磁強計式數控消磁系統電流控制技術
2013-08-26 02:46:46張朝陽
艦船科學技術 2013年10期
衣 軍,張朝陽
(中國人民解放軍91872部隊,上海 200083)
0 引言
在艦船磁性防護中,艦船磁性一般分為固定磁性和感應磁性[1],固定磁性一般變化較小且不隨艦船姿態變化,可以在消磁場站進行磁性處理[2],而感應磁性則隨艦船航向和姿態變化,必須利用安裝在艦船上的消磁系統[3]進行補償。消磁電流控制儀是艦船消磁系統的重要組成部分,它根據作用在艦船上的地球磁場,實時地向消磁電源提供消磁電流控制信號、顯示消磁繞組中的電流和消磁系統工作狀態,并進行不同的工況轉換。消磁電流控制儀一般可分為羅經式消磁電流控制儀、磁強計式消磁電流控制儀和地磁解算式消磁電流控制儀。羅經式消磁電流控制儀無法根據艦船姿態變化對消磁電流進行調整,目前應用較少;地磁解算式消磁電流控制儀比較先進[4],但不能對變化的地磁場和局部異常地磁場作出反應;目前應用最多的是磁強計式消磁電流控制儀。
對于磁強計式消磁電流控制儀 (如XC-4D型、XC-4(89)型等),由于磁探頭安裝位置的限制,使得磁探測器在接收地球磁場的同時,還將接收包括船體磁場、繞組磁場等干擾量,直接影響了消磁系統的電流控制精度,因此需要對此類儀器進行抗干擾調整[5]。由于需要專用設備和專業技術人員,并且過程復雜,抗干擾調整工作實施難度較大,為此相關部門對此類儀器的控制和調整技術進行了改進[6],研制了4DJ型消磁電流控制儀,即所謂“磁強計式數控消磁系統”,實現了由普通技術人員對儀器進行快速測量操作、儀器自動進行地磁分量解算和電流控制參數調整,在艦船平穩航行在同一緯度區的情況下,較好地改善了艦船的消磁質量。但是,艦船在實際航行過程中,要求其一直處于平穩航行狀態是很困難的,并且經常要跨緯度區航行,因此必須對磁強計式消磁系統的電流控制技術進行改進,使之能實現對艦船在任意地區、任意狀態下磁探測器所接收的干擾磁場進行測量和分離,改善消磁電流的控制精度,切實提高艦船的磁性防護能力。
1 磁強計式數控消磁系統控制模型
磁強計式數控消磁系統的原理框圖如圖1所示。對比傳統的三分量磁強計式消磁電流控制儀原理框圖 (如XC-4D),可以發現該系統在硬件設計上作了一些重要改進,例如:增加了測量磁場的顯示功能,去掉了磁探測器處的主反饋,去掉了交叉反饋和固定補償等。
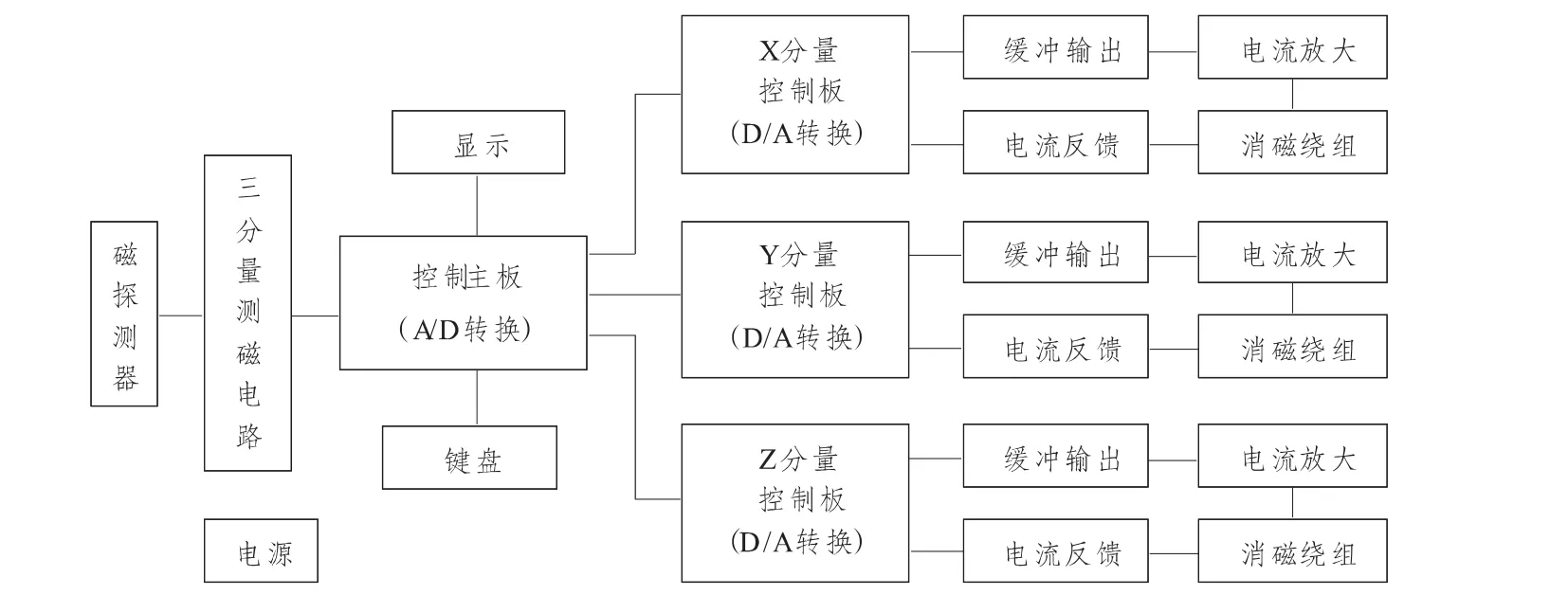
圖1 磁強計式數控消磁系統原理框圖Fig.1 The principle diagram of the magnetometer numerical control degaussing system
在任意地區、任意狀態下,地磁場在艦船坐標系下的三分量HX,HY,HZ為:

式中:φ,θ,φ分別為艦船的縱傾、橫搖和航向角;HD和ZD分別為地磁水平與垂向分量。
如將艦船坐標系與地理坐標系的轉換矩陣記為A,則有:
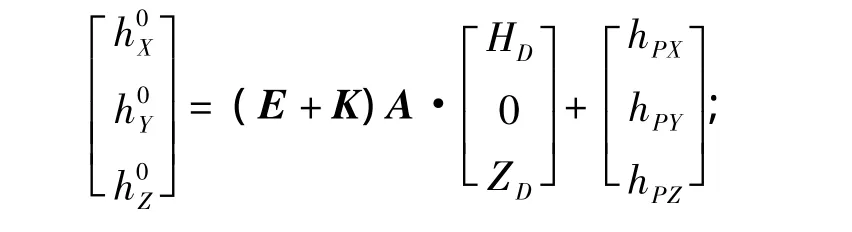
根據圖1所示,對于磁強計式數控消磁系統,在任意狀態下,安裝在艦船桅桿上的磁探頭所接收到的磁場為[7]:

式中:E為單位矩陣;K為感應磁化系數矩陣;η為消磁繞組反饋矩陣;IX,IY,IZ為消磁電流;hPX,hPY,hPZ為固定干擾量。
作為特例,在所有消磁繞組開路的情況下,式(2)可寫成:

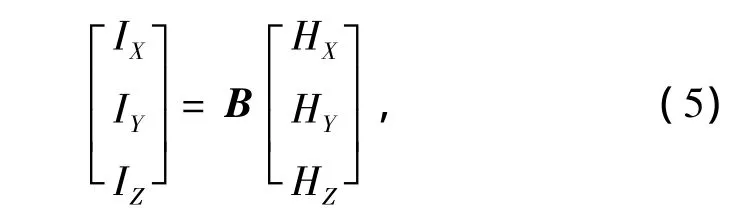
在沒有干擾量的情況下,消磁電流(IX,IY,IZ)與地磁分量(HX,HY,HZ)的關系函數為
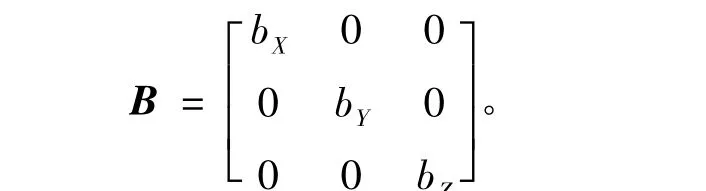
式中B為系統設計常數:
代入式(3),整理后得到:

式(7)即為磁強計式數控消磁系統電流控制模型。η,K及(hPX,hPY,hPZ)為常數矩陣,可在系統校準期間測量獲得。
2 干擾量 (常數矩陣)的測量計算
2.1 矩陣K與固定干擾量hPX,hPY,hPZ的測量與計算
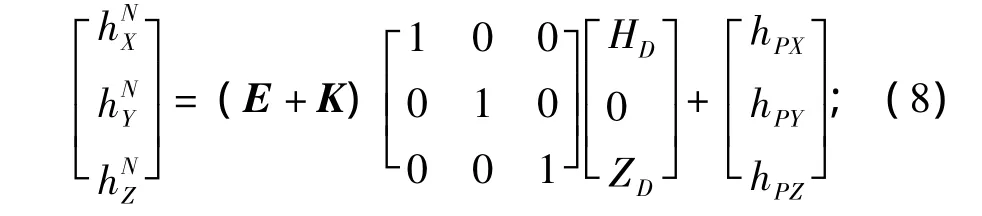
在艦船沒有縱傾和橫搖運動(φ=0°,θ=0°)、消磁繞組斷開情況下,在4個主航向進行磁場測量[8],并依據式(4),可得到式(8)~式(11)。
北航向(φ =0°,θ=0°,φ =0°)時,磁場分量(hX,hY,hZ)的測量值為
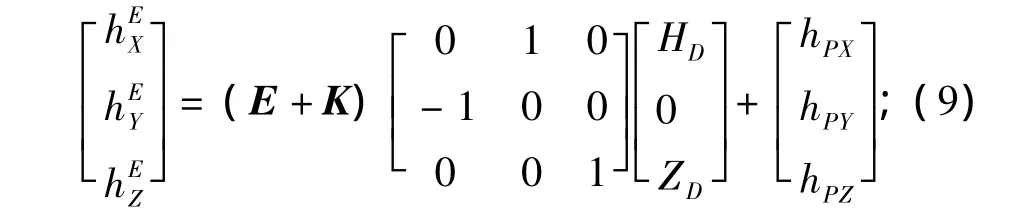
東航向(φ =0°,θ=0°,φ =90°)時,磁場分量(hX,hY,hZ)的測量值為
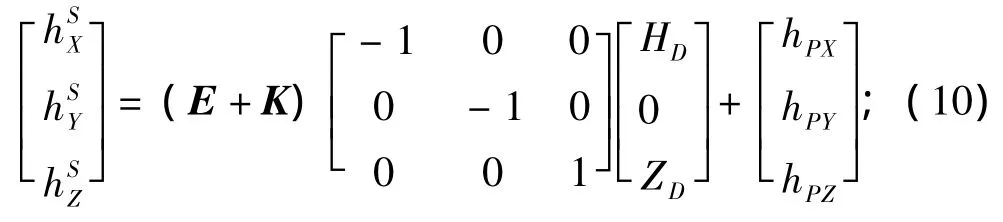
南航向(φ =0°,θ=0°,φ =180°)時,磁場分量(hX,hY,hZ)的測量值為
西航向(φ =0°,θ=0°,φ =270°)時,磁場分量(hX,hY,hZ)的測量值為

在東航向上,對艦船進行角度為+θ1,-θ1橫搖運動 (無縱傾,消磁繞組斷開),測量艦船磁場,可以得到式(12)和式(13)。
搖擺角為+θ1時,磁場分量(hX,hY,hZ)測量值為
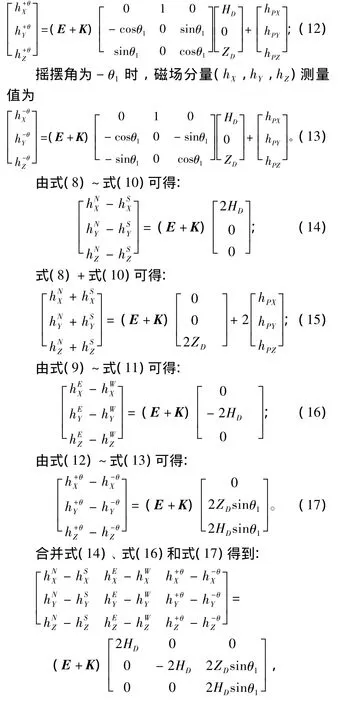
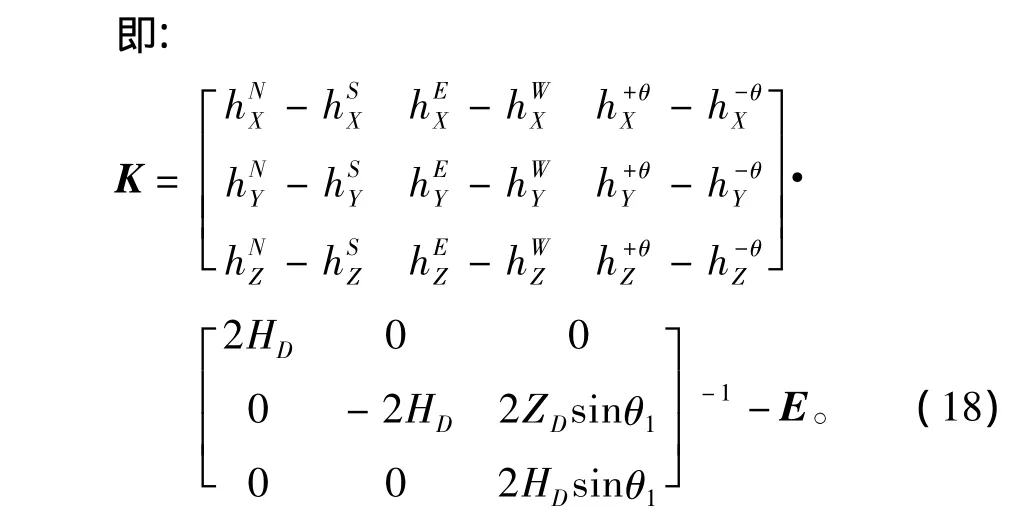
求出矩陣K之后,由式(15)可得到固定干擾量計算公式:

