微型三軸一體化光纖陀螺研究
2013-07-09 02:33:40周昌學陳朝春卜繼軍帥師師牟炳富
兵器裝備工程學報 2013年3期
周昌學,陳朝春,卜繼軍,付 靜,帥師師,胡 興,牟炳富
(四川壓電與聲光技術研究所,重慶 400060)
光纖陀螺從1976 年提出到現(xiàn)在,已走過了從原理樣機到工程應用的多個階段。作為新一代光學速率傳感器,光纖陀螺相比于其他陀螺具有壽命長、抗振動沖擊性能好、動態(tài)范圍大、體積小、結構和加工工藝簡單、成本低等特點[1-3]。目前,國內從中低精度到0.001 °/h 的高精度陀螺均有報道,其應用范圍從軍用的航空航天、武器制導、戰(zhàn)車導航、衛(wèi)星姿態(tài)控制到民用的石油鉆井、軌道檢測、機器人控制、車輛導航等均有覆蓋。隨著光纖陀螺技術的日益成熟,其應用前景會更加廣闊。
目前光纖陀螺從結構上大體有單軸和三軸一體化之分。隨著光纖陀螺技術的不斷成熟、發(fā)展,三軸一體化光纖陀螺受到越來越多的關注[4]。通常在慣性導航或姿態(tài)控制應用中需要測量3 個方向的角速度信息,簡單的實現(xiàn)方案可采用3 套單軸光纖陀螺進行組合,但組合后其體積、功耗和成本通常難以達到系統(tǒng)的要求。基于慣性導航或控制系統(tǒng)的需要,從降低成本、簡化結構、節(jié)省空間和降低功耗等方面考慮,把3 個軸向正交陀螺的部分器件經過有效的整合,實現(xiàn)三軸陀螺的一體化設計可解決上述問題[5]。
1 微型三軸一體化光纖陀螺總體結構
單軸閉環(huán)光纖陀螺由SLD 光源、2 ×2 耦合器、Y 波導、光纖環(huán)和探測器構成。三軸一體化光纖陀螺儀的實現(xiàn)方案有很多種,比如共用光源方案[6]、時分復用方案、共用處理電路方案等[5,7],都可降低成本、簡化結構、節(jié)省空間、降低功耗。本文在對三軸光纖陀螺精度、體積、功耗進行分析的基礎上,將共用光源方案、時分復用方案、共用處理電路方案結合起來,設計了微型三軸一體化光纖陀螺。
微型三軸一體化光纖陀螺中3 個光纖陀螺光路共用1個光源和1 個探測器,而Y 波導和光纖環(huán)仍獨立使用,2 ×2耦合器變成3 ×3 耦合器,信號處理部分由3 個獨立部分合成1 個整體,三軸一體化光纖陀螺總體結構框圖見圖1。
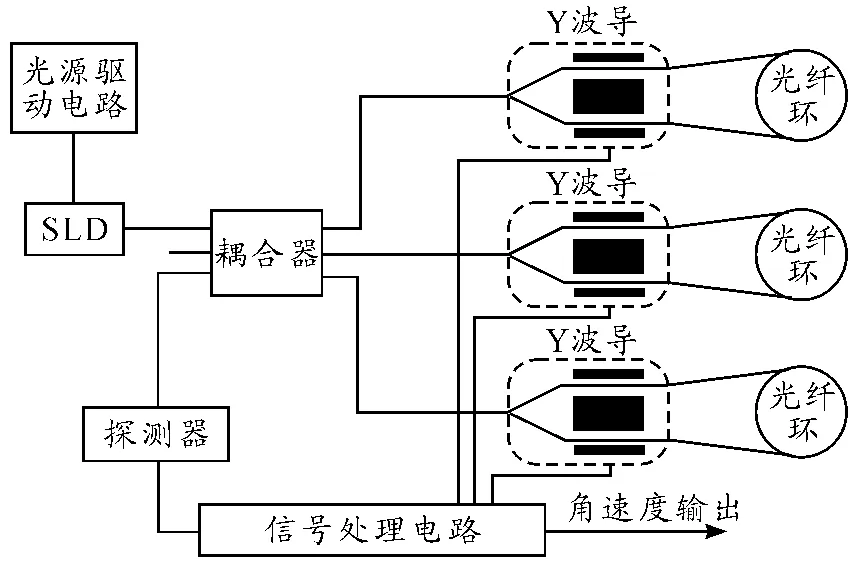
圖1 微型三軸一體化光纖陀螺總體結構
2 微型三軸一體化光纖陀螺設計
2.1 結構設計
