基于灰關聯分析和證據理論的多傳感器目標識別方法
2013-08-22 08:02:34潘智宗
科技視界 2013年7期
潘智宗
(中國人民武裝警察部隊工程大學 信息工程系,陜西 西安 710086)
0 引言
在振動傳感器對橋梁、倉庫等進行監視和戰場探測等應用中,目標識別是重要的環節之一。由于信號到達傳感器陣列的時間和幅值不同,即使是同一種目標運動引起的振動信號在同樣的檢測范圍內得到的信號都會有較大的差別。因此,各傳感器提供的信息往往包含著大量的不確定性,給快速識別目標類型帶來了很大困難。信息融合技術可以綜合多個傳感器的數據來確定目標的特征參數,但單一的數據融合方法具有局限性,不能很好地解決干擾存在下的目標分類識別問題。為了提高目標識別的正確率,本文提出了一種基于改進的灰關聯分析和證據理論的振動目標識別方法。先由改進后的灰色聯分析法得出各傳感器的基本概率賦值,再利用基于基本概率賦值的決策準則來識別振動源的類型。
1 改進的灰關聯算法
灰關聯分析是按發展趨勢進行分析,對樣本量大小沒有太高的要求,分析時也不需要典型的分布規律,且分析結果一般與定性分析相吻合。因而采用灰關聯分析方法對現有少量偵查數據進行綜合分析,可為實時、準確地進行輻射源識別提供理論基礎和數學依據。
但傳統的灰色關聯算法也有其自身的局限性。例如,特征指標權重的選取是人為給定的,主觀因素較大,過于經驗化和絕對化;灰關聯分析是針對數據精確數的情形,不能體現出傳感器獲得的信息是模糊、不確定的特點。為此,本文以區間數來表征目標類型的特征指標值和傳感器測量值,利用區間灰關聯度和熵權提出了一種不確定融合算法。
1.1 區間灰關聯
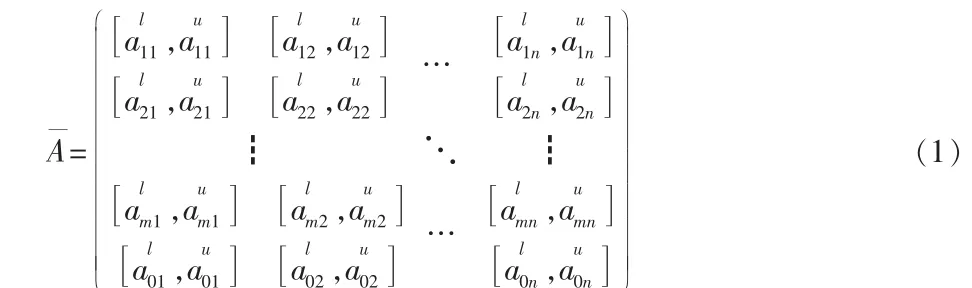
針對傳感器目標識別問題,設其目標類型集為:s={s1,s2,……,sm},每個目標類型包含的特征指標集為:p={p1,p2,……,pm}。針對目標類型 si按屬性 pj進行測量,得到 si關于 pj的屬性值為區間數從而構成特征指標矩陣:

由此可得識別目標類型與待識別目標距離矩陣為D=(dij)m×n,其中

則根據灰色關聯理論,區間灰關聯系數可定義為:

由(4)式可得,各目標類型與未知目標X的區間灰關聯系數矩陣為 ξ=(ξij)m×n
若特征屬性權重向量 W={w1,w2,…,wn}已知,則目標類型 si與 X的區間灰關聯度為:

γi反映了X與si的相似程度,γi越大,表明X與si越相似,即未知目標X屬于目標類型si的可能性越大。本文中權重的確定采取文獻[4]的熵權法獲取。
2 證據理論的基本知識
2.1 證據組合規則
假設輻射源識別框架為 U={R1,R2,…,Rn},其中 Ri代表不同類型的輻射源。D-S證據理論用識別框架 U表示所感興趣的命題集,它定義識別框架 U上的基本概率賦值函數m:2U→[0,1],滿足:

式中,命題 A是 U的非空子集,稱為焦元,m(A)反映了對命題 A信任的程度。
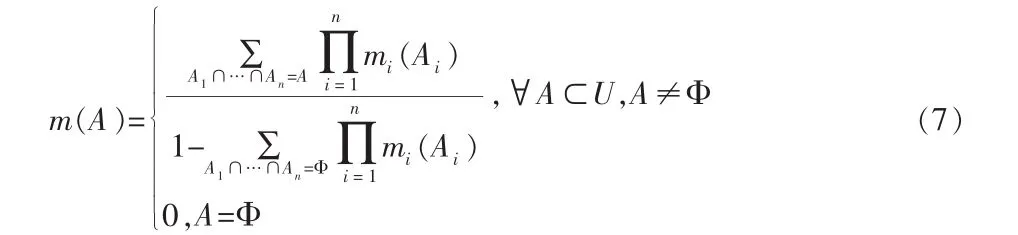
如果m1,m2,…,mn是在同一識別框架 U上根據n個獨立振動傳感器的證據所獲得的基本概率賦值函數,則可以利用式(8)的Dempster組合規則計算出這n個證據共同作用下的基本值函數:
2.2 基于基本概率賦值的判決準則
用證據理論組合證據后如何進行決策,是與具體應用密切相關的問題。常用的決策方法有基于信任函數的決策、基于基本小風險的決策。本文在融合不同振動傳感器的證據后,采用基于基本概率賦值的決策,來識別不同類型的輻射源。假設U是識別框架,m是利用Dempster組合規則將n個不同電子偵察傳感器的證據融合后的基本概率賦值。
假設存在?A1,A2?U,滿足:

