基于MFFK和Mean-Shift的紅外船舶目標跟蹤算法研究
2013-08-24 00:43:40徐曉波李衛斌
計算機工程與應用 2013年5期
徐曉波 ,李衛斌 ,2
1.西安科技大學 電氣與控制工程學院,西安 710054
2.咸陽師范學院 信息工程學院,陜西 咸陽 712000
紅外成像系統與雷達相比,具有結構簡單、體積小、重量輕、分辨率高、隱蔽性好、抗干擾能力強等優點;與可見光成像系統相比,有透過煙塵能力強,可晝夜工作等特點。紅外熱像儀受環境影響小,其紅外成像具有直觀、抗干擾能力強、氣候環境適應性強、全天候晝夜連續被動探測、測角精度高等優點,通過圖像處理算法能獲得更加準確的目標信息,既具有實時性,又具有穩定有效性,適合復雜內河船舶目標的跟蹤。
目前,基于紅外圖像的運動船舶目標跟蹤算法的研究主要有:裴繼紅[1-2]等對前視紅外成像目標的實時識別與跟蹤技術進行了研究,提出了三類識別特征(位置特征、形狀特征、輻射特征)及這三類特征的六個模糊隸屬度函數,采用模糊綜合評判技術對分割區域進行目標識別。劉松濤等[3]研究了艦船紅外成像目標的智能跟蹤技術,通過對成像階段和跟蹤算法的分析,提出了一種新的復合跟蹤算法,對MAD跟蹤算法和形心跟蹤算法作了進一步改進,依據高亮點數實現跟蹤算法之間的切換。許開宇[4]提出了基于BP網絡修正的卡爾曼濾波單目標跟蹤算法。對于內河復雜背景下的運動船舶目標,上述基于紅外圖像的運動船舶目標檢測和跟蹤算法,僅僅只有在目標較近,且信噪比很高的情況下才能得以使用,在很多復雜內河背景下不能被使用。
本文采用基于MFFK分形特征與Mean-Shift方法相結合的紅外船舶目標檢測跟蹤算法,該算法適用于內河背景,適應性強,檢測精度高。對處于各種內河復雜背景中的運動船舶目標可實現實時、可靠的檢測與跟蹤。
1 基于多尺度分形特征MFFK目標檢測
本文采用的是基于地毯覆蓋法[5-6]的一種新的多尺度分形特征參數MFFK[7](Multi-scale Fractal Feature related with K)。關于MFFK的計算如下:
