船用新型電動舵機可行性研究
2013-08-26 02:46:44謝俊超
艦船科學技術 2013年10期
謝俊超,肖 清,花 靖
(中國艦船研究設計中心,湖北 武漢 430064)
0 引言
舵機作為保證船舶安全航行的重要設備,可靠性要求較高。液壓舵機因其大功率和高可靠性,能夠較好地滿足相關動力和空間布置的要求,常用作船舶操舵系統的主舵機。然而液壓舵機需要布置大量的液壓管路和閥件,在效率、維護性、可控性和集成性等方面存在許多缺陷,影響其功能更好的發揮。
為了克服采用液壓舵機帶來的上述缺點,電動舵機重新引起了研究人員的重視。隨著新型稀土永磁材料的出現,以及電機技術、控制技術和精密制造等技術的發展,電動舵機技術獲得突破,并在航空航天領域得到廣泛應用[1]。
船舶方面,國外海軍對此技術高度重視,英國海軍研制了用于水面艦船及潛艇舵面控制的電動舵機。該電動舵機采用折返式連接結構,體積小,布置方便。通過在23型護衛艦上進行試驗和測試,證明其具有噪聲低、可靠性高、維護簡單、耗能少等優點。
基于電動舵機的上述優點以及電動傳動技術的不斷發展,未來艦船將有可能完全取消液壓舵機,而采用新型電動舵機 (electro-mechanical actuator,EMA)作為舵面執行機構。
本文提出一種船用新型舵機方案,與傳統液壓舵機相比,能較好地滿足提高能量利用率、降低操舵噪聲、實現集成控制和降低維護費用等方面的需求。
1 新型電動舵機方案
電動舵機需要將電動機的旋轉運動變為推桿的直線運動,達到和液壓舵機相似的驅動效果。由于舵的轉動速度較低,所需推力較大,采用不同形式的直線傳動機構對整個電動舵機的工作可靠性有較大的影響。
早期的直線傳動機構包括蝸輪蝸桿式、齒輪齒條式和螺母絲桿等,這些傳動機構有一個共同的缺點,即無法長時間重載工作,此外還會附帶產生振動噪聲和溫升等問題,嚴重制約了機電傳動裝置的發展。近年來,雖然出現了新型的直線電機,但因其推力較小,無法適用于重載的場合。行星滾柱絲杠作為一種新型的直線傳動單元,有效地解決了目前機電傳動技術發展的瓶頸,特別是其能夠在高精度、重載工況下長時間連續工作,使得行星滾柱絲杠成為船舶舵機傳動機構的理想選擇。
考慮到船舶舵機的運行工況復雜,對工作可靠性要求較高,并且布置位置極其有限,根據舵機的選型設計要求,對電氣和機械部分進行優化設計,并結合國內外機電傳動先進技術,提出如圖1所示采用力矩電機和行星滾柱絲杠結合的新型電動舵機方案。
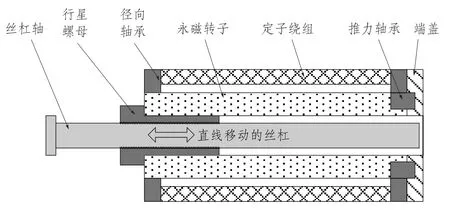
圖1 新型一體化電動舵機的典型部件Fig.1 The typical components of the new integrated marine electro-mechanical actuator
該新型一體化電動舵機將力矩電機和行星滾柱絲杠集成在一起,將轉子設計成中空結構,轉子由2個徑向軸承和1個軸向軸承支撐,把行星滾柱安裝在轉子上,最終將電機的轉動轉化為絲杠的直線運動。這種結構能夠大大減少舵機的體積和重量,容易實現高精度伺服控制,相對于現有的液壓舵機具有以下優勢:
1)結構更加緊湊,可靠性高,能耗低,維護性能好;
