Petri網(wǎng)在某型艦炮防御過程中的應(yīng)用
2013-07-03 06:06:44張志瑞
兵器裝備工程學(xué)報 2013年6期
關(guān)鍵詞:模型
王 鼎,張志瑞,鄭 剛
(海軍駐包頭地區(qū)軍代室,包頭 014030)
隨著現(xiàn)代軍事技術(shù)的發(fā)展,水面艦艇在作戰(zhàn)過程中面臨來自水面、空中和水下的各種威脅,幾乎是全方位、全立體的,主要包括各種導(dǎo)彈、艦炮、魚雷的攻擊,所以防御是一個很復(fù)雜的攻防對抗過程,其間涉及的可變因素很多,艦艇如何進行科學(xué)有效的防御,保持戰(zhàn)斗力也就成了一個需要解決的問題。艦炮是艦艇上的主要武器,某型艦炮是一種能夠在其艦炮武器系統(tǒng)的指揮控制下,完成對空、對海和對陸上目標進行射擊的高射速全自動火炮,該炮具有全自動操作、發(fā)射率高、精度高、重量輕、瞄準速度和瞄準加速度高、可更換3種彈型并進行發(fā)射等優(yōu)點。某型艦炮的防御是一個離散事件過程,且事件的發(fā)生具有并行、異步和隨機等特點。
Petri 網(wǎng)是一種可應(yīng)用到許多系統(tǒng)和領(lǐng)域的圖形和數(shù)學(xué)分析工具,它能夠描述和分析具有并行、不確定性、異步和分布式特點的系統(tǒng)。Petri 網(wǎng)不但具有類似流程圖的可視化描述能力,還可以通過標記在網(wǎng)內(nèi)的流動揭示系統(tǒng)動態(tài)行為,這是一般的工具所不具有的功能。目前,國際上對Petri 網(wǎng)理論和應(yīng)用的研究方興未艾,出現(xiàn)了許多改進的Petri 網(wǎng)模型,如隨機Petri 網(wǎng)、謂詞Petri 網(wǎng)、顏色Petri 網(wǎng)等,從而大大拓寬了Petri 的應(yīng)用范圍和描述能力。
本文對Petri 網(wǎng)用于某型艦炮的防御過程作了初步研究,提出了防御過程的Petri 網(wǎng)表示方法并對該Petri 網(wǎng)做出了相應(yīng)的說明和仿真,最后對該炮射擊的決策過程做了定量的描述。
1 某型艦炮的防御流程
一般情況下,某型艦炮防御的作戰(zhàn)過程大致可以分為偵測識別、跟蹤解算和射擊攔截3 個階段[1],整個作戰(zhàn)流程如圖1 所示。
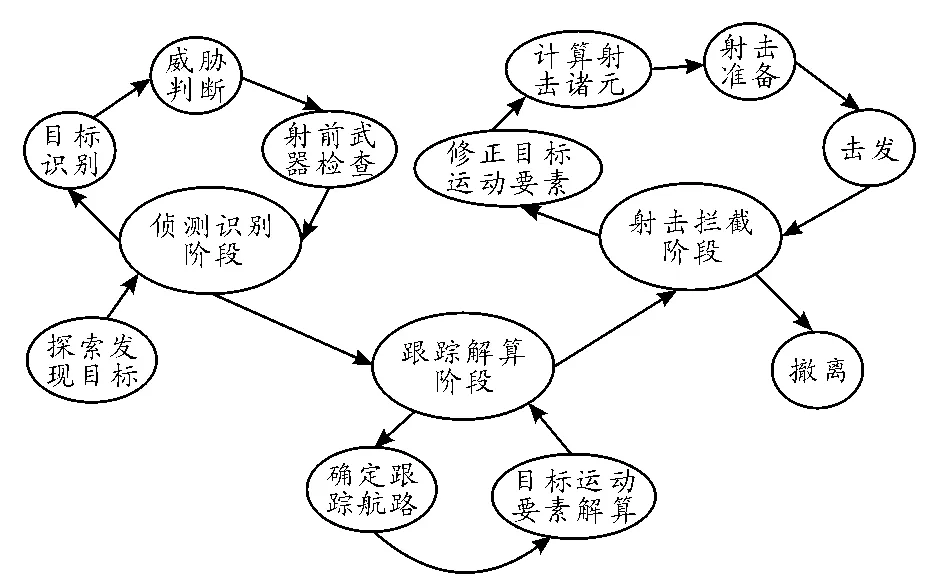
圖1 艦炮防御流程
偵測識別階段需要完成目標偵察、搜索,目標跟蹤與識別,目標威脅判斷及攻防決策,武器射前檢查及射擊準備;跟蹤解算階段要繼續(xù)完成確定跟蹤解算航路并實施接敵跟蹤,解算目標運動要素;射擊攔截階段的主要工作包括精確解算目標運動要素,計算武器射擊諸元,完成射擊準備及瞄準射擊。武器射擊結(jié)束后,需要根據(jù)射擊效果,如擊中目標或沒有命中目標確定下一步的戰(zhàn)術(shù)行動。
