多自由度遙操作系統的適應性波預測控制
2013-08-04 02:24:28江南大學輕工過程先進控制教育部重點實驗室江蘇無錫214122
計算機工程與應用 2013年11期
關鍵詞:模型
江南大學 輕工過程先進控制教育部重點實驗室,江蘇 無錫 214122
江南大學 輕工過程先進控制教育部重點實驗室,江蘇 無錫 214122
基于無源性理論[1]的波變量方法[2]用于遙操作系統的控制能夠保證系統在任意時延條件下的穩定性,但是存在透明性較差的缺點。將預測技術與波變量方法結合,同時利用預測器的預測效果和波變量法的魯棒穩定性,能夠在保證系統穩定的基礎上提高系統的透明性[3-8]。系統執行任務過程中,從端環境往往是變化的,例如從端機器人從自由空間到剛性接觸的過程中,預測模型和實際模型就產生了偏差。錯誤的預測模型會影響遙操作系統的穩定性和透明性[9]。要求預測模型能夠隨著從端環境的變化而變化,目前這種具有適應能力的遙操作系統的波預測方法研究得還很少。此外,目前大多數有關波變量的研究都是針對單自由度的主從遙操作系統。實際上,就遙操作系統的應用背景來看,多數情況下系統具有多個自由度。因此,研究多自由度遙操作系統的波預測控制更具有意義。
本文首先介紹多自由度遙操作系統的波變量法;然后,設計遙操作系統的波預測控制模型并針對從端模型變化的作業任務,設計適應性波預測的控制策略。
1 遙操作系統的波變量法
1.1 波變量法
波變量方法中,速度x˙和力 f在傳輸之前轉化為波變量u和v,信號到達另一端后再從波變量中解出速度和力信息。主端的波變換公式為:

從端的波變換公式為:

式中,對于單自由度系統b為波阻抗,fm為從端反饋回主端的力,fc為從端控制器產生的力,xm為主端機器人的位置,xsd為從端機器人的期望位置,xs為從手的位置,Tms和Tsm為主端到從端和從端到主端的通信時延。
1.2 多自由度系統的波變換公式
將波阻抗b用波阻抗矩陣代替,則波變換方程的一般形式為:

和

式中Aw,Bw,Cw和Dw為n×n的波阻抗矩陣,n表示遙操作系統的自由度數。波阻抗矩陣不能任意選擇,需要滿足無源性的條件[10]。
1.3 波阻抗矩陣的選擇原則
定義多自由度系統主從端功率流:

將式(3)和式(4)帶入式(5)得到:

對式(7)的矩陣系數進行擴展和匹配可以得到:

對式(7)進行變形得到:

由式(9)得到矩陣系數的約束關系:

文獻[10]根據式(8)和式(10)選擇波阻抗矩陣滿足:

則式(10)變為:

式(11)和式(12)中的阻抗矩陣要求為非奇異矩陣,且Aw為對稱矩陣,但無需正定。
2 遙操作系統的波預測法
遙操作系統的波預測控制結構如圖1所示。圖中Gm(s)為主操作手的傳遞函數,Gs(s)為從操作手和其控制器總的傳遞函數,GR(s)為右半部分總的傳遞函數,Gp′(s)為預測器的傳遞函數;Tms和Tsm分別表示主端到從端和從端到主端的傳輸時延;um為前向波,vm為返回波。綜合器用來融合預測信號和從端反饋信號,并保證預測器無源。
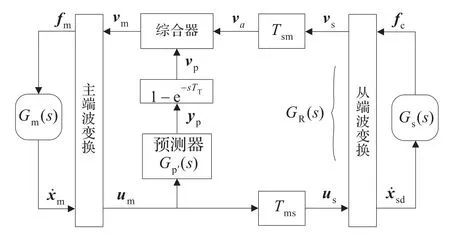
圖1 遙操作系統的波預測雙邊控制結構圖
首先,從端的PD控制器參數、波變換參數、從手模型等參數信息直接發送到主操作端,作為主操作端預測器的初始條件。由于初始條件傳輸到主端過程中延時了TT(TT=Tsm+Tms)(單位:s),因此,預測器是使用從端過去的狀態來預測從端當前的狀態。由圖1可以得到預測器的方程為:

采用綜合器將vp和va合并生成um。該控制結構下,當預測模型能夠精確地描述從端模型時,主端幾乎感覺不到時延的影響。
定義輸入輸出綜合器的波變量流的差積分為:

為保證系統的無源性,定義“能量池(energy reservoir)”來跟蹤綜合器提取的能量:

因此,可定義綜合器輸出的波變量vm為:

式中,α和β為正的調節因子,α決定Dr(t)耗散的快慢,β決定能量池的大小。由式(16)可以看出,如果能量池的能量完全排空,則綜合器輸出為0(即vm=0),保證了系統的無源性。能量池不宜選擇得太大,即 β的取值不能過大,因為當能量池中的能量很多時,耗散必然費時,不符合無源性的原則。此外,在系統運行之初綜合器需要一定時間來初始化參數并建立能量池。
3 遙操作系統的適應性波預測法
設計適應性波預測控制模型如圖2所示。先為波預測器建立一個模型庫,模型庫里包含了幾個簡單的預測模型,如從端機器人在自由空間和剛性接觸時的模型。從端的決策器中也事先存儲了模型庫里模型的參數信息。在從端使用遞歸最小二乘法(Recursive Least-Square,RLS)根據從端平臺的輸入輸出以及傳感器的測量結果來估計從端的參數。決策器根據這些參數判斷主端的模型庫中是否已有相應模型,若有相應模型,則只發出模型選擇標識,主端根據該標識選擇當前的預測模型。如果模型庫中沒有相應的預測模型,決策器將把RLS獲得的從端模型參數發至主端,同時決策器保存此模型的參數信息,主端根據從端的模型信息建立新的預測模型并將其添加到模型庫中,下次再遇到同樣的作業任務時不需要重新建立模型。
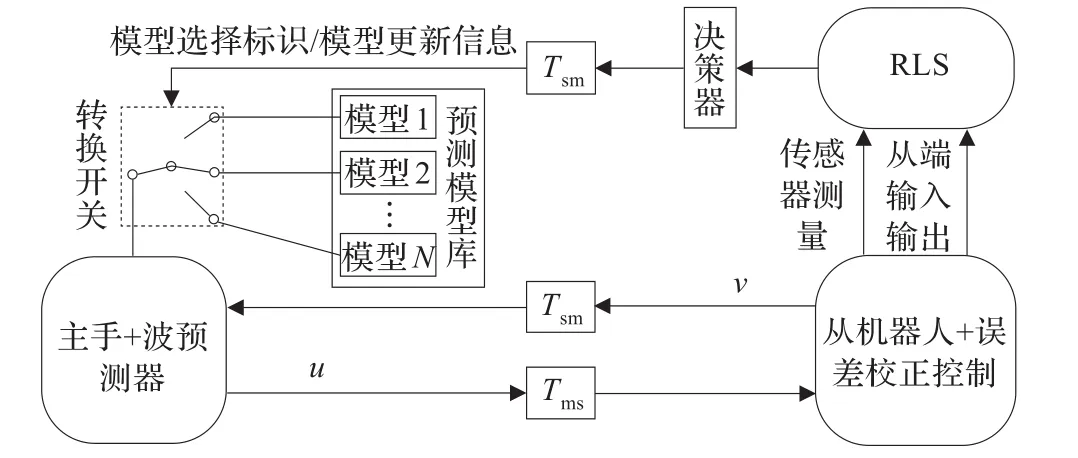
圖2 適應性波預測控制策略
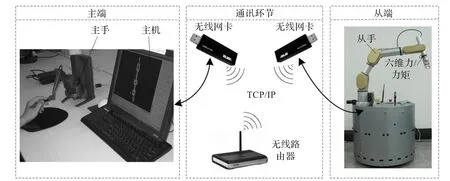
圖3 實驗系統物理結構圖
在某些情況下,預測模型的突然轉換可能引起系統的不穩定。從圖2可以看出,預測器的校正、RLS以及預測器的轉換都會通過預測器的綜合器,綜合器能夠通過跟蹤反饋的能量流保證系統的無源性。
從圖2可以看出,決策器的決策結果傳輸到主端要經過Tsm的延時。當從端機器人從自由空間運動到剛性接觸時,操作者感受到的從端機器人與環境接觸的力要晚于實際接觸力Tsm,如果不知道從端環境和接觸點的先驗知識,則這種情況將無法避免,可以在從端機器人上安裝傳感器獲得從端的先驗知識。當從端機器人從剛性接觸返回到自由空間時,預測器可以利用新獲得的接觸點位置,預期機器人何時返回到自由空間。因此,開始時可以控制機器人慢速的接觸剛性環境,獲得臨時的環境先驗知識,預測器可以根據此先驗知識修正預測器模型而不受時延的影響。
4 實驗
為了驗證所研究方法的有效性設計操作臂末端在自由空間和剛性接觸環境的遙操作實驗。
實驗系統硬件配置如圖3所示,主從端設在同一地點,采用無線局域網進行通信,使用軟件模擬網絡傳輸時延為0.5 s。主手為一臺PHANTOM Desktop型力反饋主手,具有三維力覺,從手為自主研制的六自由度串聯機械臂,實驗中只考慮其前三個關節,因此該系統為三自由度的遙操作系統。
主操作手具有三個方向的力覺,六個關節的位置,與從操作臂同構。操作臂為自主研制的六自由度串聯式機械臂。建立操作臂的拉格朗日動力學方程為式(17),反饋回主端的各關節扭矩由該式產生。