2)便于實現集成化,可與標準伺服控制兼容,實現高精度自動化控制;
3)具有良好的動態性能,輸出波動小,靜音效果好;
4)應用潛力大,無液壓驅動,設備更環保,生存性更強。
根據船舶的使用工況,對圖1所示方案所涉及的關鍵器件及技術進行可行性研究,主要包括如何實現關于電磁兼容、集成性、高效率、動態性能、免維護性和過載性能等方面的需求等。
2 關鍵技術可行性分析
2.1 行星滾柱絲杠技術可行性分析
行星滾柱絲杠作為一種新型的直線傳動單元,其主要由行星滾柱、絲杠、螺母組成。在主螺紋絲杠周圍,按行星方式布置安裝了6~8個螺紋滾柱,通過行星滾柱將電機的旋轉運動轉換為絲杠或螺母的直線運動,如圖2所示。

圖2 行星滾柱絲杠結構示意圖Fig.2 The Schematic diagram of planetary roller screw
行星滾珠絲杠與其他線性運動機構對比如表1所示。通過比較可知,由于其獨特的結構,行星滾柱絲杠具有更大的承載能力、更高的剛度和更長的使用壽命,并且在振動噪聲、可維護性和效率等方面明顯優于其他線性運動機構。
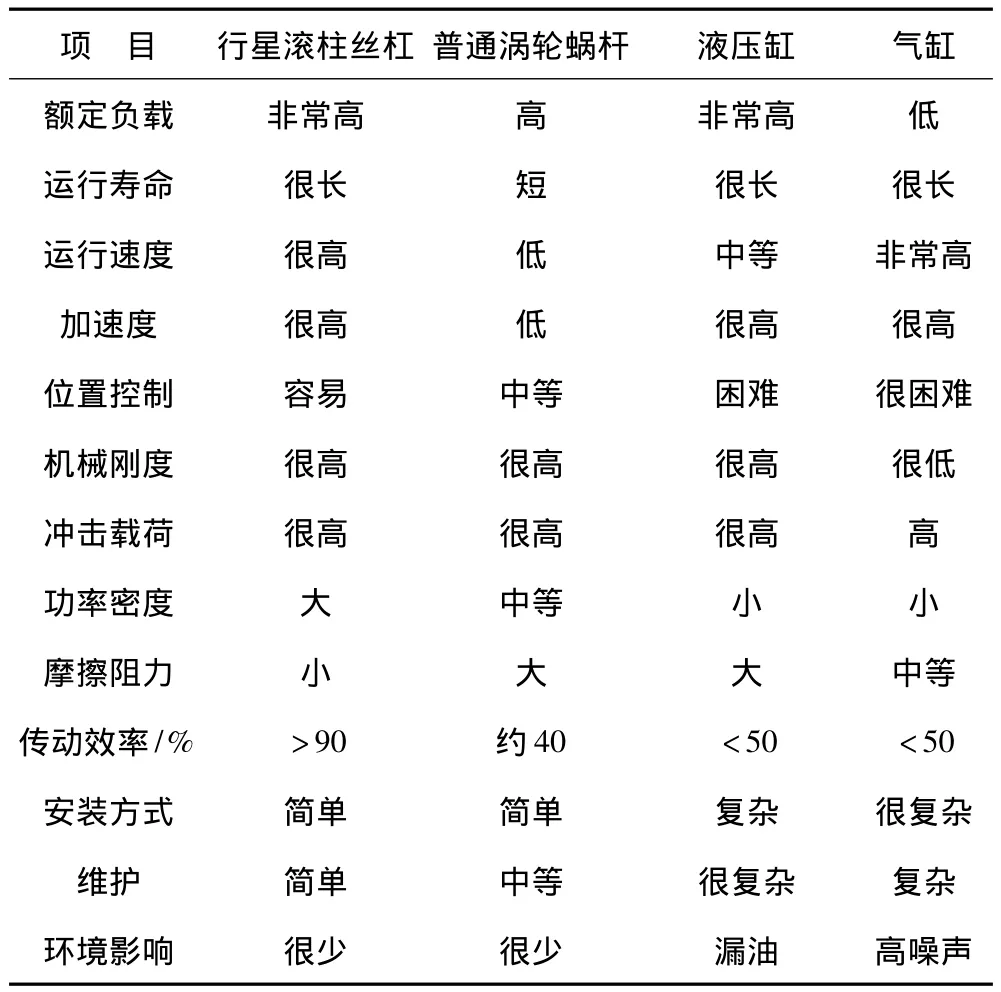
表1 行星滾柱絲杠與其他線性運動技術對比Tab.1 The technical comparison from the planetary roller screw and other linear motion
行星滾珠絲杠作為新型的直線運動單元,能夠很好地滿足船舶舵機的應用要求。目前,國外有很多廠家可制造大推力的行星滾柱絲杠,國內也能夠研制和生產小推力的行星滾柱絲杠。隨著國內精加工技術的提高,大推力行星滾柱絲杠研制技術應可突破。
2.2 電機及控制技術可行性分析
20世紀80年代以來,隨著電力電子技術的發展,永磁交流伺服電動機技術有了迅猛發展,國內外著名電氣廠商相繼推出永磁交流伺服電動機及驅動器,使其成為當代高性能伺服系統的主要發展方向。
根據電動舵機的工作特性,初步選用永磁交流伺服力矩電機,由于其低速大扭矩的特性,可以直接帶動低速負載,與傳統的電機和齒輪減速組合成的間接驅動相比,采用永磁交流伺服電機直接驅動的控制系統具有以下優點:
1)電機工作的線性度好 (見圖3)。由于在其轉速范圍內,轉矩幾乎恒定,可以獲得較好的控制效果,避免了傳動的波動性。

圖3 交流伺服電動機的特性曲線Fig.3 The characteristic curve of the AC servo motor
2)由于省掉了中間傳動機構,能夠有效降低系統的振動噪聲,提高整體可靠性。此外,通過采用水冷技術、新永磁材料和集成化技術,能夠有效解決電機發熱問題,使其結構緊湊,維護方便,提高其過載能力。
3)速度和位置的精度高。由于消除了齒輪間隙和彈性變形引起的誤差,而且可以與標準伺服系統兼容,通過各種不同的閉環控制模式,能夠實現對電動舵機的全面控制 (見圖4)。

圖4 伺服控制器原理圖Fig.4 The schematic diagram of the servo controller
目前,永磁交流伺服電機技術和伺服控制技術已經較為成熟,可以實現新型電動舵機的基本功能需求。
2.3 余度技術可行性分析
