永磁直驅風電機組低電壓穿越時的有功和無功協調控制
2013-01-16 00:57:40李和明董淑惠任亞釗
電工技術學報 2013年5期
關鍵詞:控制策略
李和明 董淑惠 王 毅 任亞釗
(新能源電力系統國家重點實驗室(華北電力大學) 保定 071003)
1 引言
隨著風力發電在電網穿透率的不斷增加,風電機組的安全穩定運行對電網的影響[1-3]已不容忽視。近期由于并網風電機組不具備低電壓穿越能力而引發的多次大規模風電脫網事故,已影響到電網的正常運行。因此,并網風電機組的低電壓穿越問題亟待解決[4],尤其對于已并網的不具備低電壓穿越能力的風電機組,急需可靠并經濟的改造方案。而對已具備低電壓穿越能力的風電機組,還應提高其對電網的動態無功支持能力,從而穩定電網故障情況下的并網點電壓,避免因電網無功重新分配或晶閘管控制電抗器(Thyristor Controlled Reactor, TCR)脫網時電壓波動引起的高電壓穿越等問題。
目前,關于風力發電系統的低電壓穿越研究大多針對雙饋型風電機組,需采用主動式或被動式Crowbar來避免風機變流器的過電壓和過電流,雖然可以滿足并網準則對低電壓穿越的要求,但存在以下固有問題:
(1)雙饋電機變為不受控的異步發電機運行后,穩定運行的轉速范圍受最大轉差率所限而變小,若變槳系統未能快速限制捕獲的機械轉矩,仍很容易導致轉速飛升。
(2)由于Crowbar動作前后,發電機的勵磁分別由變流器和電網提供,兩種狀態的切換會在低電壓穿越過程中對電網造成無功沖擊。
(3)即使在低電壓穿越過程中,網側變流器保持聯網,受其容量限制,提供的無功功率主要供給異步發電機建立磁場,而對系統的無功支持很弱[5-8]。
通過全功率變流器并網的風力發電機組,如永磁直驅同步發電機組(Permanent Magnet Synchronous Generator, PMSG),已被證實在低電壓穿越特性方面更具優勢[9,10]。其實現風電機組的低電壓穿越的關鍵問題在于維持變流器直流環節電容電壓的穩定[11]。而通過穩定直流電壓實現PMSG風電機組低電壓穿越的研究方案主要有:通過在直流側安裝卸荷電路消納多余的能量[12];在直流側安裝儲能裝置,如超級電容等,快速吞吐有功功率[13,14];并聯輔助變流器增加直流側功率的輸出通道[15,16]。上述方法均需增加外部硬件電路,增加了變流器的體積及成本;并且在電網電壓跌落時,網側變流器處于限流狀態,無法對電網提供動態的無功支持;在低電壓穿越前后,網側變流器在直流電壓控制和限流控制之間的切換會造成直流電壓的波動。
本文主要研究全功率變流器并網的永磁直驅風電機組在電網故障穿越時的有功和無功協調控制,從而提高其低電壓穿越能力,并對電網提供動態支持。文中首先分析PMSG風電機組機側和網側變流器的傳統控制策略,研究電網電壓跌落引起直流側電壓波動的原因及Crowbar保護原理;在此基礎上提出一種適用于全功率變流器并網風電機組的新型控制方案,該方案無需外加Crowbar電路,采用機側變流器控制直流側電壓,而有功和無功的協調控制由網側變流器完成;并從理論上分析所提出控制方法對風力機轉速變化的影響;最后,在基于Matlab/Simulink構建的PMSG風電機組并網仿真模型上對所提控制方法進行了仿真驗證。
2 PMSG的數學模型及控制策略
圖1為采用雙PWM變流器并網的永磁直驅風電機組結構框圖。PMSG傳統控制策略是通過機側變流器實現最大風能跟蹤;通過網側變流器實現直流側電壓的穩定調節和單位功率因數控制;當電網電壓跌落時,通過Crowbar保護電路消納多余能量,實現PMSG的低電壓穿越。