微型三軸一體化光纖陀螺結構如圖2 所示。為減小光路體積并充分利用結構的空間提高光纖陀螺精度,在光纖環(huán)的設計上采用異形化(一般光纖環(huán)均為圓形)設計,將光纖環(huán)設計成橢圓形,這樣既能保證光纖環(huán)有足夠的有效面積和長度,又有利于其他光學器件的安裝。通過光纖環(huán)的異形化設計,大大降低了系統(tǒng)體積,在8 cm×8 cm×7 cm 尺寸下完成了三軸一體化光纖陀螺設計。同時設計上還預留了擴展空間,可用于安裝DC-DC 電源,以適應不同用戶對不同供電的要求。
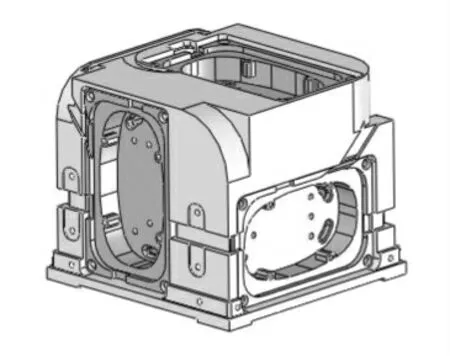
圖2 微型三軸一體化光纖陀螺結構設計
需要注意的是,橢圓形光纖環(huán)對光纖繞環(huán)工藝提出了更高的要求,需要在4 極對稱繞環(huán)精度和繞環(huán)張力變化上進行更進一步的控制,同時在涂膠工藝上也需要優(yōu)化。
2.2 信號處理設計
三軸一體化光纖陀螺信號處理部分采用3 軸共用1 套信號檢測與處理電路的方法。其與單軸光纖陀螺一樣由前置放大電路、A/D 轉換電路、數(shù)字信號處理電路、D/A 轉換電路等組成,完成光干涉信號的采集、處理和傳輸。處理器(FPGA)通過時序控制完成3 軸角速度信號在1 套信號檢測與處理電路上的分時檢測與輸出。
三軸一體化光纖陀螺時分復用的原理是給1 軸光路加調制信號時,另2 軸不加調制處于非工作狀態(tài),實現(xiàn)3 個陀螺交替工作。加調制的信號頻率高,未加調制的信號變化緩慢,根據(jù)頻率的不同可以區(qū)分混在一起的信號和“噪聲”。即系統(tǒng)在對x 軸施加調制信號使其處于閉環(huán)工作狀態(tài)并輸出角速度信息時,y 軸和z 軸不加調制并處于開環(huán)非工作狀態(tài)。其工作時序如圖3 所示,按照一定的時間間隔,x、y、z 軸輪流處于工作狀態(tài)。
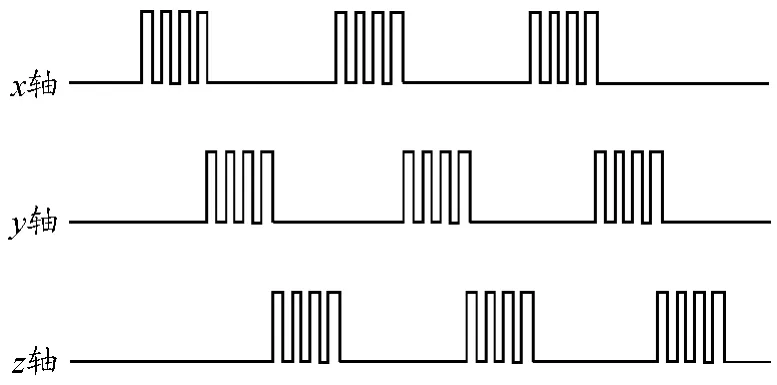
圖3 三軸一體化光纖陀螺工作時序
系統(tǒng)采用單個D/A 電路完成3 路信號的閉環(huán)反饋,對三軸陀螺施加的反饋信號通過1 個控制開關進行通道切換,電路原理如圖4 所示。將D/A 輸出調制信號輸送至放大電路,經放大后作為反饋信號,控制信號根據(jù)時序信號選擇合適的通道將反饋信號加載到相應陀螺的相位調制器上,完成閉環(huán)控制。
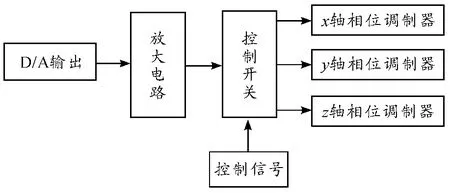
圖4 三軸一體化光纖陀螺時分控制
2.3 溫度補償技術
構成光纖陀螺的主要器件如SLD 光源、Y 波導、光纖環(huán)等對溫度比較敏感,為提高陀螺全溫精度,對其進行全溫誤差參數(shù)補償非常重要[8]。在大量試驗數(shù)據(jù)的基礎上,考慮工程實用性,建立了三軸光纖陀螺儀的全溫誤差模型:

式中:Nx,Ny,Nz為三軸陀螺輸出量;ωx,ωy,ωz為三軸陀螺輸入轉動角速度;E0x,E0y,E0z為三軸陀螺的標度因數(shù)溫度系數(shù)擬合常值項;kij(i=x,y,z;j=1,2)為三軸陀螺標度因數(shù)溫度系數(shù);Eyx,Ezx,Exy,Ezy,Exz,Eyz為三軸光纖陀螺的交叉耦合系數(shù);kij(i=x,y,z;j=x,y,z)為三軸陀螺交叉耦合系數(shù)的溫度系數(shù);D0x,D0y,D0z為三軸陀螺的零偏溫度系數(shù)擬合常值項;kij(i=x,y,z;j=3,4)為三軸向陀螺零偏溫度系數(shù)。
3 微型三軸一體化光纖陀螺性能
研制出的微型三軸一體化光纖陀螺照片如圖5 所示。

圖5 微型三軸光纖陀螺照片
微型三軸一體化光纖陀螺樣機研制完成后,進行了一系列的常規(guī)測試。實測的三軸光纖陀螺主要指標為:零偏穩(wěn)定性均小于2°/h,零偏重復性均小于2°/h。此外,還完成了高低溫工作、溫度循環(huán)、振動與沖擊等試驗,滿足設計要求。目前,三軸一體化光纖陀螺儀已經成功應用到了某系統(tǒng)中。
4 結束語
微型三軸一體化光纖陀螺采用光源、探測器和信號處理電路共用方案,在結構設計上采用橢圓化光纖環(huán),在信號處理上采用時分復用的方法。研制出的三軸光纖陀螺體積小于8 cm×8 cm ×7cm,零偏穩(wěn)定性小于2°/h,零偏重復性小于2°/h,陀螺溫度性能較好,具有較強的抗振動沖擊能力。
[1]張桂才. 光纖陀螺原理與技術[M]. 國防工業(yè)出版社,2008.
[2]Lefevre H C.The Fiber-Optic Gyroscope[M].London:ARTECH HPUSE,1993.
[3]石國祥,陳堅,葉軍,等.光纖陀螺溫度影響的非線性綜合誤差補償[J].四川兵工學報,2011,32(3):76-78.
[4]金靖,宋凝芳,李敏,等.衛(wèi)星用光纖陀螺三軸組合的關鍵技術[J].北京航空航天大學學報,2006,32(11):1386-1389.
[5]盛鐘延,周柯江,葉煒.光纖陀螺(FOG)小型化技術[J].激光與紅外,2002,30(1):53-55.
[6]劉會文,朱杰,李佳程. 三軸一體化光纖陀螺技術[J].中國慣性技術學報,2007,15(5):612-614.
[7]魯軍,劉軍,王立冬.一種三軸光纖陀螺時分復用方案的設計與分析[J]. 中國慣性技術學報,2009,17(5):586-588.
[8]吉世濤,秦永元,藍燕. 光纖陀螺輸入軸失準角溫度補償研究[J]. 測控技術,2010,29(10):6-8.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