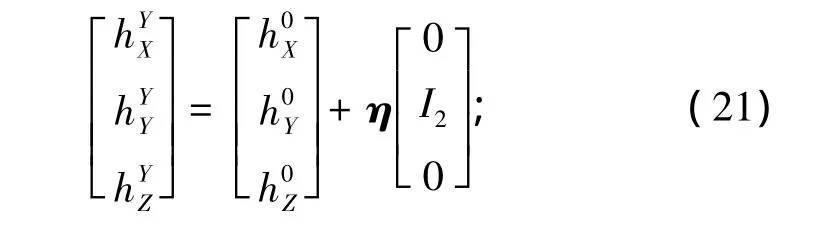
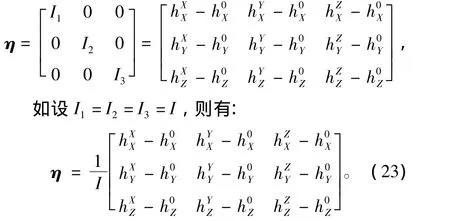
2.2 矩陣η的測量與計算
保持艦船處于無搖擺運動狀態,在一固定航向上,通過對不同繞組進行通斷電,測量其相應狀態下的磁場值,可計算得到η,具體步驟如下:
首先,斷開3個消磁繞組,測量艦船初始磁場值,并由式(3)可得
其次,將X分量繞組通以電流I1;Y和Z分量繞組保持斷開狀態,測量艦船磁場值,得到:

然后,將Y分量繞組通以電流I2;X和Z分量為斷開狀態,測量艦船磁場值,得到:
最后,對Z分量繞組通以電流I3;X和Y分量為斷開狀態,測量艦船磁場值,得到:
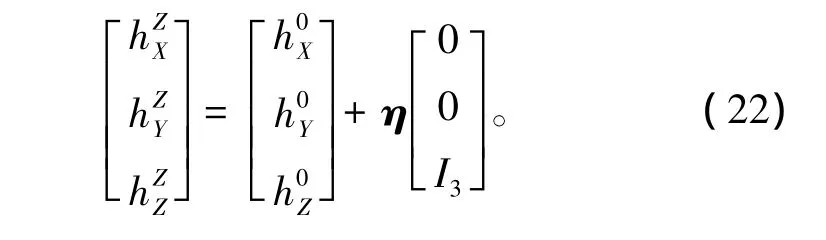
合并式(20)、式(21)和式(22),整理后得到:
3 結語
在測量、計算得到了艦船的感應磁化系數矩陣K、消磁繞組反饋矩陣η和固定干擾量,并已知測量地的地磁分量HD,ZD和系統設計常數矩陣B的情況下,利用本文所提出的消磁電流控制模型可以實現對艦船在任何地理位置、任意狀態下消磁電流的精確控制,克服了4DJ型儀器對艦船航行姿態及艦船航行到新的緯度區需要對儀器進行校準的限制,降低了艦載消磁設備的維護、使用技術要求,對切實提高艦船的磁性防護能力具有重要的意義。
[1]HOLMES J J.Reduction of a ship's magnetic field signatures[M].Maryland:Morgan & Claypool Publishers,2008.
[2]張連魁.艦船磁場分析、臨時線圈消磁[M].武漢:海軍工程大學,1991.
[3]張國友.艦船消磁系統[M].武漢:海軍工程大學,1994.
[4]劉大明,何明,劉勝道.基于地磁模式組的艦船消磁電流調整器[J].海軍工程大學學報,2001,13(4):18 -21.
[5]肖昌漢.艦船磁性防護系統及其抗干擾調整方法[D].武漢:華中理工大學,1998.
[6]吳烏明.磁強計型消磁電流調整器改進研究[J].水中兵器,2004(1):37-41.
[7]肖昌漢,盧慶芳,王智勇.艦船任意姿態下消磁系統電流變化關系[J].海軍工程大學學報,2002,14(1):14-18.
[8]閆輝,肖昌漢.一種海洋環境地磁場三分量測量方法[J].海軍工程大學學報,2005,17(6):80 -83.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21