對于二維圖像,其滿足如下性質:

其中,ε表示尺度,ε=0,1,…,εmax;A(ε)表示在尺度 ε下的圖像灰度表面的表面積測度;F D(Fractal Dimension)表示分形維數;K為拓撲維數D(這里D=2)維下的面積。
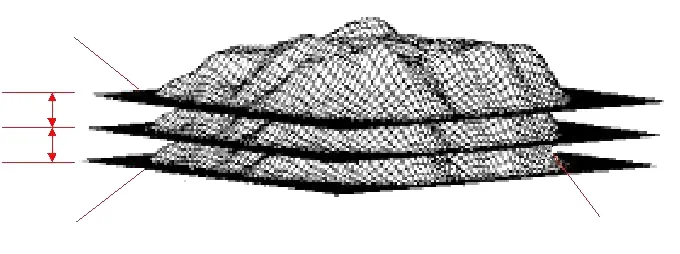
圖1 地毯覆蓋法示意圖
在地毯覆蓋法中,圖像 f(x,y)被視為三維歐式空間中的一個表面,用像素灰度值代表空間深度構成一個3維的數字的紋理表面。若以該表面中的某一個點為中心,考慮與中心點距離超過ε的像素點的集合,用一個厚度為2ε的“地毯”進行覆蓋,則表面的面積可由地毯上表面u(x,y,ε)、下表面b(x,y,ε)間的體積V(x,y,ε)除以2ε得到:

當度量尺度分別為 ε1=ε,ε2=ε-1,對公式(1)兩端取對數,再代入度量尺度,由于K為理想狀態2維下的面積參數(為一常數),在實際計算中,K不是一個常數。用K*來表示F D維下的關于ε的面積函數:

為了突出自然景物和人造目標的F D維面積K*隨尺度變化的差異,定義分形參數變化度量函數——與F D維面積K*相關的多尺度分形MFFK特征為:

其中εmax是實際計算分形參數時所取的最大尺度,εmax∈N,εmax≥2。MFFK可以理解為在 εmax的尺度范圍內 F D維面積K*的變化程度(人造目標像素的MFFK參數值比自然環境像素的MFFK參數值普遍要大),MFFK是一個新的多尺度分形特征,用于實現突出人造目標與自然背景在分形特征上的差異。
基于多尺度分形特征MFFK的船舶目標檢測算法流程圖如圖2所示。
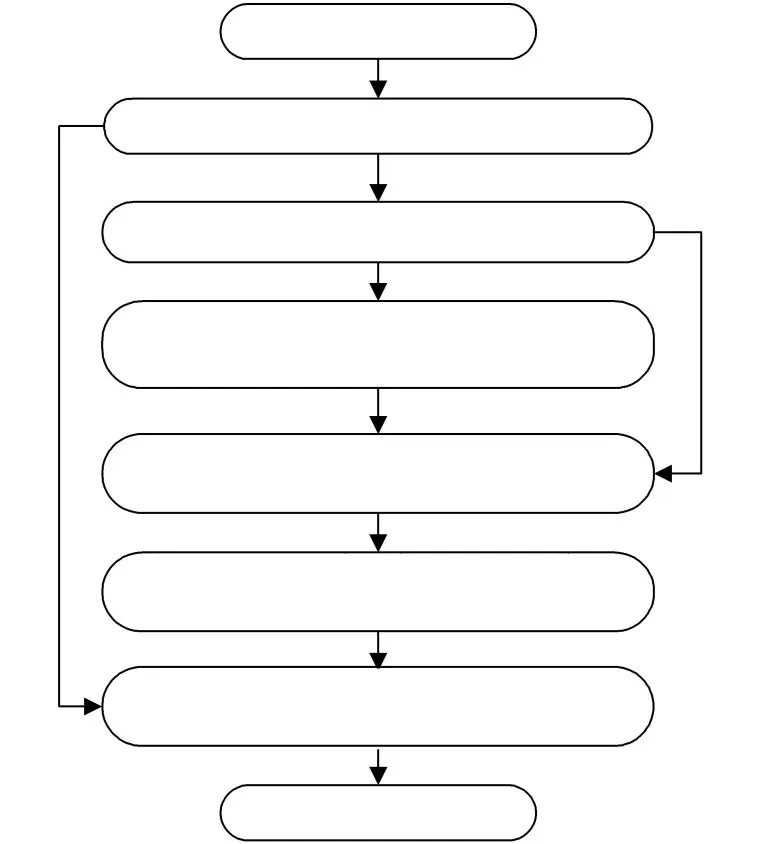
圖2 基于MFFK特征的船舶目標檢測算法