圖1 永磁直驅風電機組并網結構框圖Fig.1 Schematic diagram of a PMSG-based wind generation system
2.1 機側變流器的控制策略
PMSG在 dq同步旋轉坐標系下的矢量數學模型為
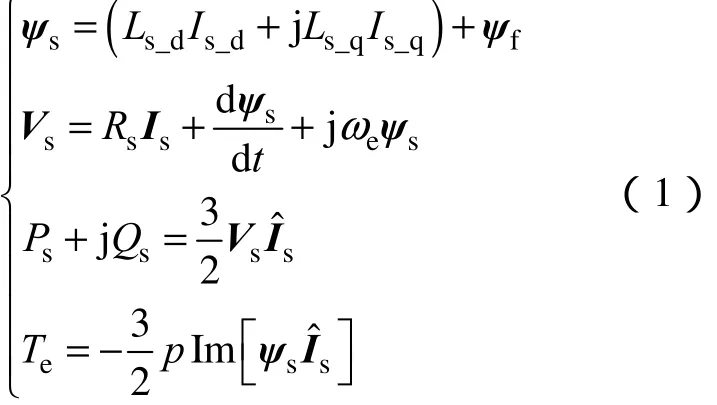
式中,ωe為轉子的電角速度;Vs、Is分別為定子電壓、電流矢量;ψs、ψf分別為定子磁鏈矢量、轉子永磁體在定子中感應的磁鏈矢量;Ls_d、Ls_q分別為定子 d軸和 q軸電感;Rs為定子電阻;Te、Ps、Qs分別為PMSG的電磁轉矩、定子側有功、無功功率;p為PMSG的極對數。
忽略定子電阻及定子磁鏈變化,將同步旋轉坐標系的d軸定向在定子磁鏈矢量上,由式(1)可得PMSG定子側有功、無功和電磁轉矩方程為
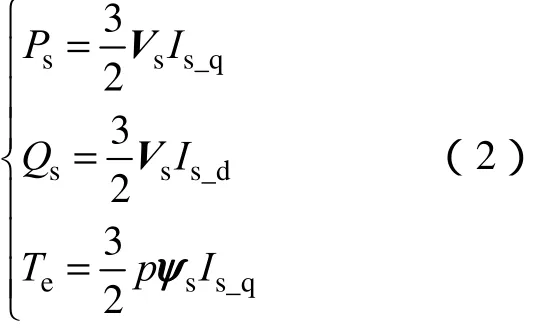
由式(2)可知,通過分別控制定子電流的d軸分量Is_d和q軸分量Is_q,實現PMSG機組的有功功率和無功功率的解耦控制。

圖2 機側變流器控制策略結構圖Fig.2 Control diagram of the generator-side converter
2.2 網側變流器的控制策略
圖4為全功率變流器在dq同步旋轉坐標系下矢量等效電路。由圖4可知,全功率變流器的電壓、功率方程為

圖3 PMSG最大功率跟蹤曲線Fig.3 Maximum power point tracking curve of PMSG

圖4 全功率變流器的矢量等效電路Fig.4 Equivalent circuits of a ful-scale frequency converter

式中,Vg、Ig分別為網側電壓、電流矢量;Vc為網側變流器交流側輸出電壓矢量;Rc、Lc分別為網側濾波電抗器的等效電阻、電感;C、Vdc分別為直流側電容、直流側電壓;Pg、Qg分別為網側有功、無功功率。
忽略電阻Rc及電感Lc的電磁暫態,采用電網電壓定向的矢量控制策略,由式(3)可得 PMSG網側變流器有功、無功功率方程為

由式(4)可知,通過對網側電流d軸分量Ig_d和q軸分量Ig_q的分別控制,實現PMSG網側變流器功率解耦控制。
傳統控制策略通常采用網側變流器實現直流電壓控制及單位功率因數控制,控制結構如圖5所示。

圖5 網側變流器控制策略結構圖Fig.5 Control diagram of the grid-side converter
3 電壓跌落時直流電壓波動及抑制原理
由圖1可知,風電機組捕獲的機械功率為Pm,PMSG輸出的電磁功率Ps經機側變流器后饋入直流側,網側變流器通過控制直流電壓的恒定送入電網的有功功率為Pg。在穩態并忽略損耗的情況下,Pm=Ps=Pg,轉速和直流電壓均保持穩定。
系統發生擾動后,由式(4)可知,電網電壓的跌落與恢復引起Vg變化、而系統側的功率振蕩及變流器的限流控制等因素引起Ig變化,從而導致PMSG網側變流器輸出功率Pg不穩定。由于全功率變流器的隔離作用,風電機組仍工作于最大功率跟蹤狀態,由圖3最大功率跟蹤控制曲線可知,機側變流器有功輸出Ps僅取決于轉子轉速,由于風電機組慣性較大,在電網擾動過程中Ps變化不大,因而捕獲的風電功率并未因電壓跌落而變化。此時Ps≠Pg,即直流側功率無法平衡。由式(3)可得,PMSG直流側電容器的充放電功率為