2 Petri 網(wǎng)模型定義
本文所說的Petri 網(wǎng),嚴格意義上說是庫所容量為無窮的庫所∕變遷網(wǎng)系統(tǒng)(P ∕T 系統(tǒng)),這里只給出幾個主要概念的定義,其他概念與性質(zhì)參閱文獻[2-3]。
定義1 Petri 網(wǎng)是一個六元組∑=(S,T;F,K,W,M),當(dāng)且僅當(dāng):①S∪T≠?;②S∩T=?;③F?(S×T)∪(T×S);④dom(F)∪cod(F)=S∪T;其中:dom(F)={s∈S∪T|?t∈S∪T:(s,t)∈F};cod(F)={s∈S∪T|?t∈S∪T:(t,s)∈F};⑤K:S→N+∪{∞};⑥W:F→N+;⑦M:S→N,滿足:?s∈S:M(s)≤K(s)。其中S 元素是庫所(place),T 元素是變遷(transition),F(xiàn) 元素是流關(guān)系(flow relation),K 是庫所容量函數(shù)(capacity function),W 是弧權(quán)函數(shù)(weighted function),M 是標識(marking),N+={1,2,3,…},N ={0,1,2,…}。
以上定義說明Petri 網(wǎng)是由庫所、變遷及它們之間的流關(guān)系所構(gòu)成的一個動態(tài)網(wǎng),通過引入變遷發(fā)生規(guī)則(transition firing rule)的定義,可以使得標記(token)在網(wǎng)中流動,Petri 網(wǎng)的標識不斷更新,從而描述系統(tǒng)的動態(tài)過程。
定義2 變遷發(fā)生規(guī)則[1]:令∑=(S,T;F,K,W,M)是一個Petri 網(wǎng),則:
1)對于變遷t∈T,變遷t 在標識M 有發(fā)生權(quán)(enabled,記為M[t >)的條件為

2)若M[t >,則在標識M 下,變遷t 可以發(fā)生(fire),從標識M 發(fā)生變遷t 得到一個新的標識M'(記為M[t >M'),則對?s∈S,

其中·t={s|s∈S∪T∧(s,t)∈F},t·={s|s∈S∪T∧(t,s)∈F}分別稱為t(t∈T)的前集和后集。
3 艦炮防御過程的Petri 網(wǎng)描述
3.1 艦炮防御過程的Petri 網(wǎng)模型
圖2 是艦炮防御過程的Petri 網(wǎng)模型,每個庫所表示所處的作戰(zhàn)狀態(tài),每個變遷表示作戰(zhàn)狀態(tài)的轉(zhuǎn)換,它們都和一定的戰(zhàn)術(shù)規(guī)則相關(guān)聯(lián)(見表1 和表2)。

圖2 艦炮防御過程的Petri 網(wǎng)模型
