基于C8051F045單片機的輪速測量電路設計
2013-07-09 02:33:42賴文娟雷雨能
兵器裝備工程學報 2013年3期
賴文娟,曾 刊,雷雨能
(中國兵器工業第五八研究所 軍品部,四川 綿陽 621000)
工程實踐中輪速測量普遍采用以單片機為核心的數字測量方式,本設計則由C8051F045 為核心主控芯片,通過其自帶的CAN 總線接口實現輪速信號與上位機的通信。CAN總線是1 種多主方式的串行通信總線,使用CAN 總線接口通信具有可靠的檢錯和錯誤處理機制、較高的位速率及抗電磁干擾能力。本設計的這種基于CAN 總線的輪速信號測量電路具有工作可靠、抗干擾性強等優點。
由于磁電式傳感器工作穩定可靠,幾乎不受溫度、灰塵等環境因素的影響,因此本設計中的輪速傳感器選用磁敏式SDI-H 型磁敏測速傳感器。選用的SDI-H 型磁敏傳感器具有編碼器功能,頻響寬,穩定性好,抗干擾強,可實現遠距離傳輸,其位置型測速有保持功能,可從0 轉速開始,并內置放大整形電路,輸出為2 路有相位差的幅度穩定的脈沖方波信號,測速的同時還可判定車行方向。
該輪速測量電路作為無人車環境感知分系統的1 個組成部分,測量得出的輪速信息可為路徑規劃中更好地避障及自動駕駛控制性能的優化提供重要的數據參數。
1 系統工作原理
1.1 輪速信號測量原理
輪速信號測量利用輪速傳感器輸出脈沖頻率和轉速成正比的原理設計,采用測頻法進行輪速測量的計時。根據輪速傳感器脈沖發生器產生的2 路脈沖信號的相位差判定車輪轉動方向,根據單片機定時器檢測在一定時間內脈沖發生器產生的脈沖數來測量輪速。
1.2 脈沖信號產生原理
本設計采用磁敏式傳感器進行非接觸式檢測。磁敏式傳感器由磁頭和磁感應線圈組成,磁頭固定在磁極支架上,支架固定在長軸上,磁感應線圈通過輪轂、制動轂連為一體,長軸穿過車輪與內部的軸承配合,輪轂帶動車輪轉動。磁頭與磁感應線圈的作用距離為0 ~2 mm,磁敏式傳感器的磁感應線圈內鑲嵌n 個N/S 極性條形磁鐵,每個內置的N/S 極性條形磁鐵交替與磁頭接近、離開,使傳感器輸出信號端產生周期性開關電平,從而形成脈沖信號。每當車輪轉動1 圈,磁敏式傳感器產生n 個脈沖,輸出脈沖經信號處理電路送單片機計數后就可計算得出輪速。
1.3 輪速信號的檢測原理
將磁敏式傳感器輸出的方波信號送至C8051F045 單片機的外部,用T1 作定時器,T0 作計數器,將中斷INTO 引腳設定為邊沿觸發方式,計滿100 個脈沖數,觸發中斷,進入計數服務中斷程序。單片機對脈沖方波信號進行周期測量,經計算得到輪速。