由上式可知,功率的不平衡將導致直流電壓抬升及劇烈波動而影響其穩定運行。
為抑制直流電壓的波動,實現風電機組的低電壓穿越,傳統控制方案通常需要在直流側安裝卸荷電路(如Crowbar保護電路)消納多余的能量。實際上,若能在電網出現擾動時利用機側變流器及時控制調節PMSG功率輸出,保持Ps=Pg,則直流電壓波動也能得到有效抑制。而此時,系統功率的不平衡將轉變為PMSG的機械功率Pm和電磁功率Ps的不平衡,這引起發電機轉速變化[18],即

式中,ΔPe為PMSG有功變化量;ωe為PMSG轉子的電角速度;JP為PMSG的轉動慣量。
由上述分析可知,在電網擾動的動態過程中,若將變流器能量不平衡轉化為PMSG旋轉動能的變化,則可使直流電壓波動轉化為轉速的波動。將式(5)和式(6)在相同時間段Tk內積分,在同樣的功率不平衡情況下,引起的轉速變化和直流電壓變化之間的關系為

式中,ωe0、ωe1分別為PMSG在Tk時間段前后的電角速度;Vdc_N為直流電壓額定值。將式(7)轉換為標幺值形式,則可得

式中,ωe_N為PMSG的額定轉速;Ec為電容額定電壓時儲存的電能;Ek為PMSG額定轉速時儲存的動能。
在電網發生擾動后,由于變流器限流或輸出功率振蕩,PMSG輸出的電磁功率無法和捕獲的風功率相平衡。式(8)反映了在相同的不平衡功率作用下引起的電機轉速變化和電容直流電壓變化的關系。通常風電機組的機械儲能Ek遠大于電容器儲能Ec[19],由式(8)可知,若 PMSG的功率不平衡由機械儲能系統承擔,此時所引起的轉速波動會遠小于由直流電容承擔不平衡功率時引起的電壓波動。并且變槳系統調節機械功率Pm限制轉速,從而使PMSG在故障擾動過程中具有更好的穩定性。為使不平衡功率只作用在機械系統而不影響直流電壓,需要對變流器的傳統控制策略進行優化。
4 PMSG的新型低電壓穿越控制策略
4.1 系統的控制結構
圖6為本文所提永磁直驅風電機組的新型控制策略圖,其中機側變流器控制直流電壓及發電機交流電壓,而網側變流器實現最大功率跟蹤控制及系統側的無功與電壓控制。在該控制策略中,直流電壓在電網故障擾動前后始終由不受電網故障干擾的機側變流器控制,穩定性更好;由于輸出有功與無功功率的控制同在網側變流器中完成,易于在故障穿越過程中對其協調控制;該控制策略無需增加直流卸荷電路。

圖6 基于轉子儲能方式的變流器控制策略圖Fig.6 Control diagrams of full-scale converter based on rotor energy storage

網側變流器通過判斷電網電壓Vg實現網側有功和無功功率的協調控制。如圖6b所示,當電網電壓正常時,為有功優先的最大功率跟蹤控制,即在對有功和無功電流限幅時,首先滿足有功電流;當電網電壓發生跌落時,由于網側變流器的限流作用,若繼續執行有功優先控制,則網側變流器僅處于功率限幅狀態,無法對系統提供無功支持,因此采用無功優先控制。在網側變流器輸出的有功電流控制環節加入限流控制,防止有功電流突變所引起的直流側電容充放電電流的突變,從而有效抑制因網側變流器工作模式切換而引起的直流電壓的波動。
風電機組在電壓跌落過程中只是對系統提供一定的無功支持,并不能使并網點電壓恢復到額定值,因此不再采用PI控制,而是根據電網電壓跌落的幅度調節網側變流器的無功電流,改善電壓跌落情況,進而提高風電機組的低電壓穿越能力。國網公司的并網技術規范要求總裝機容量在百萬千瓦級規模及以上的風電場群,當電力系統發生三相短路故障引起電壓跌落時,每個風電場在低電壓穿越過程中風電場注入電力系統的動態無功電流為

