電廠熱工智能控制系統(tǒng)的研究
2013-04-09 06:54:20崔師明范山東
機(jī)械制造與自動化 2013年1期
崔師明,范山東
(1.黑龍江林業(yè)高級技術(shù)學(xué)院,黑龍江 綏化 152061;2.黑龍江科技學(xué)院電氣與信息工程學(xué)院,黑龍江 哈爾濱 150027)
0 前言
電廠熱工是一個大滯后、非線性、時變的控制過程。為了在工業(yè)中更好的控制純滯后時變系統(tǒng),不少學(xué)者基于內(nèi)模控制結(jié)構(gòu),綜合各種控制(如模糊控制、自適應(yīng)控制、神經(jīng)網(wǎng)絡(luò))的優(yōu)點,提出了很多控制方法。而本文首先在總結(jié)2 自由度內(nèi)模控制的調(diào)節(jié)方法和規(guī)律的基礎(chǔ)上,采用模型參考自適應(yīng)控制的思想,將模糊控制方法和內(nèi)模控制方法結(jié)合在一起,提出了一種模型參考模糊自適應(yīng)內(nèi)模控制方法:采用相消法設(shè)計內(nèi)模控制器,用參考模型理想輸出和實際對象輸出之差e 及其變化率Δe 在線模糊調(diào)節(jié)控制器中濾波參數(shù),目標(biāo)是使系統(tǒng)輸出平穩(wěn)快速[1]。仿真結(jié)果表明,這種方法可以使系統(tǒng)的性能達(dá)到快速性和魯棒性的最佳結(jié)合。然后,在總結(jié)前人對輸入受限問題的處理經(jīng)驗的前提下,提出了一種限幅狀態(tài)與內(nèi)模控制相互切換的方法。最后,把控制器濾波參數(shù)的模糊自整定和有輸出限幅的內(nèi)模控制二者有機(jī)的結(jié)合起來,發(fā)揮各自的長處,形成在線智能切換的模型參考自適應(yīng)內(nèi)模控制方法,對由國內(nèi)某500 MW 火電廠鍋爐一級減溫系統(tǒng)的實際階躍響應(yīng)信號擬和出來的相應(yīng)的一級減溫被控對象動態(tài)傳遞函數(shù)進(jìn)行仿真,并與常規(guī)內(nèi)模控制系統(tǒng)、PID 控制系統(tǒng)作各種性能比較[2]。仿真結(jié)果表明,采用本文提出的方法在系統(tǒng)響應(yīng)的快速性、魯棒性和抗干擾方面都得到了較大改善,從而證明了方法的正確性和有效性。
本文綜合應(yīng)用內(nèi)模控制方法和模型參考自適應(yīng)控制的思路,控制器的設(shè)計用內(nèi)模結(jié)構(gòu)的相消法設(shè)計,調(diào)節(jié)信號來自參考模型輸出與系統(tǒng)實際輸出的誤差及其變化率,采用模糊調(diào)節(jié),目標(biāo)是使系統(tǒng)輸出平穩(wěn)快速[3]。系統(tǒng)結(jié)構(gòu)如圖1 所示。