考慮到車行方向為雙向,車輪既可順時針也可逆時針旋轉,單片機需對車輪轉向輸出的2 路脈沖方波信號A 和B 鑒向后才能計數。若車輪順時針旋轉時,SDI-H 型磁敏測速傳感器輸出的脈沖方波信號A 超前B 相位90°;則反之,若車輪逆時針旋轉,SDI-H 型磁敏測速傳感器輸出的脈沖方波信號A 將滯后B 相位90°。此鑒向通過單片機編程實現。
2 系統總體方案
如圖1 所示,輪速測量電路系統主要由輪速傳感器、信號處理電路、單片機、CAN 收發器和上位機組成。
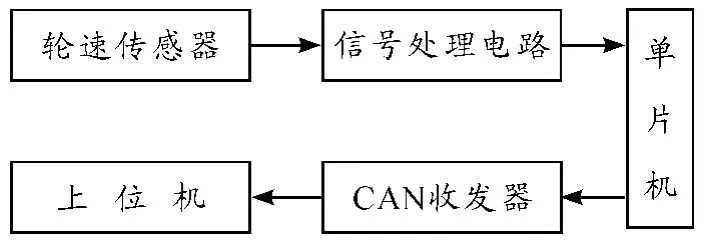
圖1 輪速測量電路系統總體框圖
輪速測量電路系統工作流程為:輪速傳感器輸出的2 路有相位差的信號CG00_12V、CG01_12V 經信號處理電路光電隔離、限幅降壓、反向后形成2 路脈沖方波信號CG00_3.3V和CG01_3.3V,送單片機C8051F045 的P0.0、P0.1。輪速信號的檢測通過將輪速傳感器輸出的2 路脈沖方波信號送至單片機的外部中斷引腳,將其設定為邊沿觸發方式,用單片機定時器對脈沖方波信號進行周期測量計數,得到輪速,通過CAN 總線接口送至 CAN 收發器。CAN 收發器SN65HVD230 與單片機CAN 總線接口組成控制接口電路,通過CAN 收發器將輸入信號轉化為差分信號輸出到CAN 總線上,輪速數值通過總線接口電路發送至上位機。
3 系統電路設計
3.1 單片機主控芯片電路
C8051F045 單片機是完全集成的混合信號片上系統型MCU,具有64 個數字I/O 引腳,片內集成了1 個CAN2.0B控制器,具有片內VDD 監視器、看門狗定時器和時鐘振蕩器,是真正能獨立工作的片上系統。C8051F045 單片機屬于51 系列單片機,其基本控制電路有復位電路和時鐘電路。本設計中單片機控制電路/RST 引腳采用上電復位,時鐘電路采用22.1184M 晶振Y1。單片機測量輪速時,單片機對由I/O引腳P0.0 和P0.1 輸入的2 路脈沖方波信號鑒向后再計算,此鑒向通過單片機編程實現。由單片機編程計算得出的輪速值通過CANTX 發送至CAN 收發器信號輸入端,由CAN收發器通過CAN 總線發送至上位機。單片機控制電路如圖2 所示。
3.2 信號處理電路