式中,Vg為風電場并網點電壓標幺值;IN為風電場額定電流。無功優先控制時的無功電流根據式(9)計算得到。
4.2 系統的工作原理
圖7為基于轉子儲能方式實現PMSG低電壓穿越控制策略的工作原理。如圖7所示,以9m/s風速為例,PMSG運行在最大功率跟蹤狀態,運行點穩定在最大功率跟蹤曲線上的A點,輸出有功功率為PA;當電網發生電壓跌落故障時,網側變流器輸出功率受限,限幅值為Plim,風電機組運行點由A點切換到O點,有功輸出鉗位在Plim。采用機側變流器實現變流器直流電壓的穩定,將變流器兩端的功率不平衡轉移到PMSG的轉子上,促使轉子加速儲存動能,風電機組運行點由O點切換到B點。當電網電壓恢復后,網側變流器輸出功率限幅值恢復到其額定值PN,風電機組的運行點由 B點切換至 C點;此時發電機的輸出功率PC大于風力機的機械功率Pm,發電機轉子減速,釋放動能,風電機組運行點由C點沿最大功率跟蹤曲線Popt移動到A點,恢復至故障前的穩定運行狀態。

圖7 基于轉子儲能方式實現低電壓穿越的工作原理Fig.7 Principle of achieving low voltage ride through based on the rotor energy storage
根據式(6)可得

式中,t0為電網故障發生時刻;Tk為電網故障持續時間;ωe0和ωe1分別為故障發生前后轉子的轉速。
當額定風速時,網側變流器輸出額定功率PN,此時電網發生電壓跌落故障,最不利于風電系統實現低電壓穿越。若電網電壓跌落深度為額定電壓的100%,則網側變流器輸出功率的限幅值Plim為0。在這種極端情況下的故障持續時間Tk內,發電機轉子轉速的變化量可表示為

由式(11)可知,在整個故障持續時間內,發電機轉子轉速的變化可表示為

慣性時間常數H的定義為

將式(13)代入式(12)可得

風力機慣性時間常數Hturb的典型取值范圍是3.0~6.0s,發電機轉子慣性時間常數Hgen的典型取值范圍是0.4~0.8s[18]。由式(14)可知,采用基于轉子儲能方式實現低電壓穿越的過程中,發電機轉子增速的極限范圍為 4%~8%,并且風力機變槳調節系統可在轉子超速時及時限制轉速,因此該方法不會引起太大的轉速波動及過速保護動作。
5 系統仿真驗證
本文基于 Matlab/Simulink搭建了直驅式永磁同步風力發電系統的仿真模型,通過與基于Crowbar保護電路的傳統低電壓穿越方法的對比,驗證本文所提出低電壓控制策略的動態性能及對風力機轉速的影響。仿真系統結構如圖8所示,風電機組和電網參數見下表。

圖8 永磁直驅風電機組并網仿真結構圖Fig.8 Structure diagram of the grid-connected PMSG-based wind generation system

表 風電系統仿真參數Tab. Parameters of PMSG-based wind power system
通過該仿真系統,對兩種控制方式下的低電壓穿越和高電壓穿越分別作了仿真研究。電網在 2s時發生電壓跌落故障,電壓跌落深度為額定電壓的80%,持續時間為0.625s;在4~5s期間電網電壓抬升15%。仿真結果如圖9所示。
圖9a和圖9b分別為在電網電壓擾動后,在傳統變流器控制策略下基于Crowbar的低電壓穿越方式和本文所提出有功和無功協調控制策略下基于轉子儲能的低電壓穿越控制方式的動態響應對比,包括電網電壓Vabc、電網電流Iabc、風力機捕獲的機械功率Pm、機側和網側變流器有功功率Ps和Pg、發電機轉速ωe、網側變流器的有功電流和無功電流Id、Iq和變流器直流側電壓Vdc。