圖1 系統(tǒng)示意圖
1 控制量限幅的內(nèi)模控制器
工業(yè)過程控制中,大部分控制量由于執(zhí)行機(jī)構(gòu)等的限制,控制信號的幅度和變化率都受到限制,若直接應(yīng)用未考慮控制受限的控制器就相當(dāng)于在系統(tǒng)中引入了非線性環(huán)節(jié),性能將大幅度下降。為了解決該問題,在總結(jié)前人對輸入受限問題的處理經(jīng)驗的前提下,提出了一種限幅狀態(tài)與內(nèi)模控制其相互切換的方法,即根據(jù)系統(tǒng)響應(yīng)是否在誤差帶范圍內(nèi)及系統(tǒng)的模型預(yù)測輸出是否超過一該誤差帶,來共同確定控制量在限幅值與內(nèi)模控制器輸出值之間進(jìn)行在線智能切換[4]。采用智能控制器的系統(tǒng)結(jié)構(gòu)圖如圖2 所示。
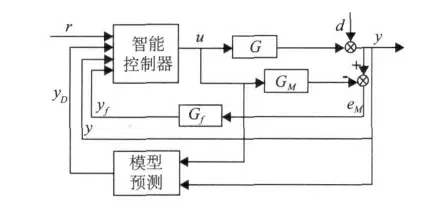
圖2 智能內(nèi)模控制結(jié)構(gòu)圖
如圖3,設(shè)y1和y2分別為系統(tǒng)實際響應(yīng)誤差帶的下、上限,y1'和y2'分別為系統(tǒng)預(yù)測輸出的上、下限,y1,y2,y1',y2'均可在線調(diào)整;yp(k+L)為系統(tǒng)模型預(yù)測輸出值,其L 表示滯后步數(shù)。為嚴(yán)格限制控制量u,保證系統(tǒng)良好的響應(yīng)速度及抗擾性,且系統(tǒng)響應(yīng)不出現(xiàn)過大超調(diào),對控制器的輸出采用分段計算的方法。即當(dāng)系統(tǒng)響應(yīng)小于y1且模型預(yù)測值也小于y1'時,用最大限幅值,以提高快速性;y(k)<y1且yp(k+L)<y1',按最大限幅值計算u(k);當(dāng)系統(tǒng)響應(yīng)大于y2且模型預(yù)測值也大于預(yù)測誤差帶y2'時,用最小限幅值;y(k)>y2且y(k +L)>y2',按最小限幅值計算u(k);其余時候就直接按式y(tǒng)=Gr×r +Gd×d=r計算控制量u(k)(圖3)。
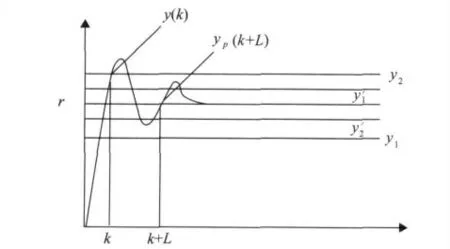
圖3 誤差帶示例
為驗證本方案的有效性,將本文方案與直接用常規(guī)內(nèi)模控制器輸出加限幅相比。取常見的一階慣性對象加純滯后,即實際對象為:

采樣周期T=1 s,加零階保持器后離散化模型為:

控制量限幅值為0≤u(k)≤1.8,取α=0.4,β=0.7,參考信號r 為單位階躍信號,在仿真時間40 s 時加一幅值為0.5 的階躍擾動。
當(dāng)模型精確時,智能控制系統(tǒng)對應(yīng)參數(shù)為:y1=0.85,y2=1.1,y1'=1,y2'=0.88,響應(yīng)如圖4 中實線所示,直接用常規(guī)內(nèi)模控制器輸出加限幅時,系統(tǒng)響如圖4 中虛線所示。控制量均經(jīng)系數(shù)為0.3 的變換后,表示在圖下方。
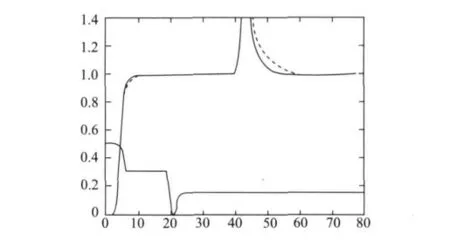
圖4 模型精確時的系統(tǒng)響應(yīng)
當(dāng)對象參數(shù)發(fā)生20%變化時,即實際對象為