由于MFFK特征在灰度圖像中提供了足夠的信息來分辨內河船舶目標和自然背景,因此,只需要使用無需提供參數的OSTU(計算出一連通區域的閾值,然后對該區域二值化)圖像分割方法,直接根據MFFK特征參數進行圖像分割,其中灰度值為255附近的像素就表示了內河船舶目標。最后,把分割結果圖像映射到原始圖像中,即可獲得最終的檢測結果圖像。對于檢測結果圖像中可能存在的極少的假船舶目標,可以利用內河船舶目標的先驗知識,或船舶目標跟蹤算法進行確認,并最終去除假目標。這樣,就實現了從紅外圖像中進行內河船舶目標的檢測。
2 Mean-Shift跟蹤算法
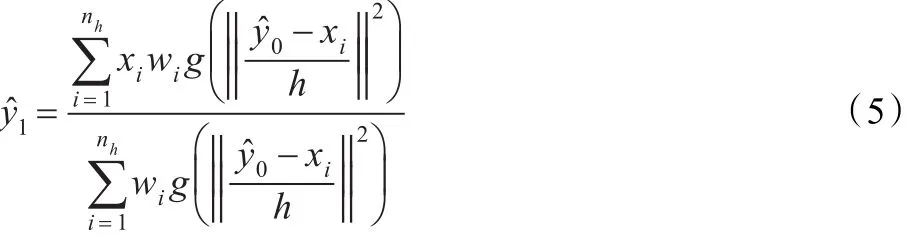
Mean-Shift目標跟蹤算法[8]主要利用目標的灰度和紋理特征的統計分布描述目標,并通過均值移位向量的梯度下降搜索達到目標跟蹤。其跟蹤過程首先是對目標模型的描述,以一定間隔的灰度值為單位,將取值為像素灰度值的特征空間分為多個特征值。那么在初始幀,包含目標的搜索窗口中,得出第u個特征值的概率。然后建立候選模型,運動目標在第二幀及以后的每幀中可能包含目標的區域稱為候選區域,其中心坐標為y,也是核函數的中心坐標。該區域中的像素用x表示。對候選區域的描述稱為目標候選模型,求出候選模型的特征值u=1,2,…,m的概率密度,計算出相似性函數。在當前幀中,以前一幀搜索窗口的位置作為當前幀搜索窗口的位置,設窗口中心為y0,在 y0鄰域內尋找局部最優目標位置 y1(相似度最大)。
其中實現跟蹤算法的步驟如下:
(2)確定候選內河船舶目標的新位置。
閾值 ε的選取應使得 y?1和 y?0的距離小于1個像素間距。如果ε取得更小,可以取得亞像素級的精確度。為了滿足實時跟蹤的要求,限制整個迭代過程執行的次數在2次以內,實際執行跟蹤過程中平均的迭代次數一般為3次就可以滿足停止條件。
實際執行算法時,只需迭代地計算步驟(2)中的權值wi;步驟(3)中新的目標位置和檢驗校核函數移動的步長。僅需在算法迭代結束后,才計算參考內河船舶目標和候選內河船舶目標之間的Bhattacharyya系數。
另外,在本文中,核函數選為Epanechnikov核函數,并選擇如下式所示的Epanechnikov剖面函數時:


3 實驗仿真結果
與分形維數F D、D維面積K、分形模型擬合誤差F M F E、與F D相關的多尺度分析參數M F F D,進行船舶目標檢測性能仿真實驗比較。重疊區域ROO(Region Of Overlap)ROO的數值表示了自動分割結果圖像和理想的分割結果圖像之間的吻合程度,當ROO的值越大,表明兩個分割結果圖像越接近,相應檢測算法的檢測精度越高。
實驗表明:在參與比較5個分形參數中,在內河復雜背景紅外圖像中,MFFK具有最好的船舶檢測精度,該參數提供了最優的內河船舶目標和內河自然背景分辨能力。
原始的Mean-Shift方法與本文提出的新的Mean-Shift方法的船舶目標跟蹤實驗仿真結果對比如圖4。
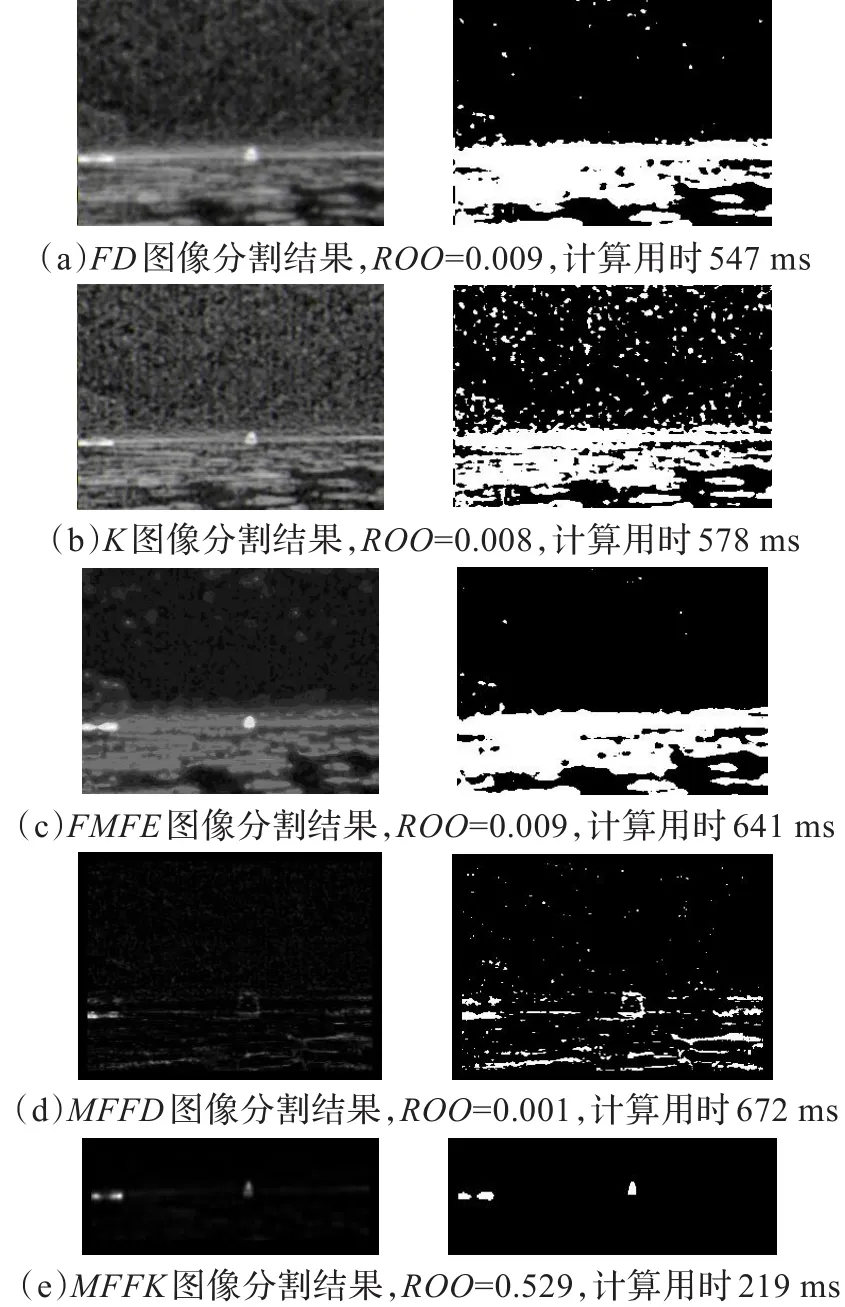
圖3 5種分形特征的實驗對比圖
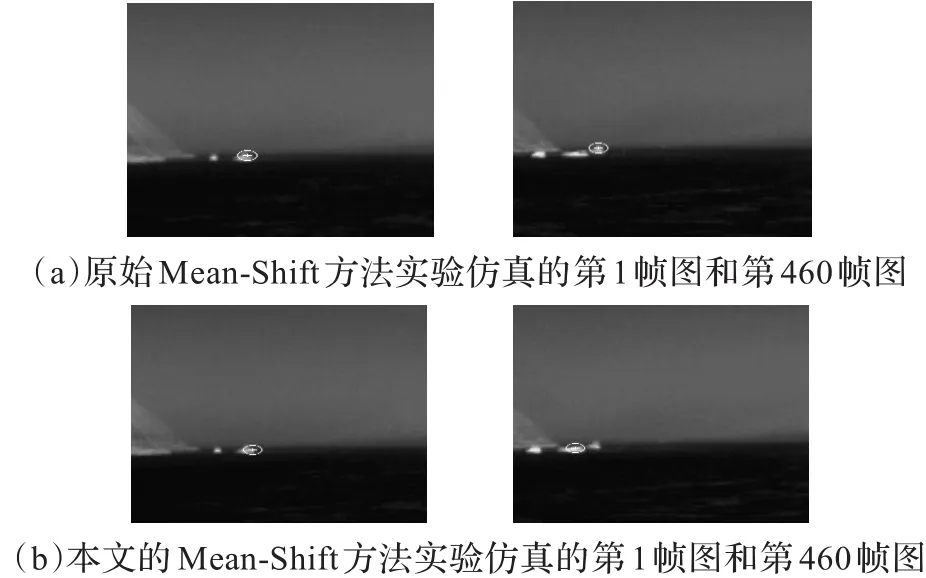
圖4 兩種Mean Shift的實驗對比圖
原始算法處理速度為13 f/s,間隔5幀進行跟蹤的實驗結果,圖4(a)顯示第1幀的跟蹤結果正確,第460幀的跟蹤結果出現偏差,跟蹤定位失敗;當使用新的算法時,處理速度為7 f/s,同樣間隔5幀進行跟蹤,圖4(d)中顯示第1、460幀及其所有中間幀均實現了正確的跟蹤。
結果表明:該方法明顯優于傳統的Mean Shift算法;在相對簡單的內河背景中,該算法能夠應付場景的各種變化,同時能有效地避免相似內河船舶目標靠近正在跟蹤的目標或者和正在跟蹤的目標交錯引起的情況。
4 結論
本文采用基于MFFK分形特征與Mean-Shift方法相結合的紅外船舶目標檢測跟蹤算法,該算法適用于內河背景,因算法簡潔、實時性好、能夠處理目標變形、部分遮擋等困難情形,具有極大的實用價值,是視覺目標跟蹤領域的研究熱點之一。目前大量的研究集中于進一步改善算法對目標變形、旋轉等方面的處理性能,及使用更精細的模型以便跟蹤更多的運動狀態[10]。