若有

則A1為最終的輻射源識別結果,其中ε1、ε2為預先設定的門限,m(U)表示不確定結果的基本概率賦值。
3 目標識別算法的步驟
綜合上述分析,下面給出基于多傳感器多特征的目標識別算法,其具體步驟如下:
3.1 由(1)式得到各傳感器對應的增廣特征指標矩陣
3.2 由(3)式得到距離矩陣
3.3 由(4)式得到區間灰關聯系數矩陣
3.4 利用(6)和(7)式得到屬性權重向量
3.5 由(5)式得到各目標類型與未知目標X的區間灰關聯度
3.6 獲取基本概率賦值函數,其公式如下:
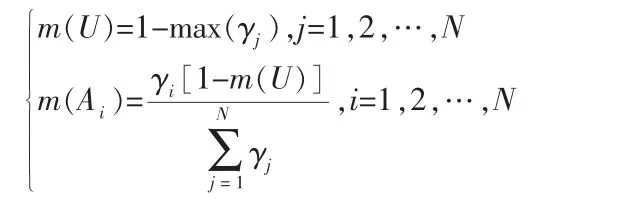
其中,m(U)是不確定結果的基本概率賦值。
3.7 根據Dempster組合規則融合多個證據體基本概率賦值
3.8 根據(8)和(9)做出判決
4 應用舉例
假設振源識別框架為U={大車,小車,人},選取過零數、信號功率譜和信號持續時間作為特征參數。參考數列通過各傳感器的實時探測獲取,比較數列為振源數據庫中各振源數據。表1給出了U中各振源的特征參數,表2為3個振動傳感器獲得的對大車的3組測量值θij和標準方差δij(括號內為標準方差)。
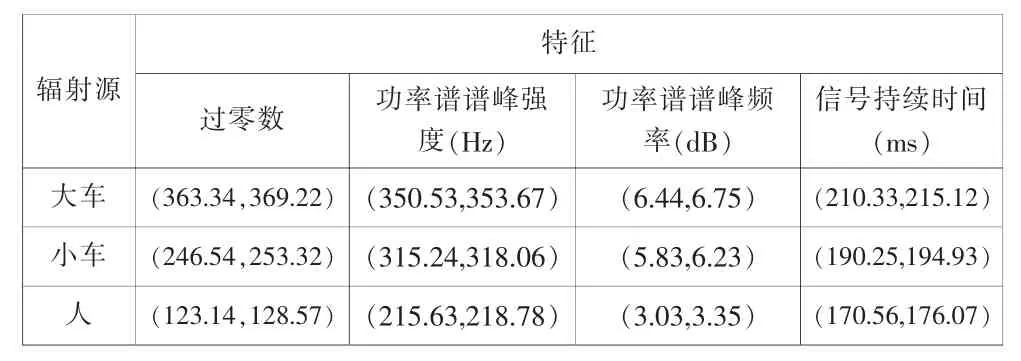
表1
由此便可以上述方法計算出各傳感器的對于各目標類型的基本概率賦值及證據融合后的結果,如表2所示。
在表2中根據三個傳感器的基本概率賦值進行證據融合,最終得到判決結果是大車。由此可見,本算法通過灰關聯理論和D-S證據理論融合了多個傳感器的數據來確定目標的特征參數,克服了單一的數據融合方法具有局限性,能有效地解決干擾存在下的目標分類識別問題。
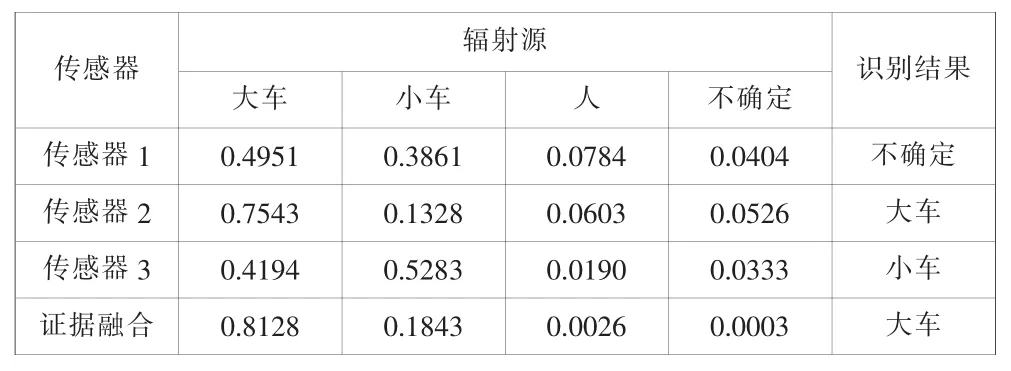
表2
5 結束語
本文提出了通過區間灰色關聯算法獲取多個傳感器證據的基本概函數,根據證據理論融合多個傳感器的證據,采用基于基本概率賦值的決策準則來識別振動源的方法。該方法將傳感器的測量值和目標特征參數模糊化,用區間數來表達不確定性,提出了基于區間灰色關聯的數據融合方法,利用熵權克服了傳統方法中屬性權重選取的主觀性問題,使得目標識別結果具有可信度高、更加符合實際的優點,為解決多傳感器信息融合問題提供了新的途徑。
[1]李楠,曲長文,等.灰色關聯理論在輻射源識別中的應用[J].系統仿真學報,2009(78):96-98.
[2]Da R,Lin C F.A new failure detection approach and its application to GPS autonomous integrity monitoring[J].IEEE Trans.on Aerospace and Electronic Systems,1995,31(l):499-506.
[3]趙艷玲,門麗潔.基于灰色關聯分析的艦船目標分類識別[J].艦船科學技術,2009,31(10):36-38.
[4]林云,司錫才,等.改進灰色關聯算法在輻射源識別中的應用[J].通信學報,2010,31(8A):166-171.
[5]劉君華,湯曉軍,等.智能傳感器系統[M].西安:西安電子科技大學出版社,2010.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
當代陜西(2019年15期)2019-09-02 01:52:00
學苑創造·A版(2018年11期)2018-02-01 06:29:20