欠驅動船舶的運動規劃和全局指數跟蹤控制
2013-07-11 09:35:26朱齊丹劉志林
計算機工程與應用 2013年5期
王 巖,朱齊丹,劉志林,楊 震
哈爾濱工程大學 自動化學院,哈爾濱 150001
欠驅動船舶的運動規劃和全局指數跟蹤控制
王 巖,朱齊丹,劉志林,楊 震
哈爾濱工程大學 自動化學院,哈爾濱 150001
1 引言
近年來,欠驅動系統的運動控制問題一直是倍受關注的研究熱點。欠驅動水面船舶(Underactuated Surface Vessels,USV)由于橫向上未裝備驅動裝置,缺少可用的控制輸入,因此針對一般運動系統的基于向量的控制器設計方法不能有效地用以解決USV的運動控制問題[1-2]。欠驅動船舶執行跟蹤敵對目標、巡邏勘察、近遠程避障等作戰任務時,均需要以一定的速度沿著指定的目標航跡航行。因此航跡跟蹤控制系統是USV使命中重要的組成部分。在航跡跟蹤控制器設計過程中,期望連續可導的目標信號,然而在實際中這種連續可導的目標航跡是難以指定的,甚至是不可實現的,比如在避障控制中目標航跡是復雜多變的,如此連續多變的目標航跡幾乎是難以設計的。即使在執行簡單的航跡跟蹤任務中,連續的目標航跡可以給出,此時設計出來的航跡跟蹤控制器也無法具有普遍意義,難以推廣到操縱性、實時性和路況復雜多變的環境中。因此設計離散目標點指導下的航跡跟蹤控制方法就成為實現USV航跡跟蹤控制的迫切需要,并可廣泛應用到多種操縱控制任務中。而運動規劃算法可以將離散的目標位置點轉為期望的連續航跡信號和符合安全運動約束的期望姿態信息,可兼顧實用性和控制器設計方便的雙重需要。
目前對于USV的航跡跟蹤的研究,主要存在兩條不同的研究路線:一種是基于虛擬指導船舶的航跡跟蹤控制方法[3-8],另外一種是基于運動學和動力學回路的跟蹤控制方法。所謂的虛擬船舶是指控制器設計中存在一個虛擬運動的船舶,該船舶的附加質量和水動力系數與實際受控船舶一致,在期望的縱向推力和轉向力矩驅動下由虛擬指導船舶實時產生實際受控船舶的操縱運動可物理實現的期望航跡和期望運動姿態。虛擬船舶方法存在的主要問題是:由于難以預知復雜的期望航跡的參考控制輸入,導致所設計的航跡跟蹤控制器難以跟蹤任意指定航跡,即使是操縱運動可實現的。因此,文獻[3-8]在仿真或實驗都是跟蹤一條指定的圓或圓弧航跡。但優勢為不僅可以跟蹤指定的位置變量,還可以同時實現對艏搖角、艏搖角速度、縱向速度、側向速度的姿態跟蹤。基于運動學和動力學回路的跟蹤控制方法僅僅能夠實現USV的期望位置跟蹤,不能實現其他姿態的跟蹤[9-10]。而且也未能解決關于在未知復雜的環境下如何得到符合安全運動約束和動力學條件約束的連續期望航跡問題。
從工程角度出發,為實現欠驅動船舶的航跡跟蹤控制器應用于實際問題,本文主要由以下幾部分組成:首先,為解決欠驅動船舶不能跟蹤任意指定航跡問題,運用運動規劃方法,利用離散目標點規劃出符合動力學約束的連續期望軌跡;其次,引入微分同胚變換,建立兩個級聯子系統構成的航跡跟蹤誤差動態方程,并運用反步法對變換后的誤差子系統設計了全局指數狀態反饋控制律。最后利用本文提出的基于規劃期望軌跡的全局指數航跡跟蹤控器進行了仿真實驗,結果表明所提出的方法能有效地實現USV航跡的精確跟蹤。
2 欠驅動船舶的運動模型
考慮如下欠驅動水面船舶模型[11]:

3 規劃期望航跡
運動規劃算法以離散的目標位置點為基本信息,通過樣條函數對目標位置點進行分段擬合,不僅輸出分段連續的期望航跡,同時輸出具有安全運動約束的目標姿態,形成航跡跟蹤控制器有效的期望輸入,從而實現姿態約束及安全運動約束條件下的USV航跡跟蹤控制,既能充分發揮USV優良的操縱性能,又能實現良好的跟蹤控制性能。
基于運動規劃的USV航跡跟蹤控制分為4個步驟:

(2)根據連續化航跡信息,估計USV的姿態信息(-u,-v,-ψ,-r)。
(3)利用動力學特性獲得期望的控制輸入(τ1d,τ3d),由此確定被跟蹤的期望姿態(xd,yd,ψd,ud,vd,rd)。
(4)設計航跡跟蹤控制器,跟蹤期望姿態(xd,yd,ψd,ud,vd,rd)。
3.1 參考航跡的多項式擬合
假設離散目標點 (xk-1,yk-1)、(xk,yk)和 (xk,yk)、(xk+1,yk+1)分別存在曲線Sk-1(θ)和Sk(θ),其中θ為參考期望軌跡參數。
定義向量θVEC為:



因此,根據式(1),大地坐標系下的船速Ud() t為:

若船舶航速的動態特性可以表征為:

式(5)和(6)聯立,可知θ(t)和Ud(t)的動態變化過程為:
其中,Uref為參考速度,Ts為速度動態時間常數。
下面需要根據連續性條件確定目標航跡的軌跡參數[a3a2a1a0]T和[b3b2b1b0]T。
易知,若存在N+1個點,則存在N個曲線S,也即存在4N個參數對(a,b)。因此,需要建立4N個約束方程,以確定擬合參數。
這里,以某連續的三個離散點為例,存在連續曲線Sk-1(θ)和Sk(θ),應滿足連續性條件為:

若Sk-1(θ)和Sk(θ)對軌跡參數變量θ的一階和二階導數滿足連續條件:

因為連續性及可導性條件是對于單點闡述的,因此除首尾兩個點外,可以建立4(N-1)個方程。同時,首尾點位于首尾曲線S1(θ)和SN(θ)上并滿足可導性條件,這樣一共可建立4N個約束方程,由此可確定式(3)中的4N個軌跡參數。
3.2 參考姿態的估計

考慮USV已跟蹤上目標軌跡,根據式(1)可知:




圖1 航跡向、真航向和漂角三者間關系

式(15)的微分結果為:

同時,根據式(15)可知:

根據式(14),結合式(10)、(13)和(15)可以計算得出當軌跡不為直線時,角速度的計算公式為:



至此,可以總結船舶參考狀態的估算過程:首先,根據已知參考航跡和,通過式(19)和(20)能夠計算得出USV縱向速度,之后根據式(15)計算得到側移速度,最后根據式(14)和(18)計算得到航向角和航向角速度。
3.3 期望控制輸入的規劃
前面兩節已經給出USV運動可行的連續參考軌跡、航向角和船體坐標系下的所有速度和加速度,下面將利用USV的動力學模型(1)直接計算得出相應開環期望控制輸入:

將式(21)和(22)中的期望控制輸入(τud,τrd)代入整個運動方程(1),可求得USV的操作性可實現的期望航跡(xd,yd,ψd,ud,vd,rd)。
運動規劃算法和開環控制律(21)、(22)可以看作是設計閉環軌跡跟蹤控制律的一部分。當USV在跟蹤軌跡上,且模型精確,同時不存在外界干擾時,開環控制律(21)、(22)能有效保證USV的精確跟蹤。但是,由于模型的不確定性等原因,需要設計帶有反饋的閉環控制率以保證USV的精確跟蹤。
4 指數跟蹤控制器設計
由上章可得根據期望點所設計的物理可實現期望軌跡(xd,yd,ψd,ud,vd,rd)和期望輸入(τ1d,τ3d),滿足:

4.1 控制目標的分解簡化
為利于控制器設計,引入狀態變換和輸入變換[5]:

則整理后新的動態方程為:

同理,經坐標變換:

則有:

定義跟蹤誤差:

則有:

引理1[6]如果存在一種控制律使得系統(31)全局指數穩定,則該控制律同樣能使得系統(30)全局指數穩定。
在接下來的控制器設計中,只需要考慮設計反饋控制律使得系統(31)全局指數穩定即可。
將系統(31)表示成如下兩個子系統:

由此控制目標可通過如下兩個步驟實現:
步驟1將z6e=σ看成虛擬控制輸入,設計部分狀態反饋控制律w2使得系統(32)全局指數穩定。
步驟2設計部分狀態反饋控制律w1使得系統(33)全局指數穩定。
4.2 步驟1的實現
定理1針對線性系統(32),易構造如下控制律:使得其閉環系統全局指數穩定(GES)。


4.3 步驟2的實現
定理2對于系統(33),若rd滿足標準激勵條件:

其中,δ>0,則在控制律(36)作用下的閉環系統GES。

針對系統(33),定義變量σ=z4e+k3z6dz2e,z6d≠0,則有:

定義如下Lyapunov函數:

求導并代入控制律(36),則


由比較定理[12]:

由于z4d、z6d(rd)有界,且當t→∞時,z6e→0,顯然W收斂到0,因此V收斂到0,進而,當t→∞時,z2e,σ→0,因此當t→∞時,z4e→0。
4.4 控制目標的實現

定理3在控制律:的作用下誤差系統(30)和(31)的閉環系統GES。
證明 由引理1、定理1、定理2可知。
由定理3,可知ze全局指數收斂于零,則有(x-xd,y-yd,ψ-ψd,u-ud,v-vd,r-rd)全局指數收斂于零,從而實現了欠驅動船舶對任意可行航跡的全局指數跟蹤控制。
5 仿真結果
將通過仿真實驗驗證所提控制律的實際有效性,仿真環境基于MATLAB/SIMULINK工具搭建。期望狀態(xd,yd,ψd,ud,vd,rd)和船舶狀態(x,y,ψ,u,v,r)經過微分同胚變換后構成了整個控制器的輸入,經控制律(42)解算后得到船舶的實際控制輸入,從而完成輸出反饋控制律的閉環仿真驗證。仿真中所選船模的參數為[5]:m11=200kg,m22=250kg,m33=80kg,d11=70kg/s,d22=100kg/s,d33= 50kg/s。船舶的初始狀態設為(x(0),y(0),ψ(0),u(0),v(0),r(0))= (0,-2,0,0,0,0)。控制律(42)中的控制參數設為k1=1,k2=1.2,k3=6,k3=1.6,滿足定理3中穩定性分析中確定的參數限定條件。離散的期望點為:yk=[-0.5,0,2,2,3,4,5.5],xk=[0,0.6,1.5,3,4,4,32]。仿真結果如圖2~6所示。
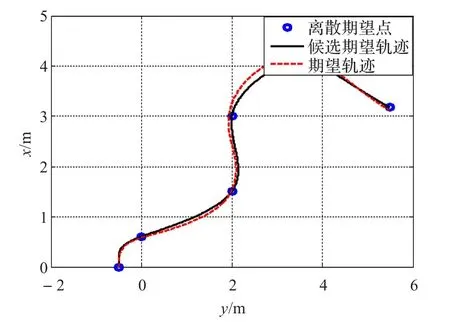
圖2 規劃期望軌跡

