改進單神經(jīng)元PID用于預(yù)防水輪機組功率振蕩
2013-08-11 06:04:38李曉嬌孫建平劉友寬高東磊張建輝
電力科學(xué)與工程 2013年9期
李曉嬌,孫建平,劉友寬,高東磊,張建輝
(1.華北電力大學(xué) 控制與計算機工程學(xué)院,河北 保定 071003;2.云南電網(wǎng)電力研究院,云南 昆明 650217)
0 引言
低頻振蕩是指電力系統(tǒng)中聯(lián)絡(luò)線上有功功率在振蕩頻率為0.2~2.5 Hz范圍內(nèi)波動。低頻振蕩對電網(wǎng)的安全穩(wěn)定運行造成了嚴重的威脅。研究表明,原動機側(cè)的功率波動是造成電網(wǎng)低頻振蕩的原因之一。發(fā)電機組是整個電力系統(tǒng)的源頭,只有保證發(fā)電機組出力穩(wěn)定,才能保證電力系統(tǒng)的正常運行。水電機組在運行過程中所處的工況經(jīng)常會偏離額定工況,如水輪機組的水頭會發(fā)生偏離額定水頭的情況。在這種情況下,因被控對象特性發(fā)生變化,經(jīng)典PID控制器的控制效果會變差。因此采用自適應(yīng)PID來進行控制是十分必要的。常用的自適應(yīng)PID有模糊控制PID、專家控制PID、單神經(jīng)元PID等。前兩者需要豐富的工作經(jīng)驗來做依托,具有局限性。本文針對云南某水電機組模型,采用改進單神經(jīng)元PID進行控制。該控制器可根據(jù)水頭變化調(diào)整參數(shù),消除工況變化對機組功率控制品質(zhì)的影響。
1 單神經(jīng)元PID
單神經(jīng)元PID控制器 (圖1)綜合了單神經(jīng)元自適應(yīng)能力強及PID控制簡單且精度高的優(yōu)點,使控制器具有了自適應(yīng)能力,增強了系統(tǒng)的魯棒性。
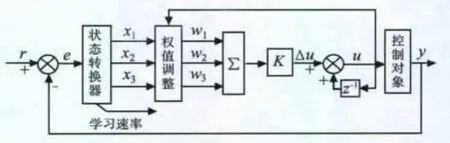
圖1 單神經(jīng)元自適應(yīng)PID控制結(jié)構(gòu)Fig.1 Structure of single neuron PID controller system
單神經(jīng)元的輸入為:

式中:e(k)=r(k)-y(k)。
單神經(jīng)元PID控制器通過調(diào)整加權(quán)系數(shù)實現(xiàn)了自適應(yīng)、自組織的功能。權(quán)系數(shù)的調(diào)整按照有監(jiān)督的 Hebb學(xué)習(xí)規(guī)則實現(xiàn),3個權(quán)值更新規(guī)則為:
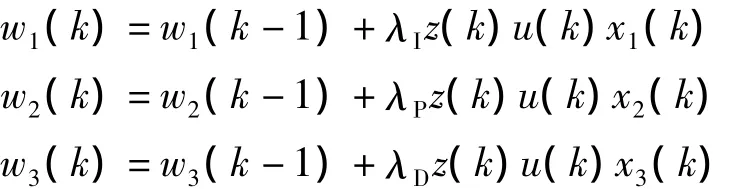
式中:z(k)=e(k);λI,λp,λD為積分 I、比例 P和微分D的學(xué)習(xí)速率,采用不同的學(xué)習(xí)速率以便對不同的權(quán)系數(shù)進行調(diào)整。
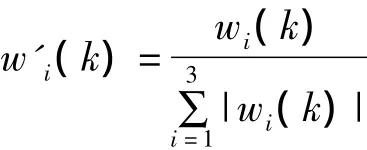
單神經(jīng)元PID控制器的控制率可以表示為:

式中:K為單神經(jīng)元控制器的比例系數(shù)。
通過總結(jié)大量的工程應(yīng)用實踐可知,單神經(jīng)元PID控制算法中加權(quán)系數(shù)的學(xué)習(xí)修正主要與e(k)和Δe(k)有關(guān),可將其中的xi(k)改為e(k)+Δe(k),改進后的控制算法與學(xué)習(xí)算法為:
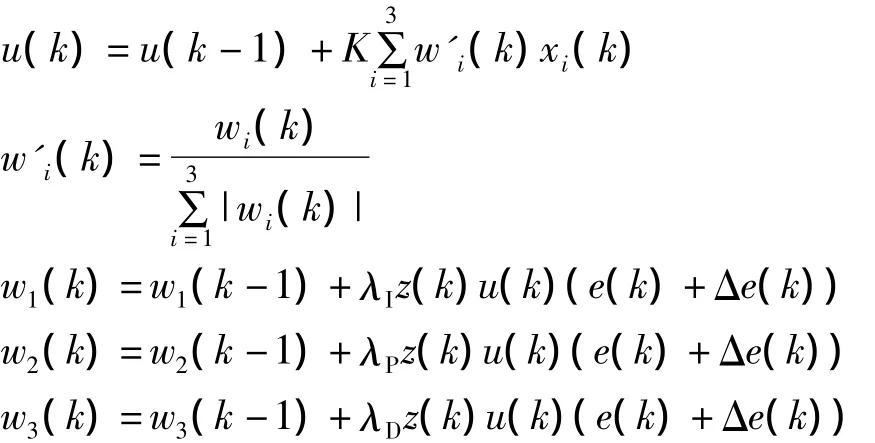
式中:Δe(k)=e(k)-e(k-1),z(k)=e(k)。
改進單神經(jīng)元PID控制器中權(quán)值系數(shù)的在線修正參考了實際經(jīng)驗,不完全依據(jù)神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)原理,因此學(xué)習(xí)算法達到了較好的運行效果。
2 改進單神經(jīng)元PID在水輪機組中的應(yīng)用
2.1 水頭對水輪機組功率的影響
水輪機輸出功率P為通過水輪機的水流所具有的水力功率,通常以kW為單位,計算公式為:

式中:ρ為水的密度;g為當(dāng)?shù)刂亓铀俣?Q為水輪機的流量;H是水輪機的工作水頭。
通過水輪機的相似原理可知,幾何相似的水輪機在相似工況下,流量與水頭的平方根成正比,與直徑的平方成正比。
由水輪機的出力公式可知,機組出力與水頭和流量成正比。因此,幾何相似的水輪機在相似工況下,出力與水頭的1.5次方成正比,與直徑的平方成正比。同一臺水輪機一定為幾何相似的水輪機,直徑的比值是固定值1。由以上分析可得水輪機組的出力與水頭的1.5次方成正比。
以云南某水電機組為研究對象,在其水輪機調(diào)速系統(tǒng)模型中按照水頭和機組出力的關(guān)系引入水頭干擾。水輪機組額定水頭為86 m,在Simulink中分別模擬水頭為 60 m,70 m,110 m,130 m時,經(jīng)典PID控制器的控制效果,仿真結(jié)果如圖2。
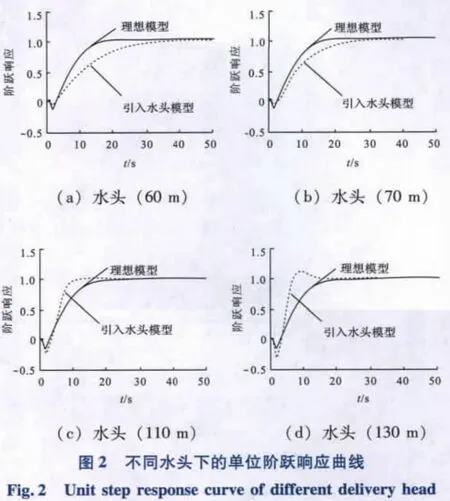
由圖2可知,當(dāng)水頭偏離額定水頭時,經(jīng)典PID的控制效果會變差,無法滿足控制要求。
2.2 改進單神經(jīng)元PID在消除水頭變化影響方面的應(yīng)用
水頭變化導(dǎo)致做功介質(zhì)的做功能力發(fā)生變化,即水輪機組功率控制回路的被控對象增益發(fā)生了變化。在水頭為100 m和130 m的工況下,分別采用經(jīng)典PID控制器與改進單神經(jīng)元PID控制器來對水輪機組進行控制。在simulink中進行建模仿真,結(jié)果如圖3和圖4。
由圖3和圖4可以看出,當(dāng)水頭偏離額定水頭時,經(jīng)典PID控制器無法適應(yīng)工況的變化,控制效果明顯變差,甚至出現(xiàn)了超調(diào)。這種情況可能導(dǎo)致機組有功功率發(fā)生波動,引起機組功率振蕩和電網(wǎng)的低頻振蕩。采用改進單神經(jīng)元PID控制器后,盡管水頭發(fā)生了變化,但其控制效果仍與額定水頭下的控制效果相近,沒有出現(xiàn)超調(diào),控制品質(zhì)較好。可知改進單神經(jīng)元PID控制器的魯棒性強,能夠根據(jù)工況變化調(diào)整控制器參數(shù),很好地消除了水頭變化對機組功率的影響。


3 結(jié)論
保證水輪機組的穩(wěn)定出力對于整個電網(wǎng)的安全穩(wěn)定都有重要的意義。機組實際運行過程中,水頭會發(fā)生偏離額定水頭的情況。由分析可知,機組出力與水頭的1.5次方成正比,水頭的變化會導(dǎo)致功率控制回路增益發(fā)生變化,因此,在功率控制回路中應(yīng)考慮水頭因素的影響。現(xiàn)在水電廠普遍采用的經(jīng)典PID控制器,無法適應(yīng)水頭的變化,當(dāng)水頭變化時控制品質(zhì)會變差。本文提出了一種采用改進單神經(jīng)元PID控制器來代替功率控制回路中經(jīng)典PID控制器的方法。仿真表明,該方法能夠根據(jù)水頭變化調(diào)整控制器參數(shù),實現(xiàn)較好的控制效果,保證水輪機組的穩(wěn)定出力。