本智能控制系統(tǒng)對應(yīng)參數(shù)為:y1=0.8,y1'=0.95,y2=1.15,y2'=0.9.響應(yīng)如圖5 中實線所示;直接用常規(guī)內(nèi)模控制器輸出加限幅時,系統(tǒng)響應(yīng)如圖5 中虛線所示。控制量均經(jīng)系數(shù)為0.3 的變換后,表示在圖下方。以上仿真結(jié)果表明,本文方案在其響應(yīng)速度、抗擾性及魯棒性等方面都有一定改善。
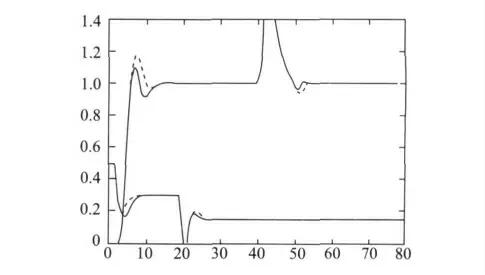
圖5 模型失配時的系統(tǒng)響應(yīng)
2 模型預(yù)測的改進(jìn)
考慮到實際對象中存在著時變或非線性等因素,或多或少的存在模型誤差,加上系統(tǒng)中的各種隨機(jī)干擾,使得預(yù)測模型不可能于實際對象的輸出完全一致。上一節(jié)所述方法的不足之處是,因為預(yù)測是基于模型,當(dāng)模型失配越大,預(yù)測就越不準(zhǔn)確,從而影響控制效果[5]。現(xiàn)舉例如下:
假定對象模型為:

采樣時間T=1 s,則其加零階保持器的離散化模型為:

當(dāng)實際對象有模型失配時,實際對象變成了:

這時,對于單位階躍輸入,在T=40 s 時加一幅值為0.5 的階躍擾動,根據(jù)模型的預(yù)測結(jié)果如圖6 中點劃線所示。

圖6 模型失配時的系統(tǒng)預(yù)測和真實響應(yīng)圖
圖6 中實線為實際輸出。從圖6 可以很清楚的看出,由于模型的失配,使得預(yù)測效果完全偏離系統(tǒng)的真實輸出。上述的預(yù)測都是完全基于其模型,實質(zhì)上是開環(huán)的。在預(yù)測控制中,其最具生命力的三大特征之一便是反饋校正。借鑒其思路,也利用反饋校正來修正開環(huán)模型預(yù)測。具體的做法就是:將第k 步的實際對象輸出測量值y(k)與預(yù)測模型輸出ym(k)之間的誤差,加到模型的預(yù)測輸出ym(k+i)上,得到閉環(huán)輸出預(yù)測,用yp(k+i)表示:

其中:h 為修正誤差系數(shù),em(k)為k 時刻預(yù)測模型輸出誤差。
由于系統(tǒng)存在純時延t,最開始em(k)(k=l,2,…,t+l)是0,到了t+l 時刻就會在預(yù)測值上突加一個em,對預(yù)測值有一定振蕩,為了減小這個影響,本文對h 取變參數(shù),剛開始時取h<l,慢慢增加h,最終取h=1。上述模型失配系統(tǒng)的預(yù)測結(jié)果如圖7 點劃線所示。實線為實際輸出。圖7 改進(jìn)后的預(yù)測輸出圖。根據(jù)上述改進(jìn)預(yù)測輸出的思想,對上面的系統(tǒng)進(jìn)行仿真。系統(tǒng)對象為:

圖7 改進(jìn)后的預(yù)測輸出圖

而發(fā)生模型失配后,實際對象為:

仿真結(jié)果如圖8 中實線所示,點劃線為未加改進(jìn)的模型預(yù)測所得響應(yīng)曲線。控制量均經(jīng)系數(shù)為0.3 的變換后,表示在圖下方。由圖8 和圖5 可以看出,利用改進(jìn)后的帶反饋校正的模型預(yù)測代替簡單模型預(yù)測作為系統(tǒng)預(yù)測輸出,系統(tǒng)響應(yīng)比改進(jìn)前有更好的響應(yīng)特性,從而驗證了本文方法的正確性和有效性[6]。

圖8 改進(jìn)后有模型失配時的系統(tǒng)響應(yīng)圖
3 仿真研究
在前面的章節(jié)里已經(jīng)分別討論了控制器濾波參數(shù)的模糊自整定和有輸出限幅的內(nèi)模控制問題,且分別作的仿真都己經(jīng)證明了方法的正確性和有效性。本文把二者有機(jī)的結(jié)合起來,發(fā)揮各自的長處,形成在線智能切換的模型參考模糊自適應(yīng)內(nèi)模控制方法。結(jié)構(gòu)框圖如圖9。