信號處理電路部分是整個測速系統的核心,信號處理電路將輪速傳感器產生的2 路脈沖信號通過限幅降壓和反相器調整成1 個可滿足單片機輸入脈沖的脈沖方波信號。由于SDI-H 型磁敏測速傳感器輸出的2 路脈沖信號CG00_12V 和CG01_12V 高電平在電源電壓11 ~12 V,低電平在0 V 左右,故該脈沖信號的電壓值不符合C8051F045 單片機接口要求,需利用TLP521 -1 限幅降壓隔離整形電路處理電壓信號,并通過74HC04 反相器將TLP521 -1 處理后的2 路降壓信號CG00_3.3V 和CG01_3.3V 反向,其脈沖信號輸出電壓高電平約為3.3 V,這樣經過信號處理電路處理后產生的2 路脈沖方波即可通過I/O 引腳P0.0 和P0.1 送至單片機計算。信號處理電路如圖3 所示。
3.3 CAN 收發器電路
如圖4 所示,將單片機CANTX 發送的輪速數值經LT712光電隔離后送至CAN 收發器SN65HVD230,將輪速數值轉化為差分信號CAN+和CAN -輸出到CAN 總線,由此輪速值通過CAN 總線接口發送至上位機。
4 結束語
系統電路以自帶CAN 總線接口的單片機C8051F045 為核心主控芯片,選用可鑒相的輸出為2 路脈沖方波信號的磁敏式傳感器SDI -H,將產生的2 路脈沖方波信號經信號處理電路光電隔離、限幅降壓反向后送單片機計數,通過單片機CAN 總線接口經CAN 收發器SN65HVD230 將輪速信息發送至上位機顯示。實際應用證明,本設計具有良好的測速穩定性,可在不增加硬件開支的前提下有效提高低速時的測量準確性,在輪速測量上有一定的應用價值。

圖2 單片機控制電路
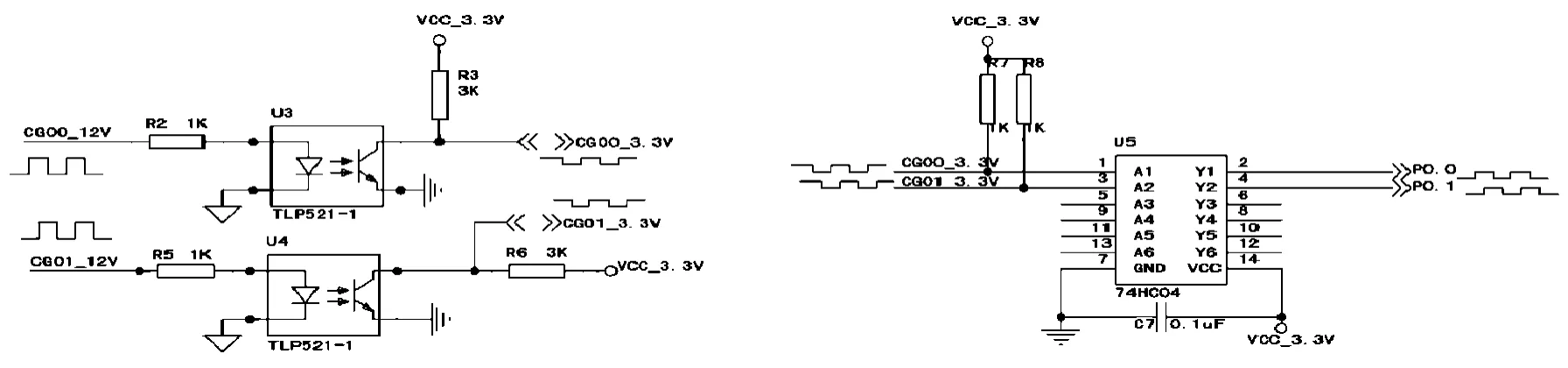
圖3 信號處理電路
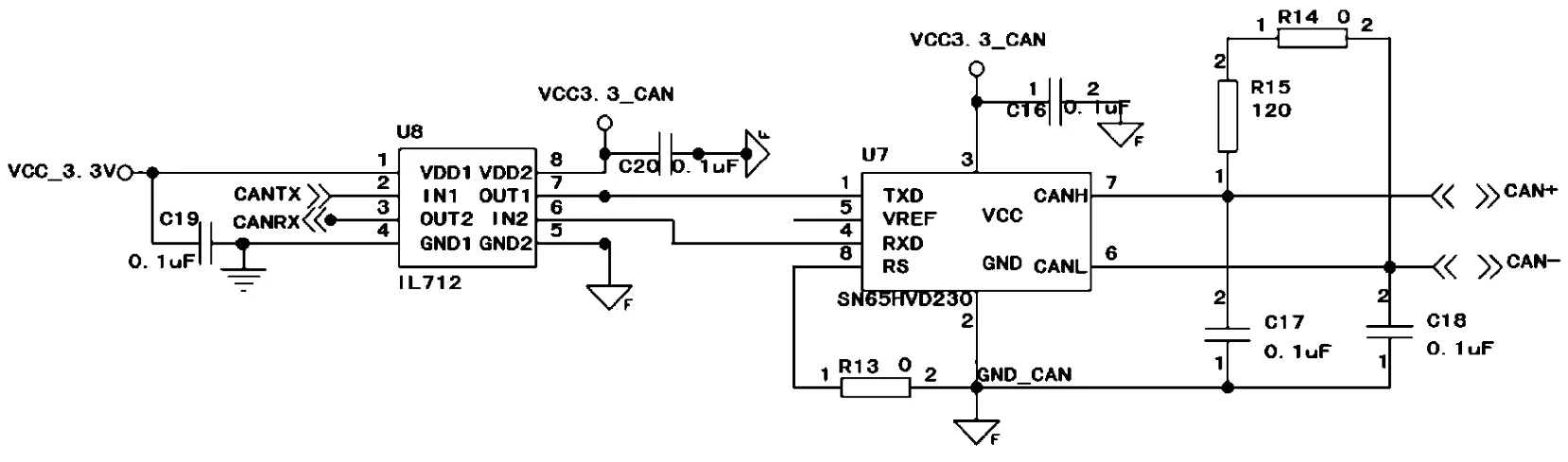
圖4 CAN 收發器電路
[1]王劃一,楊西俠.自動控制原理[M].2 版.北京:國防工業出版社出版社,2012.
[2]鮑可進.C8051F 單片機原理及應用[M].北京:中國電力出版社,2006.
[3]陶紅艷,余成波.傳感器與現代檢測技術[M].北京:清華大學出版社,2009.
[4]蔣云云,王擊.一種新型電機轉速測量方法的研究[J].電腦知識與技術,2009,5(19):5291-5292.
[5]丁陽喜,吳冀林.基于單片機測量電機轉速的系統設計[J].煤礦機械,2010,31(3):236-238.
[6]新華龍電子. C8051F04x 數據手冊[OL]. http: //www.xhl.com.cn,2007.?
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