選擇預測模型綜合器的參數α=20,β=1.5;選擇校正控制算法的參數γ=10,δ=2;波阻抗矩陣選擇為:

實驗中,操作者控制操作臂多次在豎直方向上從自由空間到剛性接觸運動。從自由空間到剛性接觸的實驗中,操作臂末端的力和操作臂的接觸狀態使用六維力/力矩傳感器直接測量,由測量的力值建立或選擇新的預測模型,并通過力雅可比矩陣將接觸力解算到關節力矩并反饋到主端。
實驗結果以主從機器人肩關節(第二關節)的扭矩和位置跟蹤曲線為例分析所研究方法的有效性,主從端的扭矩和位置曲線重合度越好,說明系統透明性也越好。主從端系統運行無發散現象,證明系統穩定。
位置和力的采樣周期為0.05 s。為了增強曲線圖的可讀性,對圖中的曲線做了一定的平滑處理。實驗結果如圖4和圖5所示。從圖中的主從端角度和力矩跟蹤曲線可以看出從端機器人能夠較好地跟隨主操作手運動;因此,適應性波預測方法能夠保證系統的穩定性,并具有較高的透明性。且該方法能夠適用于從端模型變化的情況。
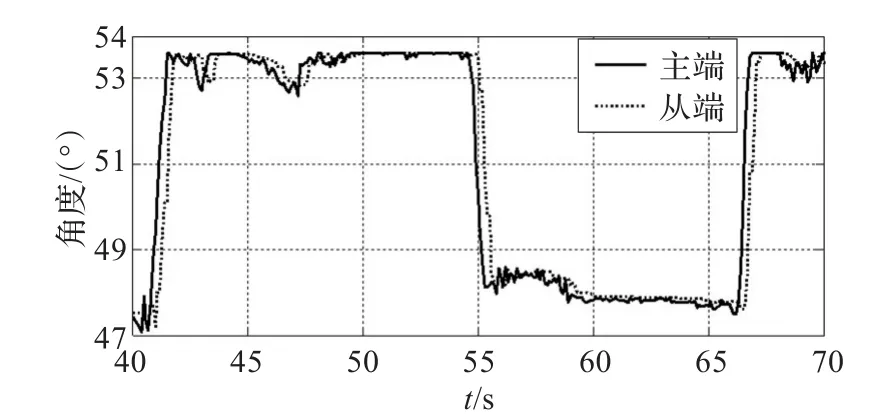
圖4 主從端角度跟蹤曲線
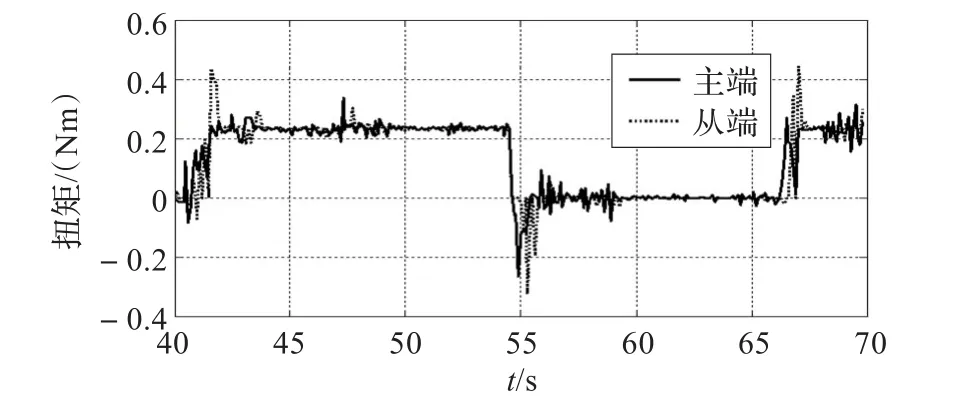
圖5 主從端力矩跟蹤曲線
5 結論
提出了一種適應性的波預測控制策略來適應遙操作系統從端模型變化的作業任務,提高控制方法適應復雜作業任務的能力。實驗結果表明,適應性波預測器能夠適應從端模型變化的作業任務,能夠保證從端模型變化的遙操作系統的穩定性,并保證系統具有較高的透明性。
[1]Anderson R J,Spong M W.Bilateral control of teleoperators with time delay[J].IEEE Transactions on Automatic Control,1989,34(5):494-501.
[2]Niemeyer G,Slotine J J E.Stable adaptive teleoperation[J]. IEEE Journal of Oceanic Engineering,1991,16(1):152-162.
[3]Munir S,Book W J.Control techniques and programming issues for time delayed Internet based teleoperation[J].Journal of Dynamic Systems,Measurement,and Control,2003,125(2):205-214.
[4]Ching H,Book W J.Internet-based bilateralteleoperation based on wave variable with adaptive predictor and direct drift control[J].Journal of Dynamic System,Measurement,and Control,2006,128(3):86-93.
[5]Smith C,Jensfelt P.A predictor for operator input for timedelayed teleoperation[J].Mechatronics,2010,20(7):778-786.
[6]Munir S,Book W J.Internet-based teleoperation using wave variables with prediction[J].IEEE/ASME Transactions on Mechatronics,2002,7(2):124-133.
[7]于振中,閆繼宏.波域預測三通道時延雙邊遙操作[J].吉林大學學報:工學版,2011,41(4):1096-1101.
[8]于振中,閆繼宏.利用波域預測的四通道時延雙邊遙操作[J].華中科技大學學報,2010,38(5):32-38.