由于舵機對船舶安全航行的重要性,因此在新型電動舵機的設計中采用余度技術對于提高系統可靠性具有重要意義。
在電動舵機傳動系統中,電機和控制部分是整個傳動系統可靠性相對較為薄弱的環節。因此,在電機和控制電路中引入余度設計,可有效提高整個舵機系統的可靠性。由于控制部分采用多通道,其余度技術較為成熟,在此主要對電機余度技術進行探討。
電機的余度技術主要是在繞組上進行考慮。在雙余度機電驅動系統中,電機繞組的結構主要有串聯式結構和并聯式結構2種形式。由于繞組串聯結構既造成了電機體積增大,又會導致1個繞組故障時,產生相反的感應電勢,使得電機的動態性能降低,因此一般采用并聯繞組的結構。
并聯式雙余度電機只有1套定轉子,電機的2套定子槽內設置2套繞組,互為備份。定子的繞組上有2套星型連接的集中式三相繞組,2套繞組相差30°電角度,2套定子繞組分別由2套逆變電路供電,若電機2套繞組的電流完全相同,則電動機的輸出轉矩為每套產生轉矩的2倍。這2套逆變器的電源及控制電路相互獨立,可以實現完全的雙余度控制。
此外,由于電機繞組的備份可以認為是采用了相似的余度技術,在一次故障發生時,類似條件下可能導致剩余余度也發生故障,因此,在高要求的系統中還可以在此基礎上考慮機械余度,以確保其高可靠性。
3 技術難點及研究方向
綜合考慮現有的技術條件,對于電動舵機下一步的發展還需要進行以下幾個方面的研究:
1)電動舵機的集成技術研究。通過研究力矩電機和行星滾柱絲杠的配合集成技術、電機水冷技術和免維護技術等,并充分考慮電磁兼容、振動沖擊等要求,進一步降低電動舵機的運行噪聲,提高其運行效率,減少布置空間需求。
2)電動舵機可靠性及故障診斷技術研究。通過對電動舵機運行的故障診斷技術進行研究,實現對電動舵機主要部件的故障進行預報,研究對各個關鍵設備進行維護的方法,進一步提高電動舵機的可靠性。
3)電動舵機控制技術研究。主要對電動舵機的速度、響應性能以及操控性能進行研究。由于舵裝置在實際運行中的載荷無規律連續變動,使得電動舵機的負載變化較大,需要集成多種不同的閉環控制模塊,對伺服電動舵機進行全面控制。
4 結語
雖然電動舵機技術在航空航天領域已經得到了較充分的應用,但由于應用場合不同,電動舵機在船舶上的應用還存在較多的技術難點,目前還處于起步階段,需要進一步開展此方面的研究。本文充分考慮了當前的技術水平,提出的新型電動舵機方案能較好地滿足當前艦船上舵機的要求,并指明了需要進一步研究的重點和方向,為類似的傳動需求提供了新的機電解決方案,對加速提升機電傳動技術,促進機電傳動裝置在艦船上的發展應用具有重要作用。
[1]沙南生,李軍.功率電傳機載一體化作動系統的研究[J].北京航空航天大學學報,2004,30(9):909 -912.
[2]陸軍,張元國,王長路.電動舵機余度技術概述[J].機械傳動,2010,34(3):92 -95.
[3]KNOP C,BLESS H.Electro-mechanical actuators in the superstructure of submarine[R].UDT Europe,2009.
[4]韋振興.行星滾柱絲杠副剛度及效率的分析與研究[D],武漢:華中科技大學,2011.