圖9 兩種控制策略下PMSG低電壓穿越的動態響應對比Fig.9 The comparison of PMSG low voltage ride through dynamic responses in both control strategies
由圖9a可知,當電網電壓發生跌落故障時,在基于Crowbar的傳統控制策略下,網側變流器進入限流模式,輸出有功Pg下降至 20%,并且由于Id限幅已不能再控制直流電壓;故障期間機側變流器仍處于最大功率跟蹤控制狀態,PMSG捕獲的機械功率Pm和機側變流器有功Ps均未發生變化,從而引起直流側電容兩端功率不平衡,造成直流電壓Vdc升高,觸發Crowbar電路中功率開關動作來維持直流側電壓的穩定。電網電壓恢復后,網側變流器輸出有功輸出Pg恢復至故障前的水平,并退出限流狀態恢復對直流電壓的控制作用,但在與Crowbar切換控制直流電壓過程中,會引起直流電壓Vdc的短暫跌落,之后迅速穩定在額定值。在低電壓穿越過程中,由于網側變流器已處于限流狀態,并全部為有功分量Id,并未對電網起到無功支持的作用,并網點電壓的跌落情況沒有得到改善,跌落幅度仍為額定值的80%。
由圖9b可知,在本文所提出的有功和無功協調控制策略下,電網電壓跌落發生后,網側變流器進入限流模式而不再進行最大功率跟蹤控制,輸出有功功率Pg受限;機側變流器通過限制 PMSG的有功輸出Ps,抑制直流電壓波動,實現直流側電壓Vdc的穩定;而此時功率的不平衡體現為PMSG機械功率Pm與電磁功率Ps的不平衡,引起轉子轉速ωe加速,轉子儲存了低電壓穿越過程中的不平衡能量。由于風電機組的機械儲能能力遠大于電容器儲能能力,該仿真算例在電壓跌落期間,轉子轉速增加幅度約為額定轉速的 3%。在電壓恢復后,網側變流器重新運行于最大功率跟蹤狀態,轉子轉速逐漸降至故障前水平,從而釋放了所存儲的電壓跌落過程未輸出的能量ΔP,而對于Crowbar方式這部分能量則完全被消耗掉;由于機側變流器一直處于直流電壓控制狀態,因而直流電壓Vdc波動較小。在電網電壓跌落過程中,雖然網側變流器也處于限流狀態,但通過無功功率優先控制,此時以輸出無功電流為主,根據式(9),Iq=0.9(pu),對電網電壓提供動態支持,電網電壓跌落幅度由原來的 80%減小到了70%,電網電壓跌落情況得到改善。在4s之后,電網電壓抬升15%,此時網側變流器切換為無功優先控制模式,通過吸收無功電流(Iq=1.1(pu))將電壓調整到安全運行范圍內(Vg=1.03(pu)),雖然有功輸出Pg略有減小,但可有效避免風電機組因過電壓而脫網。
6 結論
本文提出了一種適合永磁直驅風電機組低電壓穿越功能的新型控制策略。該控制策略采用機側變流器控制直流電壓,網側變流器進行最大功率跟蹤控制,從而將電壓跌落過程中功率不平衡使電容電壓升高的電磁暫態問題轉化為使電機轉速升高的機電暫態問題,利用風機的慣性儲能來進行低電壓穿越;并可根據電網電壓對有功和無功進行協調控制,以提高在電壓跌落和抬升時風電機組運行的穩定性。該控制策略除無需增加外部硬件電路,還具有以下優點:
(1)在低電壓穿越過程中,有效利用轉子儲能減小有功損失。
(2)電網電壓跌落前后,機側變流器一直處于直流電壓控制狀態,而不存在變流器與Crowbar的控制切換,直流電壓波動更小。
(3)通過有功和無功的協調控制,還可有效對電網擾動時無功潮流調整和無功補償裝置中的TCR脫網等引起的高電壓進行穿越。
[1] Zhaoyang Dong, Kit Po Wong, Ke meng, et al. Wind power impact on system operations and planning[C].IEEE Power and Energy Society General Meeting,2010: 1-5.
[2] Ma M, Liu Y H, Zhao D M. Research on the impact of large-scale integrated wind farms on the security and stability of regional power system[C]. International Conference on Power System Technology, 2010: 1-6.
[3] 遲永寧, 劉燕華, 王偉勝, 等. 風電接入對電力系統的影響[J]. 電網技術, 2007, 31(3): 77-81.Chi Yongning, Liu Yanhua, Wang Weisheng, et al.study on impact of wind power integration on power system[J]. Power System Technology, 2007, 31(3):77-81.
[4] 張麗英, 葉廷路, 辛耀中, 等. 大規模風電接入電網的相關問題及措施[J]. 中國電機工程學報, 2010,30(25): 1-9.Zhang Liying, Ye Tinglu, Xin Yaozhong, et al.Problems and measures of power grid accommodating large scale wind power[J]. Proceeding of the CSEE,2010, 30(25): 1-9.
[5] Rahimi M, Parniani M. Coordinated control approaches for low-voltage ride-through enhancement in wind turbines with doubly fed induction generators[J]. IEEE Transactions on Energy Conversion, 2010,25(3): 873-883.
[6] Yi Wang, Lie Xu. Coordinated control of DFIG and FSIG-Based wind farms under unbalanced grid conditions[J]. IEEE Transactions on Power Delivery,2010, 25(1): 367-377.
[7] Petersson A, Thiringer T, Harnefors L, Petru T.Modeling and experimental verification of grid interaction of a DFIG wind turbine[J]. IEEE Transactions on Energy Conversion, 2005, 20(4):878-886.