圖9 采用模糊調(diào)節(jié)器的自適應(yīng)內(nèi)模控制
為了驗證本文提出的該方法的有效性,用Matlab 對系統(tǒng)進(jìn)行仿真,仿真框圖采用圖9 的結(jié)構(gòu),并將系統(tǒng)仿真結(jié)果與模型參考模糊自適應(yīng)內(nèi)模控制加限幅輸出方法進(jìn)行比較。上圖中,G 為實際對象,GM為被控對象模型,Q是包含調(diào)節(jié)濾波參數(shù)和處理有控制限幅的智能控制器,F(xiàn)饋為反濾波器,R,D 和Y 分別代表參考輸入、擾動和輸出,M,e,e 和Δe 分別表示模型誤差、理想輸出和實際輸出之差e 及其變化率[7]。
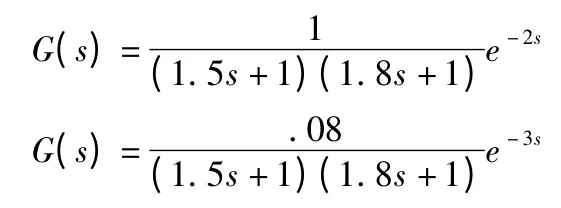
對象模型為工業(yè)過程中常見的二階慣性環(huán)節(jié)加純滯后

其中,T1=1.5,T2=1.8,K=1,τ=2 采樣周期為T=1 s,則其加零階保持器的離散化模型為:

被控對象分別取以下3 種形式(采樣周期T=0.5 s):
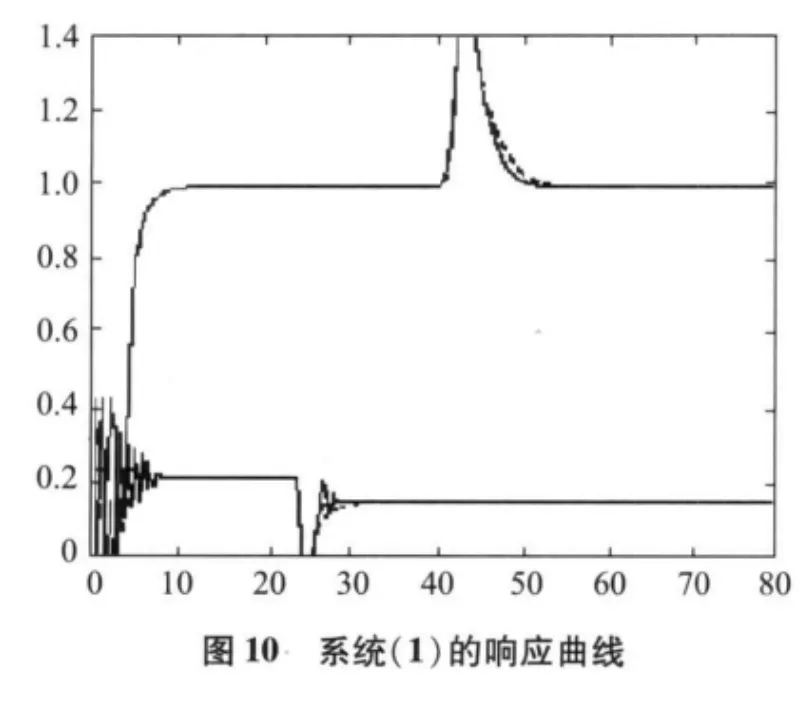
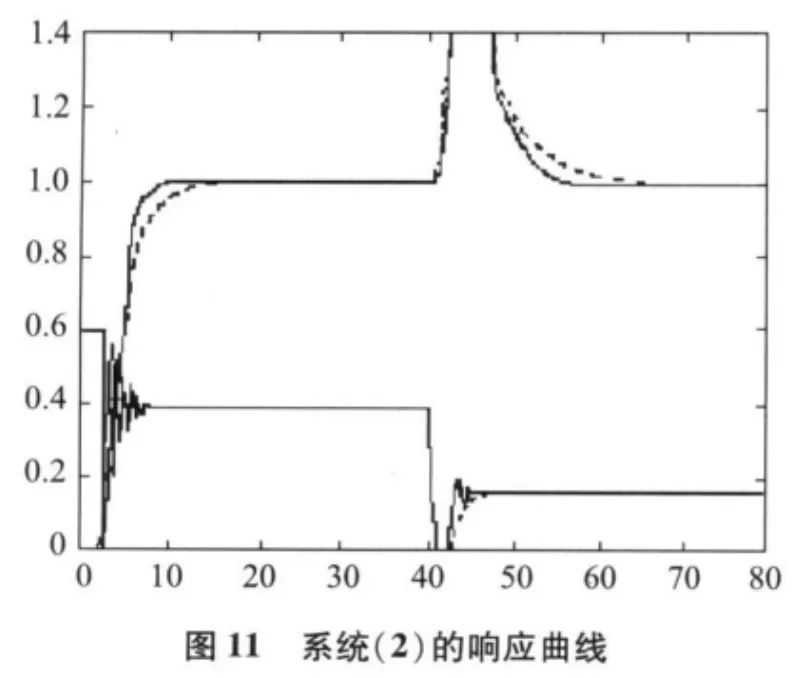
從仿真結(jié)果可以看出,無論有無模型誤差,采用本文提出的方法在系統(tǒng)響應(yīng)的快速性、平穩(wěn)性和魯棒性方面都得到了較大改善,從而證明了本文方法的正確性和有效性。