[9]Munir S,Book W J.Internet-based teleoperation using wave variables with prediction[J].IEEE/ASME Transactions on Mechatronics,2002,7(2):124-133.
[10]Hannaford B,Ryu J H.Time domain passivity control of haptic interfaces[C]//Proceedings International Conference on Robotics and Automation,2001:1863-1869.
多自由度遙操作系統的適應性波預測控制
于振中,惠 晶,馬勇虎
YU Zhenzhong,HUI Jing,MAYonghu
Key Lab of Advanced Process Control for Light Industry(MoE),Jiangnan University,Wuxi,Jiangsu 214122,China
To overcome the poor adaptive problem of wave prediction method in Multi-DOF teleoperation system,a novel method with adaptive wave predictor is proposed.The method incorporates wave variable and adaptive predictor to insure the stability and improve the transparency and adaptability of the teleoperation system.A three-DOF teleoperation experiment is established to verify the validity of aforementioned method,and the experimental results show that the adaptive predictor can adapt the vary operating environment,the teleoperation system is stability and with high transparency.
teleoperation;wave variable;wave variable with prediction;adaptive
針對波預測方法用于多自由度遙操作系統預測模型適應性差的問題,提出了適應性波預測的控制方法。該方法利用波變量、適應性預測器來保證遙操作系統的穩定并提高系統的透明性和適應復雜多變作業任務的能力。設計三自由度主從遙操作實驗,實驗結果表明具有適應性的波預測器能夠適應從端模型變化的作業環境,系統穩定且具有較高的透明性。
遙操作;波變量;波預測;適應性
A
TB486
10.3778/j.issn.1002-8331.1110-0337
YU Zhenzhong,HUI Jing,MA Yonghu.Wave varible with adaptive predictor in multi-DOF teleoperation system.Computer Engineering and Applications,2013,49(11):261-264.
國家高技術研究發展計劃(863)(No.2006AA04Z245);中央高校基本科研專項資金項目(No.JUSRP11A48)。
于振中(1980—),男,博士,講師,研究方向:機器人遙操作技術。E-mail:yzzrobot@126.com
2011-10-18
2011-12-22
1002-8331(2013)11-0261-04
CNKI出版日期:2012-03-21 http://www.cnki.net/kcms/detail/11.2127.TP.20120321.1733.008.html
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19