[8] 賀益康, 周鵬. 變速恒頻雙饋異步風力發電系統低電壓穿越技術綜述[J]. 電工技術學報, 2009, 24(9):140-146.He Yikang, Zhou Peng. Overview of the low voltage ride-through technology for variable speed constant frequency doubly fed wind power generation systems[J]. Transactions of China Electrotechnical Society,2009, 24(9): 140-146.
[9] Li Jianlin, Zhu Ying, He Xiangtao,et al. Study on low voltage ride through characteristic of full power converter direct-drive wind power system[C]. IEEE 6th International Conference on Power Electronics and Motion Control, 2009: 331-340.
[10] Yao Xingjia, Liu Yingming, Bao Jieqiu, et al.Research and simulation of direct drive wind turbine VSCF characteristic[C]. IEEE International Conference on Automation and Logistics, 2008: 1683-1687.
[11] Banham Hall D D, Taylor G A, Smith C A, et al.Towards large-scale direct drive wind turbines with permanent magnet generators and full converters[C].IEEE Power and Energy Society General Meeting,2010: 1-8.
[12] 胡書舉, 李建林, 許洪華. 適用于直驅式風電系統的 Crowbar電路分析[J]. 電力建設, 2007, 28(9):44-47.Hu Shuju, Li Jianlin, Xu Honghua. Analysis of crowbar circuits used in direct-drive WTG systems[J].Electric Power Construction, 2007, 28(9): 44-47.
[13] 張坤, 毛承雄, 陸繼明, 等. 基于儲能的直驅風力發電系統的功率控制[J]. 電工技術學報, 2011,26(7): 7-14, 43.Zhang Kun, Mao Chengxiong, Lu Jiming, et al. Power control strategy of directly driven wind turbine with energy storage system[J]. Transactions of China Electroterchnical Society, 2011, 26(7): 7-14, 43.
[14] 王文亮, 葛寶明, 畢大強. 儲能型直驅永磁同步風力發電控制系統[J]. 電力系統保護與控制, 2010,38(14): 43-48, 78.Wang Wenliang, Ge Baoming, Bi Daqiang. Energy storage based direct-drive permanent magnet synchronous wind power control system[J]. Power System Protection and Control, 2010, 38(14): 43-48,78.
[15] 胡書舉, 李建林, 許洪華. 直驅式 VSCF風電系統直流側Crowbar電路的仿真分析[J]. 電力系統及其自動化學報, 2008, 20(3): 118-123.Hu Shuju, Li Jianlin, Xu Honghua. Simulation analysis of DC-link crowbar for direct-drive VSCF wind power system[J]. Proceedings of the CSU-EPSA,2008, 20(3): 118-123.
[16] 張興, 張龍云, 楊淑英, 等. 風力發電低電壓穿越技術綜述[J]. 電力系統及其自動化學報, 2008,20(2): 1-8.Zhang Xing, Zhang Longyun, Yang Shuying, et al.Low voltage ride-through technologies in wind turbine generation[J]. Proceedings of the CSU-EPSA,2008, 20(2): 1-8.
[17] Xu Yang, Xiang Gong, Wei Qiao. Mechanical sensorless maximum power tracking control for direct-drive PMSG wind turbines[C]. IEEE Energy Conversion Congress and Exposition (ECCE), 2010:4091-4098.
[18] (Germany)Ackermann T. Wind power in power systems[M]. Chichester: John Wiley and Sons Ltd.,2005.
[19] Lopes L A C, Lhuilier J, Mukherjee A, et al. A wind turbine emulator that represents the dynamics of the wind turbine rotor and drive train[C]. IEEE 36th Power Electronics Specialists Conference, 2005:2092-2097.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