圖12 系統(tǒng)(3)的響應(yīng)曲線
4 結(jié)論
在結(jié)合對輸入受限問題的處理經(jīng)驗的前提下,本文根據(jù)系統(tǒng)響應(yīng)是否在誤差帶范圍內(nèi)及系統(tǒng)模型的預(yù)測輸出是否超過該誤差帶,來共同確定控制量在限幅值與內(nèi)模控制器輸出值之間進(jìn)行在線智能切換。其特點是:在線調(diào)節(jié)時,當(dāng)滯后增大或者模型失配時,適當(dāng)減小系統(tǒng)實際響應(yīng)誤差帶和系統(tǒng)預(yù)測輸出的的上限,增大系統(tǒng)實際響應(yīng)誤差帶和系統(tǒng)預(yù)測輸出的的下限,便可獲得較好的效果,該方法簡單實用,便于在線調(diào)節(jié),具有一定的工程應(yīng)用價值;另外,對模型失配較大情況下預(yù)測不準(zhǔn)進(jìn)行了討論,受預(yù)測控制的啟發(fā),在模型預(yù)測中引入反饋校正,即根據(jù)k 時刻以及以前時刻的預(yù)測誤差對未來的模型預(yù)測值進(jìn)行修正。使預(yù)測更加準(zhǔn)確,從而更精確的決定控制狀態(tài)的切換和控制量的選取,使系統(tǒng)響應(yīng)獲得更好的快速性、平穩(wěn)性和抗擾性。仿真結(jié)果證明了本文方法的正確性和有效性。
[1]張玉鐸,王滿稼.熱工自動控制系統(tǒng)[M].北京:水利電力出版社,1984.
[2]Garcia C.E.,Morari,M.Intemal model control.2.Design procedure for multivariable systems.I&EC process Des.Dev.,1985,24(2):472-484.
[3]祝小蓮,等.一種有輸出限幅的智能內(nèi)模控制器設(shè)計方法[J].昆明理工大學(xué)學(xué)報.2001,26(增刊):132-134.
[4]郭巨眾.模糊內(nèi)模控制模糊內(nèi)模控制及其在過熱汽溫控制中的應(yīng)用[M].太原:太原理工大學(xué),2003.
[5]李成鑫,趙耀.有控制輸出限幅的智能內(nèi)模控制器的一種改進(jìn)[J].貴州科學(xué)學(xué)報,2002,20(4):10-12.
[6]廖明,吳寧,謝品芳.神經(jīng)網(wǎng)絡(luò)內(nèi)模控制算法的研究[J].電氣傳動自動化,1998,20(4):24-28.
[7]范影樂,楊勝天,李軼.MATLAB 仿真應(yīng)用詳解[M].北京:人民郵電出版社,2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34