在P2點,測出觀測站到目標的真北夾角A,測量方位角(真北)示意圖如圖1所示[4]。但由于任務過程中,無線電鏈路特性和干擾等因素的影響,測量數據會出現跳值及斷點數據,對天線跟蹤飛行目標產生了很大的影響。必須要進行修正,要保證送給用戶的數據是連續、有效和可靠的。基于此,提出了采用準則和卡爾曼濾波相結合的數據修正技術來提高測量數據的平滑連續及有效性。
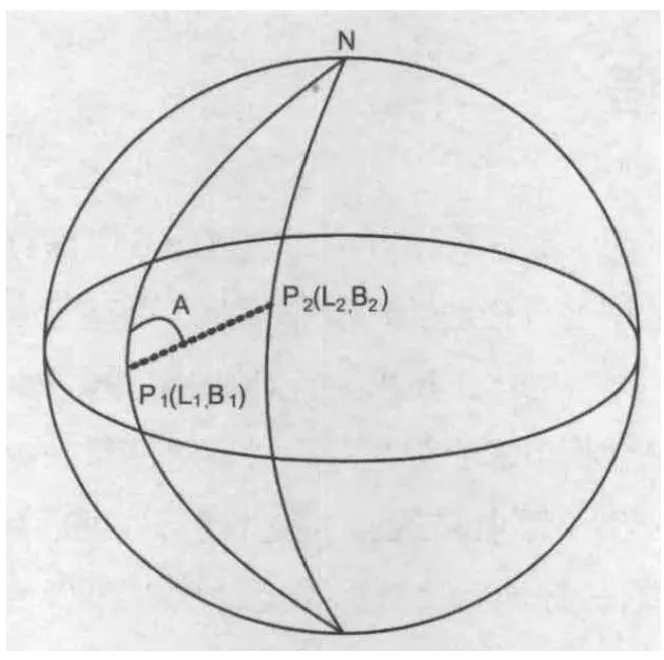
圖1 測量方位角(真北)示意圖
3 數據的修正
3.1 3б剔除野值
通過以上步驟,進行循環處理,數據緩沖區的內容是一直更新的,更新數據為當前鏈路接收到的有效數據,遵循先進先出的堆棧原則,通過以上方法,可以有效的去除鏈路誤差帶來的數據跳值,并對跳值進行更正.同時根據當前有效數據進一步修正,也就是下面的卡爾曼濾波修正。
3.2 卡爾曼濾波平滑算法
卡爾曼濾波采用狀態空間的概念,把數據處理過程視為線性輸出,輸入輸出關系用狀態方程描述;借助測量數據過程的狀態轉移方程,根據前一時刻的估計輸出量,得出當前時刻的預測估計量,并通過與當前輸入量的誤差,濾波修正預測估計,輸出當前時刻的估計輸出量;以這種不斷預測-修正的線性遞推方式獲得逐點濾波結果。卡爾曼濾波的線性遞推數學模型及推導。
利用卡爾曼濾波進行狀態估計可以分為3個步驟:初始化、預測和更新。狀態方程:

觀測方程:

一步狀態預測方程

一步狀態預測誤差協方差矩陣

狀態濾波方程

增益矩陣

狀態濾波誤差協方差矩陣

由此得到濾波器的新息方程和新息方差為


在利用卡爾曼濾波修正算法對動態測量數據濾波處理中,根據新的樣品值,實時檢測濾波器的新息值和新息方差,實現對測量數據的平滑和重構。卡爾曼濾波處理過程如下:
①利用估計的真值初始化卡爾曼濾波器。初始條件為:



新測量的數據進行最優估計。?準則和卡爾曼濾波處理算法通過對輸入數據進行處理,實時得到當前位置參數的估計值,并預測下一個位置的估值,當數據正常時,則發送給用戶;當數據出現斷點、跳點或者數據暫時丟失時,利用算法的記憶功能,也就是緩存區內的最終數據,以數據丟失瞬間時的狀態參量對輸出數據進行估計,并將結果送給用戶。
4 數據處理分析
為了驗證上述方法的可行性和修正效果,首先進行了仿真,數據源采用實際聯調的測量方位角。數據修正前后對比如圖2所示。
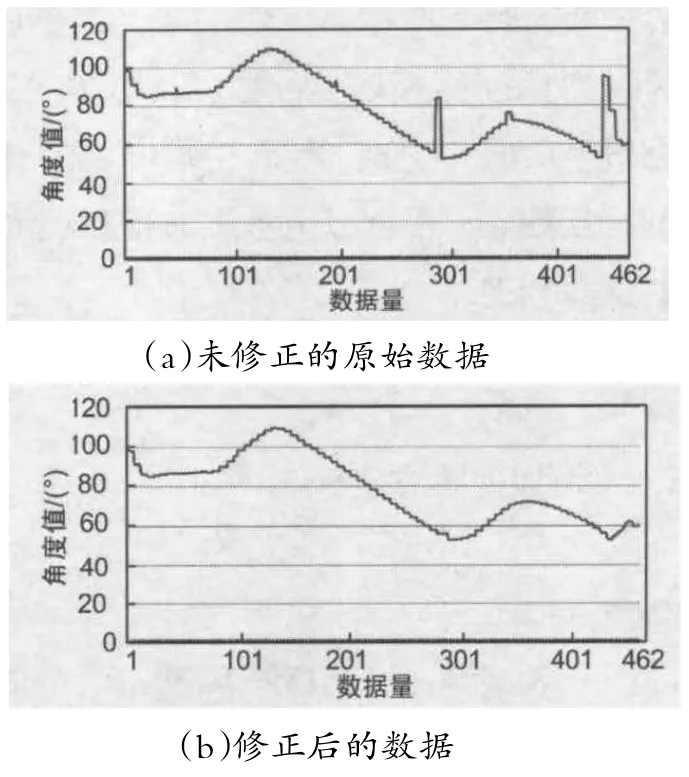
圖2 數據處理分析圖
由上圖可以可見:①采用準則和卡爾曼濾波處理方法后,有效剔除了跳值,并重構了剔除跳值后測量數據的連續性和有效性;②對測量數據中出現的毛刺,采用準則和卡爾曼濾波處理算法后,誤差明顯下降,保證了測量數據的平滑性;③當出現較多跳值時,濾波器一直是收斂的,并對部分跳值進行了有效剔除和預測。
5 結束語
軟件采用了數據緩存方法,通過緩沖區保存的有效數據量對后續數據進行合理性判斷和預測,并基于3б準則和卡爾曼濾波相結合的修正技術,可以剔除測量數據中的跳點,還可以對測量數據中的毛刺進行平滑,對測量數據中的斷點進行重構,有效性,實時性較強。經過試驗,處理后數據達到了技術指標要求,較好地反映目標的運動狀態,及時、準確地對目標進行鑒定。
[1]KRUGLINSKID J.Visual C++技術內幕[M].北京:清華大學出版社,1997.
[2]劉蘊才,房鴻瑞,等.遙測遙控系統[M].北京:國防工業出版,2000
[3]LAJOIEJ.C++Primer(中文版)[M].北京:中國電力出版社,2001.
[4]武漢大學測繪學院大地測量教研室.大地測量學基礎編[M].湖北:武漢大學出版社,2005.
[5]祝轉民,楊宜康等.Kalman濾波工程應用問題分析及改進方法研究[J].宇航學報,2002,23(3):65-69.
[6]武漢大學測繪學院測量平差教研室.測量平差基礎[M].北京:測繪出版社,2000.
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
電源技術(2015年1期)2015-08-22 11:16:28