圖3 船舶的實際與期望位置和艏搖響應


圖4 船舶的實際與期望的速度和角速度響應

圖5 實際與期望的控制輸入

圖6 實際航跡與期望航跡
6 結束語
通過對USV航跡跟蹤的研究,利用多項式擬合獲得連續參考軌跡,進而估計各個參考姿態;結合參考姿態和船舶動力學模型,得到期望的控制輸入,進而規劃出操作性可實現的全部期望姿態。同時,為實現欠驅動船舶的航跡快速跟蹤控制,引入微分同胚變換,基于反步法設計原理,針對變換后的誤差動態方程設計了全局指數狀態反饋航跡跟蹤控制律,實現了欠驅動USV在任意可行航跡條件下的全局指數航跡跟蹤控制。
[1]高炳團,陳宏鈞,張曉華.欠驅動機械系統控制設計綜述[J].電機與控制學報,2006,10(5):541-546.
[2]郭晨,汪洋,孫福春,等.欠驅動水面船舶運動控制研究綜述[J].控制與決策,2009,24(3):321-329.
[3]Lefeber E,Pettersen K Y,Nijmeijer H.Tracking control of an underactuated ship[J].IEEE Transactions on Control Systems Technology,2003,11(1):52-61.
[4]Jiang Z P.Global tracking control of underactuated ships by Lyapunov's direct method[J].Automatica,2002,38(2):301-309.
[5]Dong Wenjie,Guo Yi.Nonlinear tracking control of underactuated surface vessel[C]//American Control Conference.Portland,USA:[s.n.],2005:4351-4356.
[6]Ghommam J,Mnif F,Derbel N.Global stabilization and tracking control of underactuated surface vessels[J].IET Control Theory and Applications,2010,4:71-88.
[7]孟威,郭晨,孫富春,等.欠驅動水面船舶的非線性滑模軌跡跟蹤控制[J].哈爾濱工程大學學報,2012,33(5):1-5.
[8]朱齊丹,于瑞亭,劉志林.欠驅動船舶全局K指數航跡跟蹤的級聯反步法[J].船舶工程,2012,34(1):47-51.
[9]Ashrafiuon H,Muske K,McNinch L,et al.Sliding mode tracking control of surface vessels[J].IEEE Transactions on Industrial Electronics,2008,55(11):4004-4012.
[10]廖煜雷,莊佳園,李曄,等.欠驅動無人艇軌跡跟蹤的滑模控制方法[J].應用科技學報,2011,29(4):428-434.
[11]Fossen T I.Guidance and control of ocean vehicles[M]. New York:Wiley,1994.
[12]Khalil H K.Nonlinear systems[M].3rd ed.New Jersey,USA:Prentice-Hall,2002.
WANG Yan,ZHU Qidan,LIU Zhilin,YANG Zhen
College of Automation,Harbin Engineering University,Harbin 150001,China
In order to realize tracking arbitrary specified trajectory,a motion planning method is presented.All the desired attitudes are obtained by combining cubic spline interpolation,ship dynamic model,and discrete expected dots.Meanwhile,in order to realize fast tracking trajectory of underactuated surface vessels,global exponential tracking control law is proposed.Trajectory tracking error dynamic equation consists of two cascade subsystems based on diffeomorphism transformation.Then global exponential tracking control law is designed by using backstepping for error subsystems.The results of simulation experiments indicate that the proposed controller can effectively track arbitrary specified curve trajectory.
underactuated surface vessel;motion planning;tracking control;backstepping;exponential stabilization
針對目前欠驅動船舶航跡跟蹤控制難以實現跟蹤任意可行航跡問題,提出一種運動規劃方法。利用多項式擬合,并結合船舶動力學模型,通過離散期望點規劃出操作性可實現的全部期望姿態。同時,為實現欠驅動船舶的航跡快速跟蹤控制,提出一種全局指數航跡跟蹤控制律。引入微分同胚變換,建立兩個級聯的子系統構成的航跡跟蹤誤差動態方程;基于反步法的設計原理,運用Lyapunov直接方法對變換后的誤差系統設計了全局指數航跡跟蹤控制律。仿真結果驗證了所提出的全局指數航跡跟蹤控制律能夠有效實現跟蹤任意可行航跡。
欠驅動船舶;運動規劃;跟蹤控制;反步;指數穩定
A
U664
10.3778/j.issn.1002-8331.1209-0043
WANG Yan,ZHU Qidan,LIU Zhilin,et al.Motion planning and global exponential trajectory tracing of underactuated surface vessels.Computer Engineering and Applications,2013,49(5):18-22.
國家自然科學基金(No.50909026);黑龍江省自然科學基金(No.F200916);中央高校基本業務專項資金(No.HEUCFR1116)。
王巖(1984—),男,博士研究生,主要研究方向為智能控制理論與應用、船舶控制;朱齊丹(1965—),男,工學博士,教授,博士生導師,主要研究方向為機器人控制、智能控制等;劉志林(1977—),男,工學博士,講師,主要研究方向為混雜系統、預測控制、船舶控制;楊震(1984—),女,博士研究生,主要研究方向為船舶運動姿態預報、智能優化理論與方法。E-mail:wangyan0406@hrbeu.edu.cn
2012-09-10
2012-10-26
1002-8331(2013)05-0018-05
CNKI出版日期:2012-11-06 http://www.cnki.net/kcms/detail/11.2127.TP.20121106.1628.005.html
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國船檢(2017年3期)2017-05-18 11:33:09