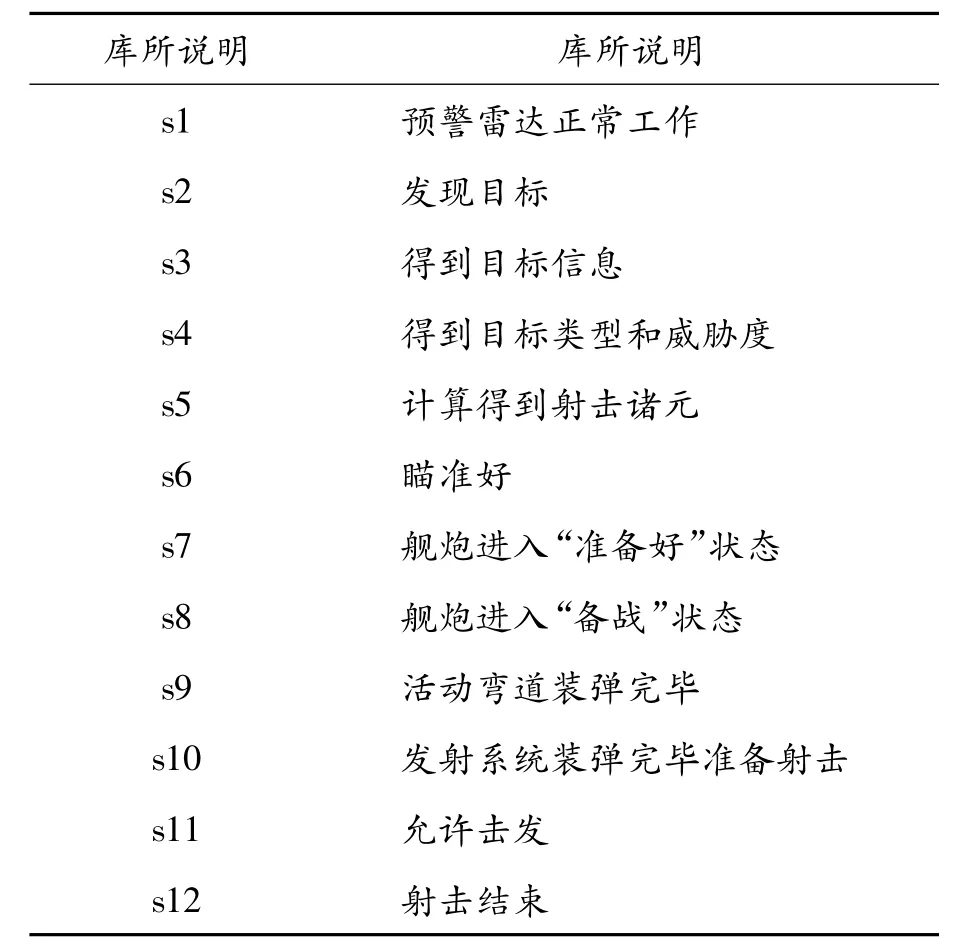
表1 Petri 網(wǎng)庫所元素說明
3.2 艦炮防御過程的Petri 網(wǎng)說明
某型艦炮主要有4 種狀態(tài):“平時”狀態(tài)、“準備好”狀態(tài)、“備戰(zhàn)”狀態(tài)和“維修”狀態(tài)。s7 就表示該艦炮處于“準備好”的狀態(tài),當(dāng)預(yù)警雷達發(fā)現(xiàn)目標后馬上進行總體啟動,使其進入“備戰(zhàn)”狀態(tài),與此同時跟蹤雷達開始工作對發(fā)現(xiàn)的目標進行跟蹤,相應(yīng)的機構(gòu)也對目標進行威脅判斷。艦炮進入“備戰(zhàn)”狀態(tài)后向活動彎道供彈,到達s9,跟蹤雷達也把相應(yīng)的目標信息傳給火控計算機,由其解算射擊諸元,到達s5,與此同時也可通過火控計算機得到的目標信息進行威脅判斷,所以通過變遷t4 可到達庫所s4。活動彎道有彈后,結(jié)合威脅判斷的結(jié)果做出決策如何對發(fā)射系統(tǒng)進行裝彈,裝彈完畢進入“準備射擊”狀態(tài)s10。火控計算機也要把射擊諸元傳給炮瞄雷達進行瞄準,當(dāng)接收到“瞄準好”和“擊發(fā)允許”后才能進行射擊。射擊結(jié)束后給代表“擊發(fā)允許”的庫所s11一個標志以保證它在整個射擊過程中都有標志。若未擊中目標則通過變遷t10 返回到目標信息的狀態(tài)s3 進行校射后再次擊發(fā),同時射擊結(jié)束后在馬達的帶動下活動彎道也供彈完畢,所以賦予s9 一個標志;若擊中目標則通過變遷t11 返回到初始狀態(tài)再次進行搜索目標。

表2 Petri 網(wǎng)同戰(zhàn)術(shù)規(guī)則相關(guān)聯(lián)的變遷說明
3.3 擊發(fā)命令決策過程的定量描述
在上述所建立的Petri 網(wǎng)中變遷t8 是用一個無色的矩形表示的,不同于其他變遷,這是因為該艦炮在發(fā)射系統(tǒng)裝彈過程中能夠隨意更換Ⅰ型、Ⅱ型、Ⅲ型這3 種彈型的炮彈并進行射擊(其中Ⅰ型為常規(guī)彈,Ⅱ型和Ⅲ型為特種彈),在射速方面有高、中、低3 種選擇,如果所選的是特種彈還可以選擇點射和連射,連射的發(fā)數(shù)又分為了2,3,6。針對不同類型,不同威脅度的目標究竟該選擇哪種類型的炮彈采用哪種方式進行射擊,這是一個決策問題。為使決策過程理想化,做如下規(guī)定:
1)若目標識別為水面目標,就選用Ⅰ型彈,若為空中目標就選用Ⅱ型彈,若為陸上目標就選用Ⅲ型彈。
2)通過威脅判斷計算出各個目標的威脅度,首先對威脅度進行歸一化處理,若威脅度在區(qū)間[0.7 1]內(nèi),就選用高射速,若在區(qū)間(0.3 0.7)內(nèi)就選用中射速,若在區(qū)間[0 0.3]內(nèi)就選用低射速。