[1]裴繼紅,謝維信,劉上乾.艦船紅外成像目標實時識別跟蹤算法研究[J].光電工程,1995,22(5):21-31.
[2]劉松濤.艦船紅外成像目標智能跟蹤算法研究與實現[J].激光與紅外,2005,35(3):193-195.
[3]劉松濤.艦船紅外成像目標實時識別與跟蹤系統研究[J].系統工程與電子技術,2005,27(8):1405-1408.
[4]許開宇.基于紅外圖像的運動船舶檢測及跟蹤技術的研究[D].上海:上海海事大學,2006.
[5]魏穎.一種基于多尺度分形新特征的目標檢測方法[J].東北大學學報:自然科學版,2005,26(11):1062-1066.
[6]Peli T.Multiscale fractal theory and object characterization[J].J Opt Soc Am A,1990,7(6):1101-1112.
[7]劉俊.基于紅外圖像的內河運動船舶目標檢測和跟蹤技術研究[D].重慶:重慶大學,2008.
[8]朱勝利.快速運動目標的Mean Shift跟蹤算法[J].光電工程,2006,33(5).
[9]Comanicin D,Ramesh V,Meer P.Real-time tracking of nonrigid objects using mean shift[C]//Proc of the IEEE Conference on Computer Vision and Pattern Recognition.Hilton Head Island,USA:[s.n.],2000,2:142-149.
[10]齊飛,羅予頻,胡東成.基于均值漂移的視覺目標跟蹤方法綜述[J].計算機工程,2007,33(21):24-27.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
海峽科技與產業(2016年3期)2016-05-17 04:32:12