3)當(dāng)選用特種彈時,若目標為單目標就選用點射,若目標為2 個連射就選用2,若目標為3 個連射就選用3,當(dāng)目標大于3 個時連射就選用6。
3.4 艦炮防御過程的Petri 網(wǎng)仿真運行
用可達標識圖來表示Petri 網(wǎng)的仿真結(jié)果,以圖2 所示的Petri 網(wǎng)作為仿真運行對象。通常,初始狀態(tài)M0=[1,0,0,0,0,0,0,0,0,0,1,0],由于該Petri 網(wǎng)的庫所較多,這種表示方法比較煩瑣,本文采用一種自定義的簡化方式進行描述,僅把有標識的庫所序號表示出來,例如,對于初始狀態(tài)M0,只有第1 個和第11 個庫所有標識,就把M0記為:M0=[1,11]。通過圖3 的可達標識圖可以看出,可達標識圖是貫通的。因此只要按與戰(zhàn)術(shù)規(guī)則相吻合的序列運行,可達標識圖就是貫通的,這說明對某型艦炮防御過程用Petri 網(wǎng)建模仿真是成功的。相反地,如果按與戰(zhàn)術(shù)規(guī)則不吻合的序列運行,則不會得到正確的運行結(jié)果,這也說明了對該問題用Petri 網(wǎng)建模仿真的嚴密性[4]。

圖3 Petri 網(wǎng)可達標識圖
4 結(jié)束語
本文對某型艦炮的防御過程做了初步研究,建立了相應(yīng)的Petri 網(wǎng)模型,使戰(zhàn)術(shù)規(guī)則與變遷相關(guān)聯(lián),同時對Petri 網(wǎng)也進行了說明并對射擊的決策過程做了定量描述,最后通過可達標識圖對建立的Petri 網(wǎng)進行了仿真運行,仿真結(jié)果說明所建立的模型是嚴密的。從而為下一步研究整個艦艇的防御提供了理論基礎(chǔ)。
[1]雷軍高,張從智.基于Petri 網(wǎng)的潛艇CGF 魚類攻擊行為建模[J].情報指揮控制系統(tǒng)與仿真技術(shù),2005,27(5):37-40.
[2]袁崇義.Petri 網(wǎng)原理與應(yīng)用[M].北京:北京電子工業(yè)出版社,2005:18-40.
[3]吳哲輝.Petri 網(wǎng)導(dǎo)論[M].北京:北京機械工業(yè)出版社2006:1-12.
[4]段浩,胡宗武.魚類發(fā)射過程控制序列的Petri 網(wǎng)仿真分析[J].系統(tǒng)仿真學(xué)報,2001,14(2):1064-1066,1072.
[5]譚樂祖,楊明軍,任東彥.彈炮結(jié)合防空動態(tài)火力分配模型[J].火力與指揮控制,2011(1):177-180.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
